

基于脉冲激光器和ICCD摄像机实现水下距离选通同步控制系统的设计
描述
水下激光成像技术是基于蓝绿激光处于水下的传输“窗口”而发展起来的。激光器向水下目标发射脉冲激光,测量从目标反射回来的信号,获取目标的图像信息。由于蓝绿激光成像系统的高分辨率和较远的作用距离,除了可以应用于军事领域之外还广泛应用于水下监测、海洋生物遥测和石油开采等领域,因此对其研究是非常有意义的。由于水下溶解物质和悬浮体的存在,使得水下比较浑浊,产生后向散射影响比较严重,造成成像质量急剧下降。为了有效地克服后向散射的影响,常选用距离选通成像技术。
水下距离选通成像系统主要由窄脉冲激光器、同步控制装置、选通型ICCD摄像机组成。
同步控制技术主要是通过一个同步控制装置,完成脉冲激光器和ICCD摄像机同步工作,通过精确控制ICCD选通门的开肩和关闭来实现距离选通功能。为了有效同步,本设计使用高性能的FPGA产生纳秒级的选通脉冲选通ICCD摄像机,并且将测距的思想加入到电路中,对于固定距离和不定距离的水下目标成像都可以精确控制距离延迟时间和门延迟时间,提高了电路的稳定性和精确度,满足设计要求。
1 水的光学特性对成像的影响
水的光学特性包括水的吸收特性和散射特性。水对光的吸收程度在不同光谱区域是不同的,具有明显的选择性。研究表明,沿岸海水的光谱透射窗口为520 nm。在实验中,常用Nd:YAG脉冲激光器,输出波长为1.064μm经过调Q倍频得到532 nm的绿光。由于水对光的吸收造成光能量的损失,对于稍长距离的目标成像,应适当加强激光器的功率。
水的散射包括水本身的散射和水中悬浮颗粒引起的散射。水下成像系统中常采用脉冲激光,该激光脉冲在水下传输中会受到散射作用的影响,由于同一束光的光子在水体中的传输路径不同,引起了传输延迟,在时域上表现为脉冲的展宽。脉冲展宽对于单脉冲距离选通成像的影响较大,距离选通的要求之一,门延迟时间等于激光脉冲宽度,而激光在水下传输时发生展宽,因此需要知道具体展宽的程度。采用小角度逼近法和唯像法分别进行估算,但它们都具有局限性,对于实际应用中只具有参考价值。
2 水下距离选通同步控制原理
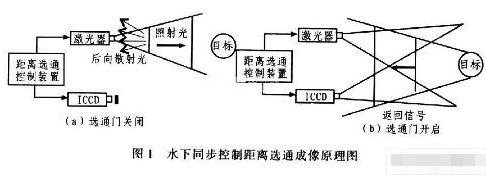
距离选通技术是通过脉冲激光器和选通ICCD摄像机在时序上正确配合,根据散射光返回的时间与目标反射光返回的时间不同,将摄像机的选通时刻正好设置在目标反射信号刚好到达ICCD摄像机时刻,选通后成像。水下同步控制距离选通成像原理图如图1所示,激光器发射很强的短脉冲,通过扩束,将目标的全部或者目标的关键特征部位照亮,由目标反射的激光返回到ICCD摄像机,当激光脉冲在往返途中时,ICCD摄像机选通门关闭,这样可以挡住后向散射光。当反射光到达ICCD摄像机时选通门开启,让来自目标的有用信号进入ICCD摄像机。选通门延迟时间与反射回来的激光脉冲一致,这样就可以大大减少后向散射的影响,提高回波信号信噪比。
3 水下距离选通激光成像同步控制装置
3.1 设计思路
水下激光成像系统中,由于水下的吸收严重,通常选用超短激光脉冲,又因为帧扫描周期为几十毫秒,无法与激光器同步,因此选用在CCD摄像机前加装选通像增强器,可以实现纳秒级选通。为了产生纳秒级的选通脉冲,需要有高频时钟信号,考虑到高频电路容易受外界噪声干扰及内部延时要小等问题,因此选用FPGA来完成设计。
