

基于树莓派的监控机器人设计
电子说
描述
该项目基于关于如何制造每个人都可以构建的简单且便宜的在线监控摄像头机器人的想法而构建。不仅机器人还必须易于使用和维护。使用树莓派,少量廉价组件,机器人底盘/ RC汽车以及MagPi杂志上的webiopi教程,该项目已成功构建。为了启动该机器人以使其可在线访问,使用了ngrok服务。现在,无需任何忙碌且困难的端口转发配置,只需使用firefox或chrome浏览器就可以从世界上任何人控制此机器人。
整个系统的图:
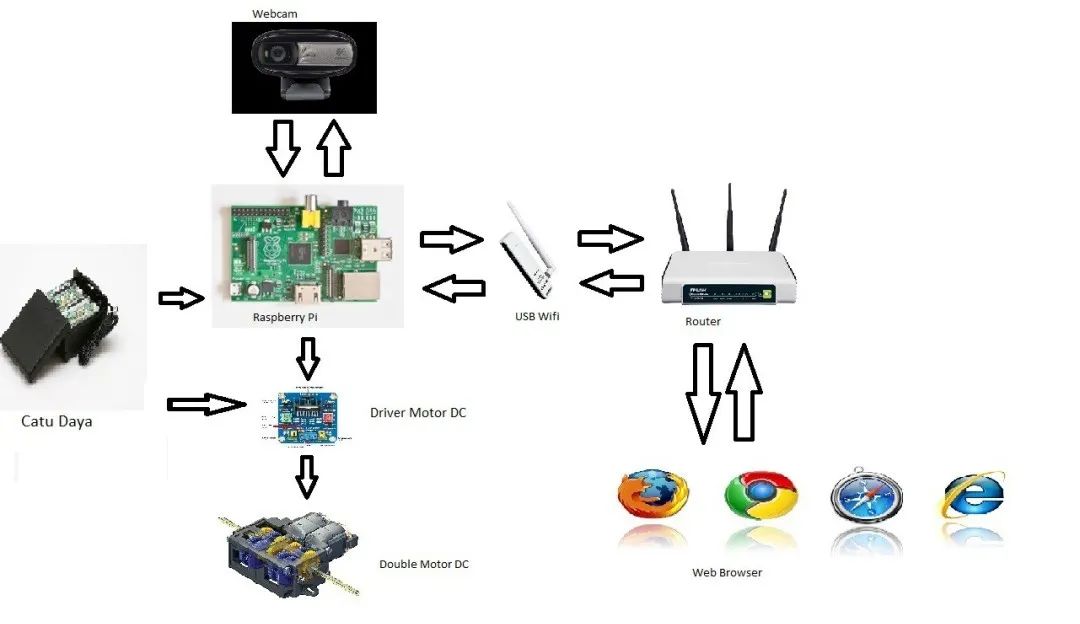
为了驱动电动机,我不需要使用其他的microntrollers板,因为Raspberry Pi能够直接运行电动机驱动器电动机。对于电动机驱动器,我选择L298n电动机驱动器模块,因为它可以给电动机提供2A电流,并具有4个安装孔,可以用螺母或垫片固定,而且价格也很便宜。它需要5v逻辑输入,而树莓派需要从GPIO获得3,3v输出。但是,第一次尝试时,它可以从树莓派获得3,3 V输入。而且运行良好。无论使用哪种底盘,机器人都能平稳移动。它还具有板载散热器,可使L298 IC有点“冷却”。
确保树莓派已连接到您的网络.在树莓派上使用以下命令启动python程序:$ sudo python surocam.py 启动浏览器,然后打开:
对于第一个机器人原型,我使用在工作站周围放置的任何材料。我找到了用于以前的arduino项目的廉价RC车。所以我拔下了Arduino并将Raspberry Pi插入RC汽车底盘,这个第一个原型运行得非常好而且很快。接下来,我需要使其看起来更好,第二个原型我使用了田宫的轨道套件,在整理了所有零件和电缆后,我得到了更好的结果,但是我仍然不满意这款机箱,并且由于重量问题,它运行不稳定。对于第三个也是最后一个原型,我使用RP5坦克,它看起来比以前更好,不仅所有零件都整齐地安装,而且该机箱使机器人运行非常稳定。
责任编辑:xj
原文标题:基于树莓派的监控机器人,手上有材料的赶紧行动~
文章出处:【微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
-
能够精准定位的树莓派机器人!2025-05-17 1732
-
基于树莓派的四足喷水机器人设计2024-01-22 3626
-
基于树莓派的机器人设计方案2023-10-19 1717
-
基于树莓派的交互机器人设计2023-09-18 2654
-
树莓派机器人船构建2023-07-10 901
-
使用PS4控制器控制监控树莓派机器人2022-10-28 823
-
基于树莓派的语音智障机器人设计jf_06209345 2022-07-24
-
如何使用树莓派开发智能机器人控制系统2021-12-23 4813
-
基于SLAM的移动机器人设计2021-11-08 3223
-
【orangepi zero申请】基于香橙pi的机器人设计2016-12-08 4629
-
树莓派语音识别机器人(下)2016-01-20 34434
-
有关树莓派制作机器人平台的探索2015-11-10 4489
-
树莓派打造视频监控机器人Verybot2014-09-18 112774
-
变形乐高玩具变形和树莓派一起玩出乐高机器人!2014-09-02 11860
全部0条评论

快来发表一下你的评论吧 !
