

移动机器人目前的五大发展趋势
描述
编者按:正如德国工业4.0之父孔翰宁曾指出的“人工智能是工业4.0成败的关键”,随着人工智能技术的发展,工业智能成为了不少AI企业关注的焦点。在这之中,作为工业智能化一大标志的工业机器人是发展落地的重点之一。
旷视在2017年进入供应链物联网领域,聚焦智慧物流及工业机器人业务。2020年初,机器人产品部独立成为旷视的产品中台之一,专注于机器人产品和关键物流装备的研发。在2021年到来之际,旷视高级副总裁兼机器人产品部总经理王宏玉、旷视机器人产品部研发总监陶涛发表署名文章,分享了他们对移动机器人技术趋势的观点。
近年来,随着消费需求日趋个性化、用工短缺/劳动力成本上升、新一代信息技术不断成熟等多重因素的推动,智慧物流、智能制造成为企业降本增效提质的重要手段,带动移动机器人市场需求的持续走高。根据中国移动机器人产业联盟、新战略机器人产业研究所数据统计,2019年度中国移动机器人市场规模达到61.75亿元。
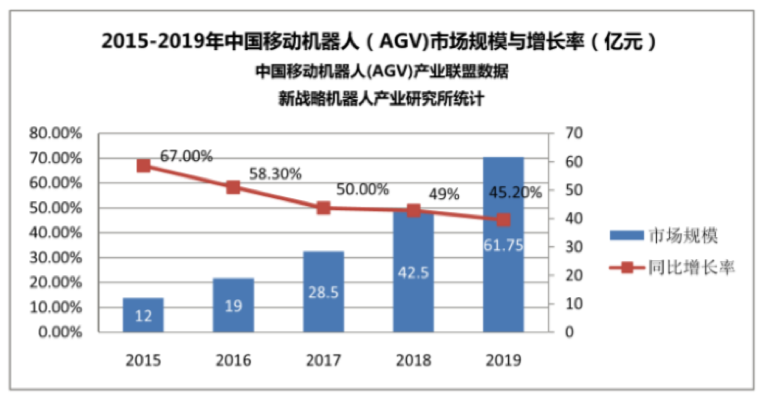
2019年度中国移动机器人市场规模达到61.75亿元(来源:中国移动机器人产业联盟《2019-2020 中国移动机器人(AGV)产业发展研究报告》)
移动机器人主要需要解决定位、规划、控制等问题,目前重点的研究领域包括环境感知与建模、定位与导航、环境理解、多机器人协调等,根据旷视在工业智能及智慧物流方面的研发和实践积累,我们看到移动机器人目前主要有以下五大发展趋势:
1 基于SLAM技术的AMR是未来机器人的主流趋势
移动机器人发展经历了有轨方式(如磁带牵引方式)、信标方式(如二维码)、无信标方式(如SLAM:Simultaneous Localization and Mapping,即时定位与地图构建)的不同阶段。二维码导航机器人需要在现场张贴二维码,对二维码粘贴精度要求高,且易损坏。SLAM技术可以让机器人在无信标的情况下也能实现定位导航,具有易部署、柔性等特点,更加适合在运行环境复杂、业务经常变动的场景下应用,因此受到越来越多客户青睐,正在成为业界主流趋势。
行业发展显示,导航技术的发展使设备从“车”逐渐过渡到“机器人”。AGV(Automated Guided Vehicle,自动引导车)最早是传统企业自动导引车的模式,智能化程度不高。随着新技术的发展,AGV自主化、智能化的程度越来越高,企业纷纷朝着AMR(Automated Mobile Robot,自主移动机器人)的方向发展,越多越多人开始用AMR来取代AGV的说法。
2 视觉SLAM是未来方向,同时需要多传感器融合的导航方式
在工业物流领域,基于SLAM技术实现的机器人自主导航,根据传感器不同主要分为两个类别:激光SLAM和视觉SLAM。激光SLAM技术相对更加成熟,是当前市场应用的主流。但随着机器人单体主处理器的处理能力提升,特别是一些带GPU(Graphics Processing Unit,图形处理器)、NPU(Neural-network Processing Unit,嵌入式神经网络处理器)的处理器的应用,机器人视觉处理能力得到极大提升,以深度学习技术为核心的视觉处理可以在机器人上实现。
目前,视觉技术已经被广泛地应用到机器人立体视觉避障(人/ 物区分识别),以及视觉导航和末端高精定位上。旷视认为,视觉传感器成本低,感知信息量大,随着视觉算法技术的成熟,视觉SLAM导航机器人在不远的将来会替代激光SLAM导航机器人。