理论上,假定距离延迟时间为T,激光脉冲在水下到目标并且从目标返回到接收器的距离为L,水下的相对折射率为n,光速为C,于是可得到T=nL/C;门延迟预设值为激光脉冲宽度。可是,由于水下环境比较复杂,要得到准确的相对折射率值很困难,同时,从前面分析可知,激光脉冲在水下传输时会发生展宽,所以不能直接通过计算得到准确的距离延迟和门延迟。
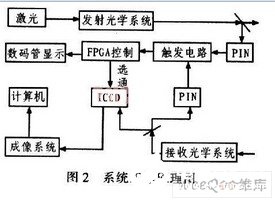
本设计对上述问题提出解决方案,其工作原理图如图2所示。工作时,激光器首先向水下目标发射脉冲激光束,由2个PIN管探测到的信号分别作为选通的起始信号和结束信号,该计数值可以通过电路中的数码管直观看出。当第二次发射激光柬时,以第一次测得的距离延迟为计数初值,还应考虑PIN管的响应时间、触发电路的延时和像增强器驱动电路的延时,提前输出选通脉冲。由于在水下传输过程中激光脉冲发生展宽,对于门延迟时间置数在未经传输前激光脉宽的基础上,不断增加门延迟计数初值,当得到满意的选通图像时,系统复位。
3.2 设计过程
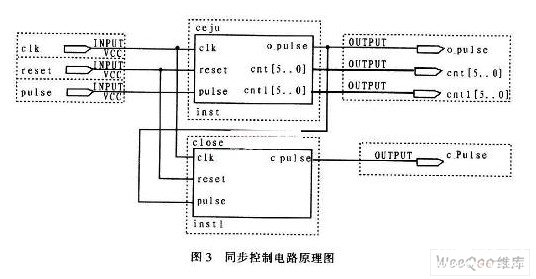
根据上述的设计思路,在实现过程中,选用了脉冲宽度为6 ns,重复频率为1 kHz的激光器,有效选通脉宽小于等于40 ns的像增强器,通过光锥耦合方式与CCD相连的IC-CD,速率可达到500 MHz的Ahera STraTIx III系列的FPGA,它是一种低功耗高性能的FPGA,步长可达到2 ns。同步控制的原理图如图3所示,该设计包含2个模块,第1个模块实现测距和定时计数的功能并且输出门开启脉冲,第2个模块实现定时功能产生门关闭脉冲。
当激光器发射第一个脉冲激光束时,经分光器分光后一小部分光被PIN管接收,将光信号经触发电路形成高电平信号,开始启动第一个模块的测距功能,其中一个计数器进行加计数而另一个计数器暂不工作。当从目标反射回来的光刚到达接收端时,放置在接收端的PIN管接收到信号,并通过触发产生测距停止的信号,测距的结果可通过数码管直观看出。
当激光脉冲发射第二个脉冲激光束时,由触发电路产生的高电平信号继续启动第一个模块工作,其中一个计数器以第一次计数值为初值开始做递减计数,当计数器减到零时,输出高电平脉冲作为选通脉冲,打开ICCD选通门,而另外一个计数器将做第二次测距工作,进行递加计数,作为下一次选通计数的初值。
当选通脉冲到来的同时启动第二个模块,由程序控制设定的计数初值作为起始值,计数器进行减计数,当计数减到零时,输出高电平脉冲关闭ICCD选通门,一次选通过程结束,等待下一个脉冲的到来。
3.3 仿真与分析
本设计仿真在Ahera公司的开发软件QuartersⅡ8.0中完成,使用Verilog语言对模块进行编辑。本文分别对两个模块进行仿真,仿真结果如图4所示。时钟周期为2 ns,pulse为触发脉冲,cnt为模块中一个计数器的计数值,cntl为模块中另一个计数器的计数值。o_Pulse为选通脉冲。程序中假定测出的距离延迟时间为8个周期。由图4可看出,cnt和cntl不断实现测距和计时功能,第一个触发脉冲到来,cnt计数完成测距功能而cnt1不工作,当接收到目标反射回来的触发脉冲时,cnt实现计时功能而cntl完成测距工作。此功能在程序中采用的状态机的方法实现。此仿真还考虑到触发延时和ICCD的开机延时,这些延时都可通过实验测得,在这里假定延迟为一个周期,如果没有考虑延迟,当cnt等于O时刻将输出一个开机脉冲,由图4可看出:该脉冲提前一个周期输出,实现精确计时。
