

一种可携带线缆驱动的踝关节外骨骼
电子说
描述
34 岁 MIT 博士后杨兴帮的人生格外 “硬朗”,他生于年平均气温仅有 3.3℃ 的黑龙江省绥化市,本科和博士(直博)均毕业于北航。目前已经身为人父的他,谈及今年夏天结束博后研究时去向,答案只有四个字:回国任教。
而他的研究领域也很硬 —— 康复辅助医疗,去年其作为通讯作者在《信息与电子工程前沿》(Frontiers of Information Technology & Electronic Engineering)上,发表了以《可实现跖屈 - 背屈双向运动辅助的线缆驱动可携带式踝关节外骨骼》(“An untethered cable-driven ankle exoskeleton with plantarflexion-dorsiflexion bidirectional movement assistance”)为题的论文。
论文介绍了一种可携带线缆驱动的踝关节外骨骼(下称 “外骨骼”),他告诉 DeepTech,该设备主要面向踝关节功能未完全受损的足下垂患者,目的是通过机械训练让其恢复健康。
图 | 可携带线缆驱动的踝关节外骨骼
由于脑卒中、脊髓损伤或外伤等原因,足下垂患者的脚尖会不由自主地往下拖,稍不注意就会走路跌倒,进而引起关节损伤。而外骨骼拥有双向运动辅助功能,可通过主动控制把患者脚尖拉起来,从而保障正常行走。
杨兴帮表示,外骨骼的目标是让用户穿上后,能获得走路所需的关节力矩(力对物体作用时所产生的转动效应的物理量),同时提供正常的矫正步态,理论上患者不用出力就能正常行走。
外骨骼有七公斤重,主包含四部分:脚踝外骨骼、电源输出模块、线缆传输系统、传感及控制模块。
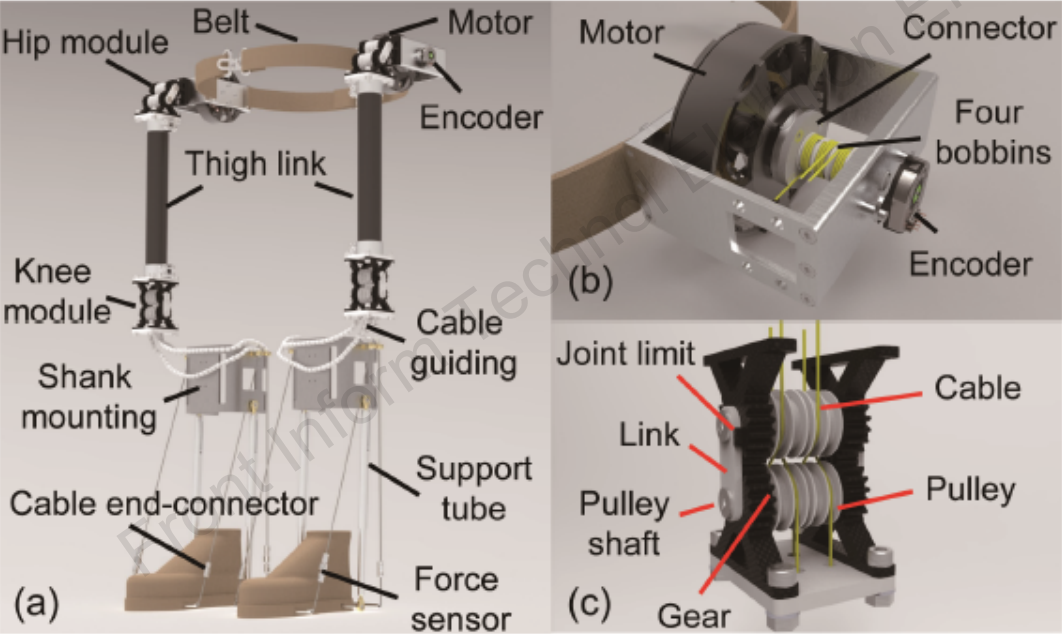
图 | 脚踝外骨骼(a)的概述、电源输出模块(b)的概述以及线缆传输系统(c)的膝部模块的详细示意图
第一部分是脚踝外骨骼,是外骨骼的主要执行部分,其主要作用在脚上,上部与一些管件连接,这些管件是线缆传递动力的通道,可对下肢起到保护作用;
第二部分是电源输出模块,内含 22.2V、容量为 5300mAh 的锂电池;
第三部分是线缆传输系统,负责将电机动力传递到末端,从而为脚步踝关节运动提供动力,并能起到辅助换向作用;
