

一种低成本的机器人手臂,应用于在线机器人教育领域
电子说
描述
2020 被网友称为“魔幻之年”,说起魔幻现实主义,之前大火的斯皮尔伯格作品《头号玩家》为我们展示了虚拟即真实的“绿洲”世界。其中不仅有 VR 眼镜提供的沉浸式视觉体验,还有男女主角跳舞时用到的触感手套。而这样的交互方式已经诞生,Oculus VR 的两项专利就曾提及。
在赛博朋克式灵感降临的时代,除了这种可穿戴式机械装备,应用于多领域的多功能机械仿生装置也备受关注。
墨西哥蒙特雷科技大学(Tecnologico de Monterrey)的学者最近发明了一种低成本的机器人手臂,应用于在线机器人教育领域,使教师能够远程演示课堂上难以讲解的理论概念。关于此机器人手臂的详细资料以论文的形式发表在了 Hardware X 上。值得一提的是,这项研究是完全开源的,内部组件可以很容易地被全世界所有的教师和教育从业者组装起来。
新冠爆发期间,机器人手臂可以用来教授在线课程
“这项研究始于 2020 年 3 月新冠病毒爆发期间。”进行此研究之一的 Victor H. Benitez 表示,在学习了正运动学、逆运动学及其应用之后,他的两位学生提出了创建具有物联网功能的双连杆机械臂的想法,并同时作为他们机器人课程的研究项目。
新冠已被世卫组织宣布为“全球大流行”,这种病毒的爆发和广泛传播给教育机构带来了巨大的影响,并对学生和研究人员的生命健康造成严重威胁。对那些需要应用设备、协作实验的工科学生来说,传染患病的风险则更大。在这种情况下,大多数教育机构通过提供虚拟远程教育来减少感染病毒的风险。然而,实验室实践所要求的实验很难或根本不可能在虚拟环境中实现。当理论不能联系实际时,一种新型的、具备优秀演示教学效果的机械设备横空出世。
图 | 机器人在 SolidWorks 中的 CAD 绘制
机器人手臂可通过在线应用程序进行远程操作
机械臂是一种机械手,通常可编程,具有与人类手臂类似的功能。机械手臂的连杆可以看作是一个运动链,其运动链的末端称为末端执行器,类似于人手。末端执行器可设计为执行任何所需任务,如夹持、旋转等,具体取决于应用。在太空中,航天飞机遥控机械手系统(也称为 Canadarm 或 SSRMS)及其后续产品 Canadarm2 就是一种多自由度机械臂。这些机械臂已被用于执行各种任务,例如使用端部执行器上连接有摄像头和传感器的特殊部署吊杆对航天飞机货舱的卫星进行部署和回收。
机器人手臂可以是自主的,也可以手动控制的。机械臂可以是固定的,也可以是移动的(如轮式)。
Benitez 等人设计制作的开源机器人手臂系统有四个主要组成部分:机械手臂结构、控制系统、Wi-Fi 通信模块和人机界面。物联网机器人手臂可用于演示重要的机器人教学主题,如正运动学和逆运动学,这些主题通过使用 Denavit-Hartenberg(DH)方法编程,形成简单或复杂的运动方式进行操作展示。机器人系统的功能通过物联网技术来实现,物联网技术由一个可通过 ESP32 微控制器的无线 Wi-Fi 通信装置部署在智能手机中的 HMI 接口中。
Benitez 对此解释说:“我们的机械臂是运动学的应用。直接运动学应用于使用关节角度值的矩阵来确定末端效应器的位置。间接运动学则主要提供三角方程,建立长度和角度之间的关系,以计算末端执行器在空间中到达给定点或轨迹时,手臂关节需要移动的路径。”
机械臂将末端执行器(即感兴趣的对象)移动到特定位置所需的轨迹由特定坐标或参数函数确定。在这种情况下,末端效应器可以是手臂试图移动的任何对象,例如记号笔、激光或机器人夹持器。