旷视MegBot-S800V视觉导航及视觉建图演示
与此同时,不管是基于激光还是视觉实现的机器人自主导航,都不是单一应用,还需要融合诸如惯导(IMU)、GPS等其他导航方式,以应对鲁棒性要求非常高的现实应用场景,让机器人能够更加稳定有效地运行。(来源:中国移动机器人(AGV/AMR)产业联盟《2020-2021工业制造领域自然导航AGV/AMR产业发展研究报告》)例如视觉和IMU的融合,IMU为快速运动提供了较好的解决方式,而相机又能在慢速运动下解决IMU的漂移问题,二者实现了优势互补。
3 深度学习将广泛应用,加强机器人对周围环境的理解
AI中的深度学习技术在计算机视觉中的应用主要有物体识别、目标检测与跟踪、语义分割、实例分割等,语义SLAM能把物体识别与视觉SLAM结合起来,将标签信息引入优化过程中,构建带物体标签的地图,实现机器人对周围环境内容的理解。
新技术与机器人技术的加速融合将进一步推动产品的更新换代。移动机器人的自主性主要体现在“状态感知”、“实时决策”、“准确执行”这三个方面。物联网、AI、5G等新一代信息技术与机器人技术相互结合,能够让设备高效交互,数据更加自由流动,并通过算法指挥硬件发挥最大效能。(来源:中国移动机器人(AGV/AMR)产业联盟《2020-2021工业制造领域自然导航AGV/AMR产业发展研究报告》)
4 机器人规模化集群作业成为必然,需要更高效的多机协作方式
机器人在实际应用中,通常是以集群的方式协同完成特定的任务。如:月台的托盘搬运集货,原材料的料箱存储和拣选,产线之间的物料搬运;托盘可以使用无人叉车搬运,原材料的存储拣选可以使用二维码类KIVA机器人,产线之间物料搬运可以使用SLAM机器人。
在旷视看来,多台甚至是成百上千台机器人规模化集群作业成为发展必然。这不仅需要调度系统需要能够接入各种类型的机器人,在统一的环境下完成作业调度;还需要多机器人调度算法,找到全局最优方案,使多机器人共同工作时的总效率最高。目前调度算法主要分为三类:数学方法、仿真方法和人工智能算法。其中,人工智能算法前景最为远大。
例如,当系统只需要调度几十台机器人时,传统系统依靠简单的逻辑策略就能支持。然而,一旦达到几百台甚至上千台机器人时,简单的逻辑思考已经不能解决问题,整个群体协作的效率无法得到有效保证。这时候就需要机器人能够不断学习、不断修正自身策略,AI将在其中扮演重要角色,让整个系统不断优化,群体智能化程度越来越高。
5 同构仿真、数字孪生,为客户提供一站式服务
客户在做智能化、自动化改造的过程中,从方案设想,到方案设计和实际投入,中间会经过漫长的决策链,通常这个决策过程依赖设计人员的经验,这样可能会导致规划结果和实际需求产生较大的偏差,导致浪费或工期延误。
一套功能完备的同构仿真系统可以避免设计过程中的人为偏差,并且能够极大提高评估效率。例如旷视自主研发的机器人网络操作系统河图(HETU),可以提供规划、仿真、实施、运营等一站式解决方案,实现同构仿真和数字孪生,极大减少机器人项目规划风险,提高运维效率。
旷视河图数字孪生演示视频
数字孪生中最关键的在于仿真,而仿真里关键的是同构仿真。目前物流行业中,大多数仿真系统和执行系统都是分开的。而旷视河图采用同构仿真的方式,仿真和执行在同一套系统和软件里,仿得更好、更加体系化,随着软件的更新迭代可以无限逼近现实场景,带来更大的价值。
在旷视看来,移动机器人未来的主要技术发展趋势可以概括为单体智能和群体智能:单体智能是单个机器人的智能化程度,未来会包含更多AI的元素;群体智能是系统的智能化,通过AI的算法使系统最优化,为客户降本增效。移动机器人的市场很快就会突破100亿的规模,未来的市场是1000亿的体量,国内的很多同仁在为这个市场而努力拼搏,旷视的产品也在不断走向海外,在海外这个蓝海市场赢得一席之地。
责任编辑:xj
原文标题:解读移动机器人的2020:规模化集群作业成发展必然,深度学习将广泛应用
文章出处:【微信公众号:Megvii旷视科技】欢迎添加关注!文章转载请注明出处。
-
详解移动机器人软硬件系统问题2021-11-11 2531
-
移动机器人的三种主要运动系统2021-09-01 2208
-
什么是移动机器人软硬件系统问题2021-08-06 2468
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 2967
-
DSP的五大发展趋势2021-02-19 2881
-
2021年人工智能产业五大发展趋势2021-01-22 10599
-
移动机器人行业发展现状与未来发展趋势2020-12-25 10481
-
如何实现移动机器人的设计?2020-11-23 3276
-
机器视觉的五大发展趋势2019-06-08 7103
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4088
-
移动机器人的分类与移动机器人技术研究现状和未来发展的分析2017-09-16 1597
-
Labview My RIO 移动机器人2016-08-21 13519
-
资料:移动机器人能否自动充电?2016-01-20 5129
-
移动机器人常用传感器2012-08-20 6789
全部0条评论

快来发表一下你的评论吧 !
