

无人机实现精准抛投时会遇到哪些挑战及解决方案
军用/航空电子
描述
随着民用无人机技术的不断成熟与发展,无人机在水上救援中的应用越来越受到重视。无人机具有造价维护成本较低、起降灵活、操作简单等优势,目前在水上救援中已应用在人员定位搜救、远距离视频传输、投放定位和医疗救助设备等多方面,承担了监控、探查、寻找等工作。例如在收到海上人员落水报告后,无人机能够从最近的救援船艇上起飞,第一时间从空中发现并定位遇险人员的具体位置。
但从定位遇险人员到救援船艇抵达现场,可能需要很长的时间,期间无人机若能向遇险人员抛投救生圈等器材,可大大提高其获救的成功率。当然救生圈抛投的精准性也至关重要,遇险人员水中活动能力受限,如果救生圈抛投后离遇险人员太远,将无法起到救生能力。本文着重研究分析适用于无人机的救生圈精准抛投方案。
现有方案分析
自人类发明航空器以来,从航空器上抛投物体已被广泛应用在军事、民用等各个领域。下面将挑选多种典型的空投方案,详述其步骤,并分析其应用于无人机抛投救生圈的可行性,以及实现精准抛投时会遇到的挑战。
降落伞抛投
这种方式最早在军事领域被用于从大型固定翼运输机中抛出货物和载具等,可分为低空抛投和高空抛投。
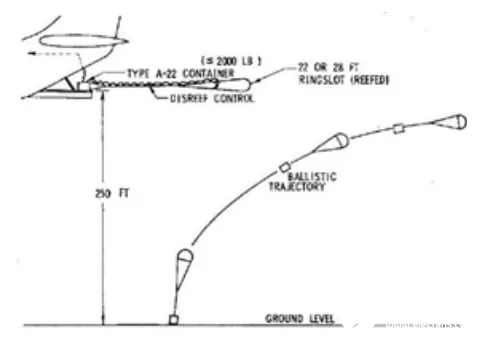
低空抛投中,首先固定翼运输机会下降至离地100米以下的高度,提前打开后货舱门,将紧缩的降落伞抛出至货舱外。当运输机到达预定的空投点后,完全打开降落伞,此时降落伞受到的空气阻力远大于固定货物的约束力,因此货物被拖拽出货舱,完成与运输机的分离,货物落地滑行后降落伞继续起到减速缓冲的作用。
在给定空速和高度后,这个方法被证实具有相对较高的精确性,90%的货物着陆在预定撞地点25英尺(7.6米)的范围内。当然需要强调的是,这一方法是为重量为500-2000磅(226-907千克)的货物设计的,而当利用固定翼无人机在视距外抛投救生圈时,由于此方法需要非常靠近水面,如何在无预先计划的条件下,保证无人机从巡航高度快速接近目标水面、抛投后及时爬升而不坠毁,是个不小的挑战。
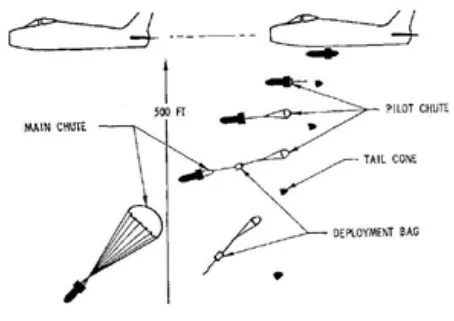
高空抛投中,当运输机达到预定空投点后,首先打开货物尾部的引导伞,进而拉开主降落伞,使货物在着陆前能缓慢下落。在军用领域中此方法能抛投的货物重量远低于前者,加上空中降落伞受阵风影响,精确度较低。实际案例说明运输机的飞行高度需要低于660米,否则空投将会散落在各处,甚至飘到数十公里远的地方。而用固定翼无人机空投时,由于抛投的物体重量非常轻,在用降落伞下落的过程中,阵风产生的影响更大,这将使精确度进一步降低。
以上是两种使用了降落伞的经典抛投模式,对固定翼无人机空投的应用具有一定的参考价值,但仍需解决低空飞行的安全性问题,或者降落伞落下时的精确度问题。
为了解决上述高空抛投模式中所遇到的精确度问题,可在降落伞上加装自主操控系统。军用领域例如GDS系统,它加装了GPS制导设备,并利用无人机上的监控设备,为翼伞投送系统编程,可自主克服下降时的阵风,向目标飞去,投放精度达30米。
民用领域在物流无人机上,也有案例在翼伞系统中加装了微控制器、三轴加速度、陀螺仪、气压传感器等,通过各种传感器参数实时计算并预测期望值,对翼伞进行控制,以实现精准空投。