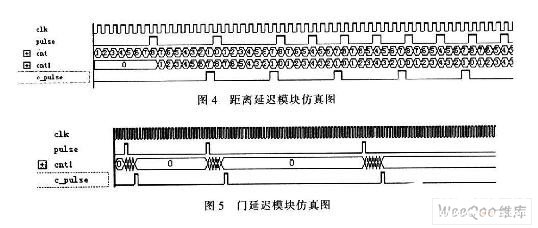
图5为门延迟模块仿真图。从图5可以看出,PULSE为开机脉冲,cntl为门延迟计时,当脉冲来,计数器开始计时。在仿真中考虑到脉冲在水下传输的延迟问题,因此门延迟的计数初值为基准,每来一个脉冲,计数初值加l,直到得到满意的选通图像为止。为了更加精确,程序中可采用阻塞赋值的方法产生微小延迟。
该设计将预置初值和计时统一起来,简化在实际过程中的人为操作,一旦脉冲激光束发射将自动完成选通工作。设计中使用的逻辑资源少,可以大大减小信号传输延时,对电路的稳定性能有较大提高。
4 结论
距离选通技术可以减小因后向散射产生的背景噪声,提高成像系统的信噪比,使成像质量得到较大提高,但需要严格控制时序才能有效实现。通过水下环境对成像质量的分析,阐述了在水下对激光成像中存在的问题。为了提高同步控制的精确度,采用了高性能的FPGA,产生纳秒级选通脉冲选通ICCD摄像机。传统的同步控制电路中,常采用预置和计数分开,将理论计算值作为延迟计数值等,对于环境比较复杂的情况下将出现较大误差。
本设计将测距思想引入该装置中,对于未知距离的目标以及不定距离的目标均能自动成像,广泛应用于对水下目标的探测和成像系统中。
责任编辑:gt
-
高能激光器控制方案:AWG 如何实现皮秒级抖动同步?2026-07-09 58
-
脉冲激光频域干涉技术在泵浦探测实验中的应用2010-05-13 2190
-
如何利用AD7888实现度激光器监测系统的设计?2021-04-20 2449
-
怎么实现CMOS数字摄像机内部控制系统的设计?2021-06-04 1780
-
MOPA脉冲激光器中的降功率频率点 2021-04-26 09:07 预计 8 分钟读完2021-06-11 7071
-
激光配件——脉冲激光电源的原理2010-07-01 1214
-
测距仪中新型的脉冲激光光源2010-11-23 931
-
仿真软件在脉冲激光器驱动电源设计中的应用2017-01-24 1127
-
CPLD在大电流窄脉冲激光器电源设计中的应用2017-11-09 1569
-
脉冲激光能量参数关系_脉冲激光器的能量换算2018-05-17 26702
-
微型集成化低功耗脉冲激光器电光调Q电路2021-06-30 1166
-
PLL-8XX-150脉冲激光器2023-05-06 707
-
准连续(QCW)激光器与连续激光器及脉冲激光器区别在哪?2021-12-08 15171
-
连续激光器与脉冲激光器:有什么区别?2025-04-27 2254
-
什么是脉冲激光器? 常见的脉冲激光器有哪些技术类型? 目前性价比最高的脉冲激光器是哪个品牌的? 市面2026-04-17 2819
全部0条评论

快来发表一下你的评论吧 !