第四部分是传感及控制模块,主要通过足底压力传感器和 IMU( Inertial Measurement Unit,一种与人体兼容的传感器)实现步态实时识别,并通过控制系统按照脚踝输出力矩的规律,来提供仿生力矩从而辅助患者运动。
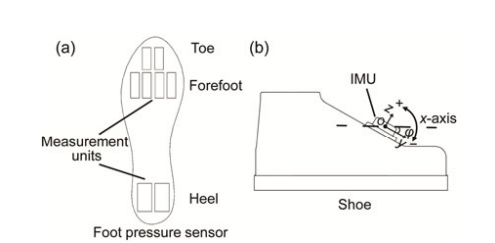
图 | 足部压力传感器(a)的脚趾、前掌和脚跟的测量单位以及 IMU(b)的放置
具体工作时,主要涉及到以下步骤:首先,线缆会把动力从系在腰部的电机传递到脚部踝关节;其次是步态信息采集和识别,该设备采用足底压力传感器和 IMU 相结合的方式来采集行走信息,通过数据融合实现行走步态的实时识别;随后,控制模块将信息进行处理和分析,进行步态预测、并按照实时步态的特定时刻,来提供与脚踝力矩相同的辅助力矩,使设备力矩输出与人体步态实时结合,从而实现更好的人机相容。
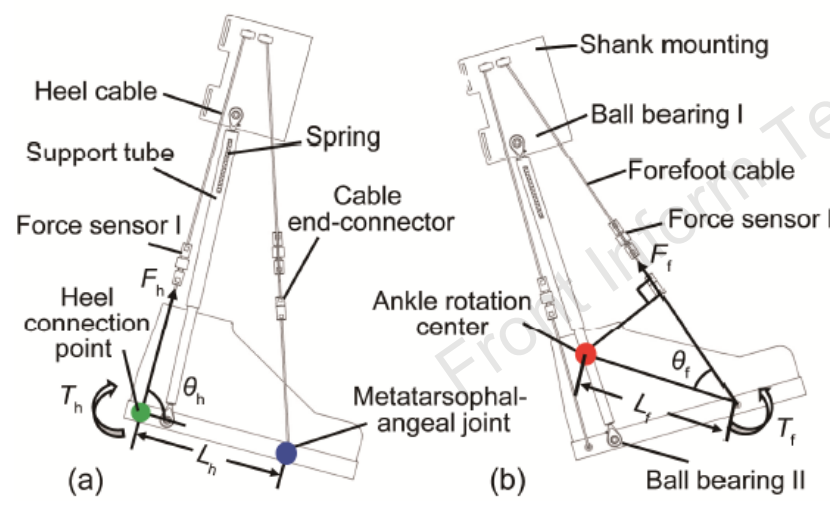
图 | 外骨骼在矢状面上踝关节运动的受力和运动分析
比如,用户在某一步态时刻所需要的踝关节力矩,都可根据自身需求及脚踝力矩数据设定好,此外外骨骼还能根据行走步态、将助力曲线轮廓做实时变化,也能通过历史步态规律来实时预测当前步态。
双向运动设计 + 腰部负重线缆系统,用户佩戴更轻松
相比此前多数同类设备,外骨骼可实现双向运动辅助。人体脚踝的双向运动,指的是踝关节可以朝两个方向运动,脚平时可以往上或往下转动,往上转动叫背屈,往下转动叫跖屈。
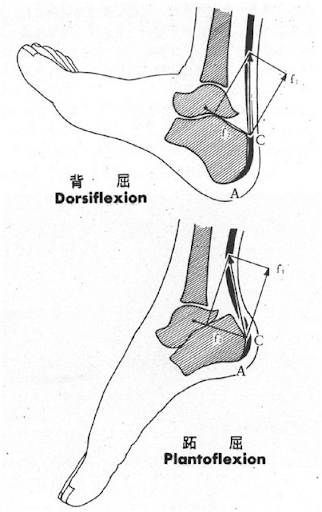
图 | 背屈和跖屈
此前也有设备可做双向运动辅助,但设备普遍较重,因为它们大多把电机装载在末端即靠近脚踝处进行驱动,这样末端附加的转动惯量就会比较大,用户要消耗力气也更大,设备对末端的控制精度也会打折扣。
基于此,该团队提出了线缆驱动方案,通过脚跟和前掌的 4 根线缆提供动力、配合齿轮 - 滑轮换向结构以及运动控制,实现了踝关节跖屈 - 背屈的双向运动。优点在于可将主要质量集中在身体近端,减小身体远端的质量,从而减小附加转动惯量,佩戴起来更轻更舒适。
而双向运动辅助的好处,是能提高脚踝辅助功率,其原理是人脚在行走过程中,肌肉做功虽然主要在跖屈阶段,但在脚离地摆动阶段,也会有一个背屈运动,如果加一个辅助力,就能让人更省力。