对于这类自主制导的空投控制系统,虽可实现精准空投,但考虑到其控制系统的复杂性已经接近于一台微型无人机,成本较高,重量上连同待抛投的负载,也远超普通固定翼无人机的负载上限,因此尚不适合广泛地应用在无人机水上救援中。
滑索抛投
这一方法利用一端粘贴在固定翼航空器上的绳索来空投负载。
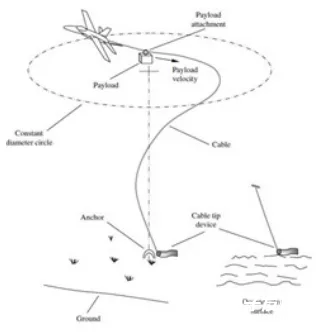
固定翼航空器拖着一根线缆在目标地区上空盘旋,这一结构的动力学特性会使线缆另一端自然向盘旋圆心接近。当线缆末端触碰地面时,末端上的锚钉确保其固定在陆地上;或者线缆末端接触水面后,利用末端高阻尼材料使其在水中基本静止。当线缆的拉力重量比足够高、线缆末端重量足够大时,整个系统将保持动态稳定,使得机载的物品可沿线缆滑降至地面或水面。
如果要将此方法运用在固定翼无人机上,可以尝试将救生圈放于线缆末端,起飞前将线缆卷缩在机舱内,当飞抵目标水面上空开始盘旋后放开线缆,使末端逐渐接近水面。这一方法的缺点是在以无人机盘旋轨迹为圆底、线缆末端为顶点的倒圆锥形空间内,不能有任何障碍物,否则可能会缠住线缆,使抛投失败,甚至拉扯无人机导致坠机。
空中释放并自由下落
这类方式最早在军事领域被用于从固定翼战机中空投炸弹,具体可细分为水平空投、俯冲空投和跳跃空投等。
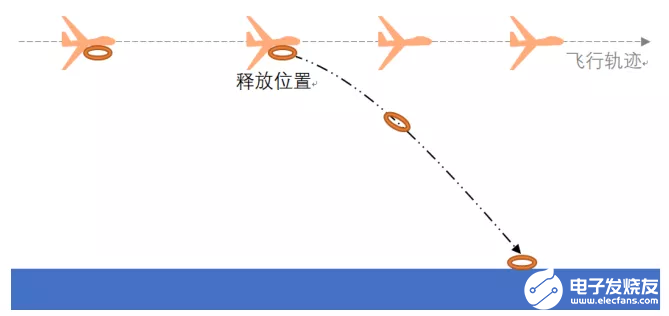
水平空投是指固定翼飞机在巡航高度保持与水面平行,在飞抵目标正上方之前,通过计算提前释放抛投物,使其沿着抛投轨迹自由下坠,最终落到预定目标位置。
如果无人机选用这一方式抛投救生圈,在实际执行时需要精确计算出固定翼无人机在巡航高度上的释放位置。被释放后救生圈的下落运动,可抽象为一个具有水平初速度的平抛运动,它在竖直方向上受重力和空气阻力,而水平方向上仅受空气阻力,因此可通过设计理论模型来计算下落时长和水平位移,并不断优化,从而推算出最佳释放位置。
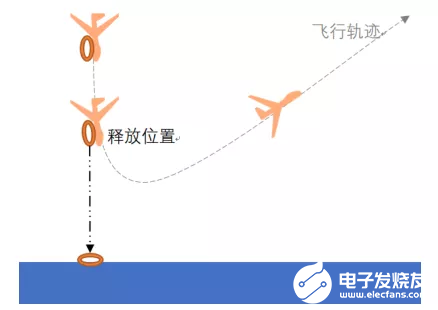
俯冲空投即首先固定翼飞机从较大高度接近目标上空,随后边瞄准边以超过60°的角度向其俯冲,在释放抛投物后,固定翼飞机随即拉起机身飞离,而抛投物则以接近直线的轨迹下落至目标。
这一方式几乎将原本水平空投中的水平初速度减小为零,因此大大提高了精确度。这一方式会遇到的最大挑战是固定翼飞机从俯冲状态改出时要承受极大的过载,虽然无人机系统免除了飞行员在过载中晕厥的问题,但无人机机身仍要承受这些过载。目前民用固定翼无人机一般将最大俯仰角限制在35°左右,离实施俯冲空投还有较大的差距。
此外,无人机在这一方式下需要通过机载摄像机和图传瞄准遇险人员,而用于瞄准的时间受限于俯冲高度,如果在一次俯冲中未能及时瞄准,只能放弃本次俯冲空投,拉升复飞后尝试下一轮俯冲空投。
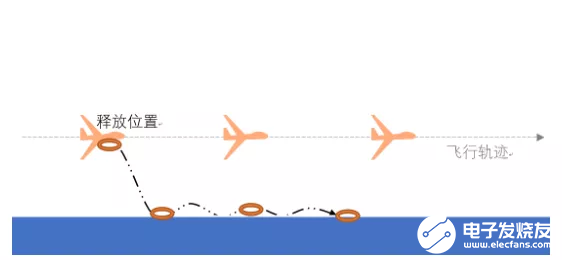
跳跃空投专用于在水面上实施抛投,它和降落伞低空抛投相似,只是去除了降落伞的缓冲。实施这种空投时,固定翼飞机需要提前下降至接近水面的高度,释放抛投物,由于具备一定的水平初速度,抛投物接触水面后会经历多次跳跃后停止。