具体来看,该机器人手臂可以通过手机上的人机界面控制,利用 Denavit-Hartenberg 参数移动各伺服电机的角度,得到其正运动学矩阵并确定其位置。此外,该接口还可以通过一个按钮,引入机器人遵循的复制协议,通过链接之间的几何关系,使用反向运动学复制运动轨迹。为了进行演示,Benitez 团队选择了以下图案:一个圆形、一个五瓣花和一个用手画的螺旋,并用一个开源的 MATLAB 代码进行处理,这样机器人手臂就可以跟踪它的轨迹。利用 MATLAB 对机器人的运动方程进行测试,仿真了机器人在物理样机中所遵循的特定尺寸和轨迹。为了使程序能够作为一个开源项目访问,并使控制器适合无线通信,Benitez 团队采用了与 Arduino IDE 兼容的 MATLAB 代码。
为了让教师和学生可以通过互联网使用同一只机器人手臂进行实验,它还被允许连接到 WiFi,并能通过在线应用程序进行远程控制。此外,它所基于的程序允许用户轻松访问手臂运动背后的每个命令和参数,这可以进一步支持学习,增强每个学生对机器人行为过程的理解。
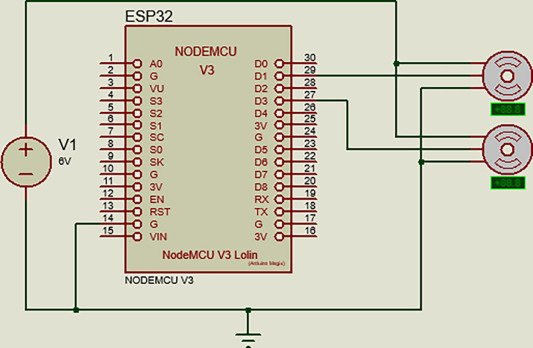
图 | 机器人的电气图
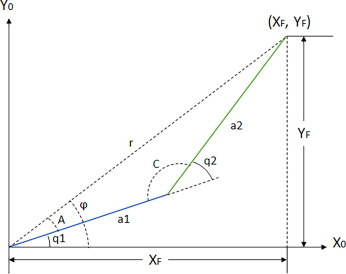
图 | 机器人逆运动学分析
低成本打造,硬件成本 28.48 美元
此次开发的机器人手臂,旨在使用廉价的组件演示正运动学和逆运动学应用。其运动控制是通过一个物联网接口与低成本和低功耗微控制器集成来实现的。与其他现有的机械臂相比,这种机械臂具有较低的生产成本。
也就是说,Benitez 和他的学生们制造的是一种大众可负担的机器人,这种机器人手臂在实验室外就可以轻松组装,不需要多么先进的工具和设备,就可巧妙的展示物理环境中的复杂机器人概念。
由于该机器人的低成本打造,其硬件成本仅有 28.48 美元。相较于它的功能来说,可以算得上物超所值了。它的链接是由聚乳酸长丝制成的,打印每个链接所需的材料量很低。由于使用的材料量是最小的,伺服电机可以提高在原型中使用的组件的重量。
演示理论概念的高效工具
Benitez 和他的学生们用事实表明,使用价格合理的电子元件和执行器制造一个有用而高效的机器人是可行的。当研究人员评估他们的机械臂时发现,无论是在实验室还是远程,它都是演示理论概念的高效工具。世界各地的教育工作者很快就可以开始使用它来更好的吸引学生,为课堂上涉及的理论主题提供切实的示范。
Benitez 说:“目前,在我们的帮助和推荐下,一个学生小组正在开发这种机器人手臂的第二个版本。他们将对机器人进行升级,并在不牺牲其优势(低价格、物联网集成、教育目的)的前提下提高原设计的性能和可靠性。我们的目标是在价格和实用性之间取得平衡,使这个项目能够以多种不同的方式进行应用。”
责任编辑:lq
-
如何创建FPGA控制的机器人手臂2023-10-24 2747
-
浅谈儿童陪护机器人2023-05-11 1183
-
制作一个教育机器人2022-08-19 2566
-
设计一种可用于大学和学校教授机器人技术的机器人2022-07-25 1936
-
机器人是什么?2022-03-31 22318
-
如何去实现一种基于传感器的机器人手术系统设计2021-09-28 2321
-
多轴机器人的发展趋势2020-07-29 7516
-
机器人群控系统应用于两种机器人队形变换2019-06-27 2808
-
工业机器人在五个领域的应用2019-03-06 2937
-
教育机器人方兴未艾,你了解多少?2018-12-20 4959
-
桁架机器人操作注意守则2018-09-27 2955
-
机器人的主要技术参数2017-08-15 7550
-
国产机器人步履维艰,谋者转战教育领域2015-12-07 6005
-
工业机器人的基本结构2015-01-19 9568
全部0条评论

快来发表一下你的评论吧 !