值得一提的是,外骨骼的主要动力部件集中在腰部,通过线缆传输系统将辅助力传递到脚步。这样做的好处是可以减少身体末端负重,因为身体下端负重越大,附加转动惯量越大,佩戴就越不舒服。
比如,一些运动员为训练腿部肌肉,会在腿部或腰部穿沙袋,正是为了增加末端负重,增加肌肉训练强度。末端负重越大、力臂就越长,驱动负载所需的力矩也就越大,但对正常人来说,这个力矩其实是多余的,反而会增加穿戴者的能量消耗。
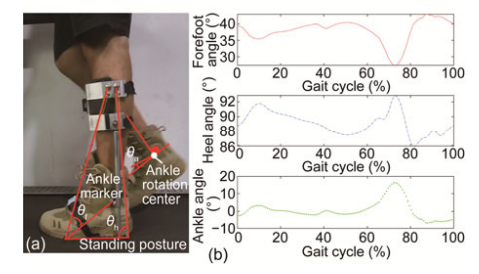
图 | 测量前脚拉索角 θf、后跟拉索角 θh 和脚踝旋转角 θa
从人体功效设计角度来说,将重量都放在人体近端,远端少放一点,那么脚部外力(惯性力)就会更小,抬脚也比较省事。因此,减少多余的转动惯量,为的就是减小人体做的无用功,从外骨骼角度来说,还能减小外骨骼的功耗并提高控制效率及精度。一言以蔽之,如果不想让用户自己去克服,那就需要让机器来克服。
为测试设计效果,在无 EXO(外骨骼)、有 EXO 断电和通电三种条件下,受试者佩戴上外骨骼后的小腿比目鱼肌运动量分别有所不同。当受试者穿着助力功能开启的外骨骼时,比目鱼肌的活动比不穿外骨骼时减少了 5.2%,比穿戴助力功能关闭的外骨骼时节省了 16.7% 的能量。
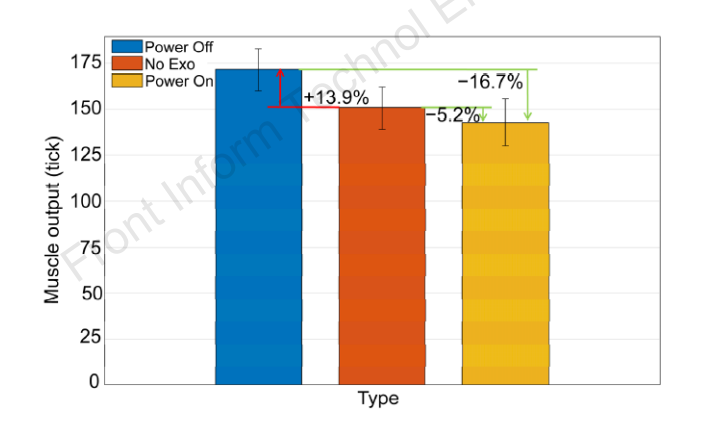
图 | 测试效果
在设备研发过程中,该团队专门研发出力反馈控制算法,还开发出了识别步态状态的仿生控制功能。仿生控制可追踪生物脚踝力矩,只有知道用户的具体步态时刻,才能在确定的步态时刻给到特定值。同时,只有知道特定步态和特定时间点的力,才能判断外骨骼需要在何时给力,这一过程就叫人机步态同步。
在测试中,一位 22 岁的佩戴者穿上外骨骼,就可实现在跑步机上行走。杨兴帮说,未来外骨骼有望实现让用户在跑步机上跑步。长远来看,外骨骼也可对任意健康人群施加行走助力和跑步助力,但考虑到速度和冲击的影响,还需在结构和功率上加以改进。
图 | 佩戴外骨骼在跑步机上行走
博后跟随 MIT 仿生义肢权威休・赫尔,数月后即将学成归国
杨兴帮的博后导师是休・赫尔(Hugh Herr),后者是 MIT 媒体实验室生物机械电子组的负责人。谈及来到该小组做研究,他说自己发邮件和赫尔联系过几次,对于赫尔研究的康复辅助设备他也非常感兴趣。与此同时,北航目前也在全力支持生物医学的发展。经过面试后,杨兴帮顺利来到该实验室。