这一方法面临的挑战与降落伞低空抛投相似,即在无预先计划的条件下,很难保证无人机从巡航高度能快速接近水面、抛投后能及时爬升而不坠毁。
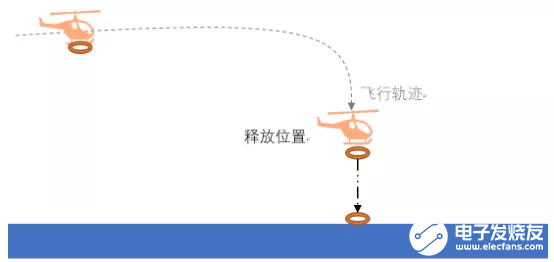
悬停空投是指旋翼飞机在飞抵目标正上方后先悬停,随后缓慢下降高度,同时保证没有较大的水平位移。在到达合适的高度后释放抛投物,使其自由下坠并最终落到预定目标位置。
这一方法比较容易控制抛投的精准度,与水平空投类似,抛投物被释放后的运动,可抽象为一个受到空气阻力的下落运动,它在竖直方向上受重力和空气阻力,而水平方向上仅受空气阻力,因此可通过建立理论模型来计算下落时长和水平位移的关系,并进一步计算出在不同风速下符合精准度要求的最大释放高度。
上文罗列了现有航空器抛投的多种典型方案,并分析了它们应用于无人机精准抛投救生圈的优势与挑战。
各类降落伞抛投方案,因为飞行安全风险大、抛投精准性过低或控制系统过于复杂等原因,尚不适合应用到无人机精准抛投救生圈上;滑索抛投因有线缆被缠后拉扯无人机的安全风险,当前也不适合用到无人机精准抛投救生圈上;
空中释放并自由下落的方案中,水平空投方案适用于固定翼无人机,而悬停空投方案适用于旋翼无人机。
但在实际应用中,两者都需要预先建立理论模型来计算救生圈下落时长和水平位移,从而推算出最佳释放位置或最大释放高度,以达到精确抛投的目标。
现有民用复合翼无人机结合了旋翼无人机的垂直起降和悬停能力,以及固定翼的巡航能力,其在实施救生圈抛投上具有很大的潜力:当发现遇险人员后,可以根据现场条件,选择水平空投或悬停空投,以提高抛投的精准性。
未来当出现了成熟的民用两栖复合翼无人机后,将带来全新的救生圈精准抛投方案:两栖复合翼无人机可在遇险人员上空悬停后垂直降落在附近水面上,再以船只形式逐渐靠近遇险人员,在其身边释放救生圈,并陪伴在人员附近,直至救援队伍抵达,这将进一步提高落水人员的救援成功率。
责任编辑:gt
-
无人机技术路线2026-07-10 487
-
离轴技术:赋能无人机精准配送的核心芯片应用2025-09-05 3235
-
第一集 知语科技无人机反制技术与应用--无人机的定义与分类2024-03-12 4748
-
基于RTK GPS和图像识别的无人机精准降落方案2022-07-04 4737
-
无人机云台是什么2021-09-01 10630
-
航模/无人机遥控的解决方案2020-07-03 3512
-
多轴无人机BLDC驱动解决方案2020-07-02 3426
-
AMEYA360设计方案丨通用无人机解决方案2018-10-25 1641
-
武汉无人机无人机比武演练,普宙O2当裁判2018-08-28 3072
-
Ameya360 无人机视觉、高级传感与处理解决方案2018-04-23 3976
-
SKYLAB详解无人机GPS模块的作用及无人机gps模块选型2017-06-22 7491
-
植保无人机供电系统解决方案2016-04-23 4997
-
无人机开发方案要领与电路图集锦2015-05-07 10543
-
无人机系统发展趋势与解决方案最新集锦2015-04-24 3410
全部0条评论

快来发表一下你的评论吧 !
