

opensbi下的riscv64裸机系列编程1(串口输出)
描述
opensbi下的riscv64裸机系列编程1(串口输出)
-
1.说明
-
2.opensbi的编译
-
3.基本环境的准备
-
3.1 准备qemu
-
3.2 准备交叉编译工具链
-
-
4.工程完善
-
5.封装的sbi接口
-
6.程序运行
-
7.printf函数的实现
-
8.小结
1.说明
前面的文章中已经提到了opensbi的作用不仅仅是一个引导作用,还提供了M模式转换到S模式的实现,同时在S-Mode下的内核可以通过这一层访问一些M-Mode的服务。
本文会从最小系统角度出发,利用opensbi的M-Mode的服务在控制台上输出Hello。
2.opensbi的编译
opensbi提供了三种引导启动模式
- FW_PAYLOAD
- FW_JUMP
- FW_DYNAMIC
那么这三种模式有什么区别呢?
FW_PAYLOAD
这种模式会直接将Opensbi固件与uboot等绑定在一起。
可以说这种模式是需要bootloader的。
FW_JUMP
这种模式会直接跳转到bootloader去执行。
这个对于qemu的启动模式来说十分的有用。
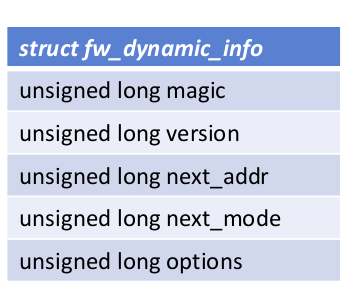
FW_DYNAMIC
这种模式跳转的时候会传递动态的参数
这里是通过寄存器a2传递了fw_dynamic_info结构体信息。
为了简化模型,目前只通过FW_JUMP方式进行跳转。
下载opensbi的代码
git clone https://github.com/riscv/opensbi.git
进行编译
export CROSS_COMPILE=riscv64-unknown-elf-
make PLATFORM=generic clean
make PLATFORM=generic FW_JUMP_ADDR=0x80200000
注意FW_JUMP_ADDR=0x80200000是指定的跳转地址。当然可以指定固件跳转到其他的地址。
生成fw_jump.elf位于platform/generic/firmware/fw_jump.elf。
3.基本环境的准备
3.1 准备qemu
可以到官网下载最新的qemu
https://www.qemu.org
解压后进行安装与编译。
tar xvf qemu-5.2.0.tar.xz
./configure --target-list=riscv64-softmmu
make
sudo make install
3.2 准备交叉编译工具链
可以到官网上下载对应的交叉编译工具链
https://www.sifive.com/software
准备交叉编译工具链
export PATH=$PATH:/opt/riscv64-unknown-elf-gcc-8.3.0-2020.04.0-x86_64-linux-ubuntu14/bin/
4.工程完善
相关的实验代码已经放到仓库
https://github.com/bigmagic123/riscv64_opensbi_baremetal/tree/master/01_startup
工程的目录结构如下:
.
├── build.sh ## 编译脚本
├── entry.s ## 入口函数
├── fw_bin ## 可执行的固件脚本
│ ├── fw_jump.elf ## opensbi
│ ├── hello.elf ## 编译完成的固件
│ └── run.sh ## 直接运行的脚本
├── link.ld ## 链接文件
├── main.c ## 主函数
├── readme.md
└── sbi.h ## sbi调用api
首先是编译脚本
build.sh
目前为了简化工程,暂时没有使用makefile文件。
riscv64-unknown-elf-gcc -nostdlib -c entry.s -o entry.o
riscv64-unknown-elf-gcc -nostdlib -c main.c -o main.o
riscv64-unknown-elf-ld -o fw_bin/hello.elf -Tlink.ld entry.o main.o
编译了entry.s和main.c文件,并通过link.ld文件进行链接。
link.ld
链接脚本规定了程序的布局
OUTPUT_ARCH( "riscv" )
OUTPUT_FORMAT("elf64-littleriscv")
ENTRY( _start )
SECTIONS
{
/* text: test code section */
. = 0x80200000;
start = .;
.text : {
stext = .;
*(.text.entry)
*(.text .text.*)
. = ALIGN(4K);
etext = .;
}
.data : {
sdata = .;
*(.data .data.*)
edata = .;
}
.bss : {
sbss = .;
*(.bss .bss.*)
ebss = .;
}
PROVIDE(end = .);
}
整体的链接脚本写在SECTION{ }包含的结构中。
其中*代表通配符,而.则表示当前的地址。当链接脚本需要使用的时候,可将其通过-T进行参数的传递。
entry.s
该文件描述了执行的入口函数。
.section .text.entry
.globl _start
_start:
/* setup stack */
la sp, stack_top # setup stack pointer
call main
halt: j halt # enter the infinite loop
loop:
j loop
.section .bss.stack
.align 12
.global stack_top
stack_top:
.space 4096 * 4