图 | 麻省理工学院(MIT)教授休・赫尔
赫尔是 MIT 的终身教授,17 岁时因爬山遇暴风雪双腿冻伤而截肢,然而他并没有一蹶不振,悲天悯人,此后多年他不仅自研假肢继续攀岩,还成为仿生义肢的科研领军人物,并成立公司落地了多款产品。能跟着如此重磅的导师做科研,对于杨兴帮未来归国任教,一定会大有裨益。
2021 年 8 月,杨兴帮即将结束博士后研究,他表示到时肯定会回国任教,以及继续研究仿生机器人和康复辅助医疗。
现在虽然他人在美国,但也在远程协助北航的导师带学生。这位博后爸爸,有一个 2 岁半的儿子。对于几个月后回国发展,这位家乡位于东北的学者有着自己的愿望:“在教学上,我比较喜欢分享自己的所学和所感,也比较喜欢将自己所知教授给学生;在科研方面,我比较享受科研成果产出所带来的乐趣,希望能研究出造福于运动缺失患者的技术;从国家需求方面,我很愿意投身生物医疗相关技术及康复设备的研究。也就是希望在满足国家需求的同时,还能结合自己的兴趣做出一些成果来实现自我发展。”
责任编辑:lq
-
机械外骨骼传感器采用压力传感设计2016-04-27 0
-
继续:外骨骼压力传感器测试22016-05-06 0
-
浅析外骨骼机器人技术2019-04-28 0
-
【MAX40056申请】外骨骼助行器2019-09-19 0
-
怎样去设计一种基于虚拟现实的运动跟踪功能的上臂外骨骼2021-09-01 0
-
从科幻走进现实的可穿戴外骨骼2016-02-15 2807
-
日本Skeletonics外骨骼套装开售 穿上就变高达2018-04-09 3853
-
外骨骼研发设计应以使用者为出发2018-05-25 1739
-
研究一个外骨骼结构提供的解决方案2019-08-19 5498
-
面向踝关节功能的三维测量与重建系统设计2021-03-16 754
-
外骨骼传感系统方面研究的新突破2021-06-01 2353
-
外骨骼机器人的概述与分类2023-08-30 1204
-
「黑科技」探索外骨骼机器人的创新之旅2023-09-12 574
-
步行助力外骨骼机器人2024-11-16 698
全部0条评论

快来发表一下你的评论吧 !