.global stack_top
最关键的是两点:
- 设置函数堆地址
- 跳转到main函数
stack_top:
.space 4096 * 4
.global stack_top
将栈顶设置,通过call跳转到c语言的main函数。
main.c
#include "sbi.h"
void main()
{
SBI_PUTCHAR('H');
SBI_PUTCHAR('e');
SBI_PUTCHAR('l');
SBI_PUTCHAR('l');
SBI_PUTCHAR('o');
SBI_PUTCHAR('
');
while(1) {}
}
这个程序会调用opensbi的函数,此时可以在S-Mode访问M-Mode的串口输出服务。
5.封装的sbi接口
可以通过下面的官方文档来了解其使用。
https://github.com/riscv/riscv-sbi-doc/blob/master/riscv-sbi.adoc
在进行M-Mode服务访问的时候,采用了ECALL进行系统调用。
在系统调用过程中,ecall会使用a0与a7寄存器。其中a7寄存器保留的是系统的调用号,而a0寄存器则保存系统的调用参数。返回值则会保存在a0寄存器中。
需要注意的是在RISCV的设计上,S模式不直接控制时钟中断和软件中断,而是使用ecall指令请求M模式设置定时器或在代理处理器中断。
所以opensbi在提供M-Mode服务的时候,到目前为止,opensbi提供的sbi服务接口有如下的表示:
| Function Name | FID | EID | Replacement EID |
|---|---|---|---|
| sbi_set_timer | 0 | 0x00 | 0x54494D45 |
| sbi_console_putchar | 0 | 0x01 | N/A |
| sbi_console_getchar | 0 | 0x02 | N/A |
| sbi_clear_ipi | 0 | 0x03 | N/A |
| sbi_send_ipi | 0 | 0x04 | 0x735049 |
| sbi_remote_fence_i | 0 | 0x05 | 0x52464E43 |
| sbi_remote_sfence_vma | 0 | 0x06 | 0x52464E43 |
| sbi_remote_sfence_vma_asid | 0 | 0x07 | 0x52464E43 |
| sbi_shutdown | 0 | 0x08 | 0x53525354 |
| RESERVED | 0x09-0x0F |
这里只使用了sbi_console_putchar接口。
接着看看具体的ecall的实现:
#define SBI_ECALL(__num, __a0, __a1, __a2)
({
register unsigned long a0 asm("a0") = (unsigned long)(__a0);
register unsigned long a1 asm("a1") = (unsigned long)(__a1);
register unsigned long a2 asm("a2") = (unsigned long)(__a2);
register unsigned long a7 asm("a7") = (unsigned long)(__num);
asm volatile("ecall"
: "+r"(a0)
: "r"(a1), "r"(a2), "r"(a7)
: "memory");
a0;
})
根据上述的解释,ecall采用的是内嵌汇编函数。
ecall
ii a0,101
li a1,0
li a2,0
li a7,1
这个内嵌汇编的展开形式如上面所示,a0、a1、a2表示传递的参数,a7表示系统调用号。
而根据内嵌汇编的语法,有着如下的格式
asm(assembler template
: /* output operands */
: /* input operands */
: /* clobbered registers list */
);
对于C语言来说,其函数的调用规则是处理器规定的,而编译器可以按照这种规则进行翻译代码。riscv的函数调用规则可以按照下面的文档进行操作。
https://riscv.org/wp-content/uploads/2015/01/riscv-calling.pdf
而对于main函数中的SBI_PUTCHAR其展开为
#define SBI_CONSOLE_PUTCHAR 1
#define SBI_PUTCHAR(__a0) SBI_ECALL_1(SBI_CONSOLE_PUTCHAR, __a0)
#define SBI_ECALL_1(__num, __a0) SBI_ECALL(__num, __a0, 0, 0)
可以看到通过ecall只传递一个参数。
6.程序运行
在fw_bin文件夹下输入./run.sh就可以运行看到效果了。
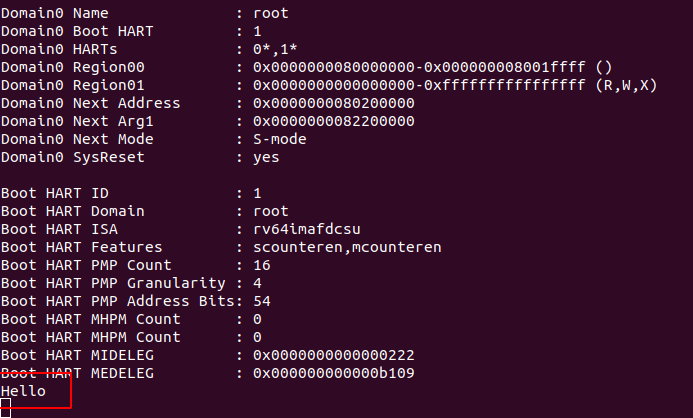
而这条操作的代码如下:
qemu-system-riscv64 -M sifive_u -bios fw_jump.elf -kernel hello.elf -nographic
对应的machine是sifive_u。bios是fw_jump.elf。
7.printf函数的实现
对于printf函数的使用很容易,但是深入了解其实现机制,发现并不简单,因为可变参数的特性使得其变得复杂起来。
实验代码如下:
https://github.com/bigmagic123/riscv64_opensbi_baremetal/tree/master/02_printf
看一个glibc中的prinf的实现机制。
#include
对于上述的定义
int printf(const char *format,...)
format表示固定的参数,...表示可变的参数。
主要的实现过程利用三个函数进行
va_start(p,format) //将指针p移到第一个变量参数
var=va_arg(p,变量类型)//已知变量的情况下,移到下个参数变量
va_end(p)//结束参数使用等价于p=NULL
这里为了实现方便,我直接使用开源的tinyprintf。
https://github.com/cjlano/tinyprintf
移植的过程也很容易,在main.c文件中作如下的实现:
#include "sbi.h"
#include "tinyprintf.h"
#define UNUSED(x) (void)(x)
static void stdout_putc(void *unused,char *ch)
{
SBI_PUTCHAR(ch);
}
void main()
{
init_printf(0, stdout_putc);
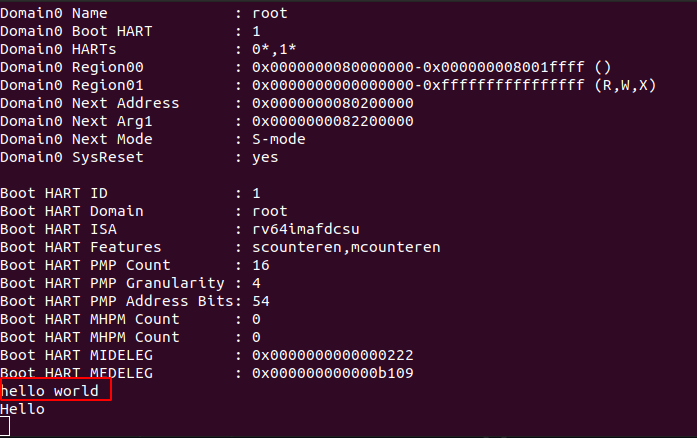
tfp_printf("hello world
");
while(1) {}
}
只需要移植init_printf接口就可以使用tfp_printf进行串口输出了。
结果如下:
8.小结
第一阶段实现了opensbi的启动流程,同时通过系统调用访问串口输出。已经实现了S-Mode下访问M-Mode的初步计划,并且通过串口进行基本的输出过程。随着工程的不断增加,后续会增加makefile工程组织,riscv下的中断处理、以及定时器中断的实现,下篇文章主要介绍这些。
责任编辑:xj
原文标题:opensbi下的riscv64裸机系列编程1(串口输出)
文章出处:【微信公众号:嵌入式IoT】欢迎添加关注!文章转载请注明出处。
-
debian-202308 映像不支持 firmware-realtek 包 riscv64吗?2026-02-26 474
-
全志D1开发板(哪吒 RISCV64)开箱评测2025-10-31 291
-
请问Openvino是否支持 Risc-V (riscv64) 架构?2025-06-24 323
-
基于OpenSBI的linux nommu实现2025-02-08 1556
-
全志D1开发板RISCV64开箱评测2023-08-16 1388
-
RT-Smart riscv64汇编注释2023-02-08 2450
-
如何一键生成支持riscv64的Debian rootfs?2021-12-28 2003
-
支持串口并口和USB(FT245B)PIC-Pgm 1.9.3.1全系列编程软件2021-12-20 1248
-
全志D1哪吒 RISCV64开发板上手评测2021-05-27 11421
-
opensbi下的riscv64裸机编程:中断与异常2021-01-07 4004
-
riscv64裸机编程实践与分析2020-12-31 5754
-
FX1SFX1NFX2NFX2NC系列编程手册2016-12-13 961
-
TOP系列编程器软件2008-12-27 9373
全部0条评论

快来发表一下你的评论吧 !
