

以树莓派作为大脑 3D打印的蜘蛛机器人
电子说
描述
这个四足蜘蛛机器人以树莓派作为「大脑」,身躯和四肢由 3D 打印。无需定制电路板,初学者即可完成组装。不仅如此,教程还包含一段将近一个小时的组装视频。这对于想了解树莓派、Python 编程的朋友来说是非常不错的上手项目。
组件清单
Raspberry Pi 3B+/4B × 1
500万像素 OV5647 Pi 摄像头模块 × 1
POWERADD 5000mAh 电源 × 1
PCA9685 16 通道 12 位 PWM 伺服电机驱动 × 1
LM2596 降压转换器 DC-DC 降压模块 × 1
MG90S 伺服电机 × 12
3.7v 锂电池(700mAh) × 4
拨动开关 × 1
跳线 × 若干
M3螺母和螺栓 × 若干
3D 打印组件
需要打印的零件清单:
1 x Body(身体)
1 x Joint 1(关节1)
1 x Joint 2(关节2)
1 x Joint 3(关节3)
1 x Joint 4(关节4)
1 x Thigh 1(大腿1)
1 x Thigh 2(大腿2)
1 x Thigh 3(大腿3)
1 x Thigh 4(大腿4)
1 x Calf 1(小腿1)
1 x Calf 2(小腿2)
1 x Calf 3(小腿3)
1 x Calf 4(小腿4)
1 x 树莓派摄像头支架
1 x 上盖
4 x 足尖(粘)
4 x 足尖(光滑)
每条腿由三个部分组成:关节、大腿、小腿。为了便于组装,STL 文件都做了命名和编号。
可在本项目文件库下载:
https://make.quwj.com/project/349
使用 PLA 材料,3D 打印所有的文件。你可以一次打印所有关节的零件,大腿和小腿也可以一起打印,如图所示。而打印身体、关节、大腿、摄像头支架在打印时需要支撑。
安装树莓派
推荐使用 2GB 内存以上的树莓派 + Raspberry Pi OS 桌面版。为树莓派安装好系统,参考:
https://shumeipai.nxez.com/2019/04/17/write-pi-sd-card-image-using-etcher-on-windows-linux-mac.html
通过配置 WiFi,让树莓派接入网络,参考:
https://shumeipai.nxez.com/2017/09/13/raspberry-pi-network-configuration-before-boot.html
开启 SSH,使用 PuTTY 登录树莓派终端。传输文件和电影可以通过 SFTP,使用 FileZilla 即可。
开启 VNC 并使用 VNC Viewer 来登录树莓派,参考:
https://shumeipai.nxez.com/2018/08/31/raspberry-pi-vnc-viewer-configuration-tutorial.html
组装机器人
组装全过程视频。(视频长 51 分钟,请酌情切换到 WIFI 下观看)
特别说明:
1、某些零件可能需要进行打磨才可以装配在一起。你不一定完全依照视频中的步骤组装,不过建议先测试好电路部分,测试好之后再组装 3D 零件。
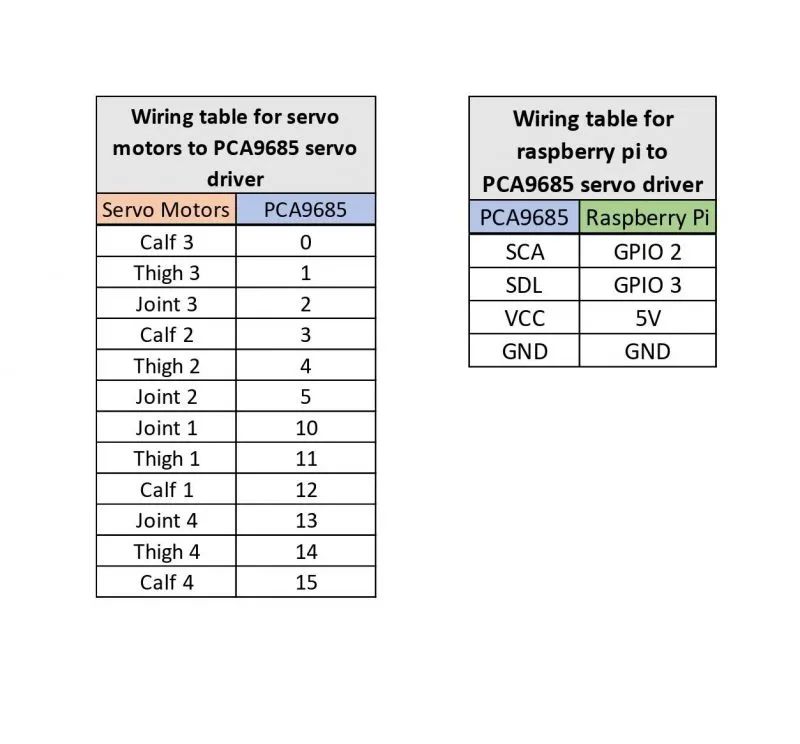
2、每个伺服电机的接线图和表格下面有提供。
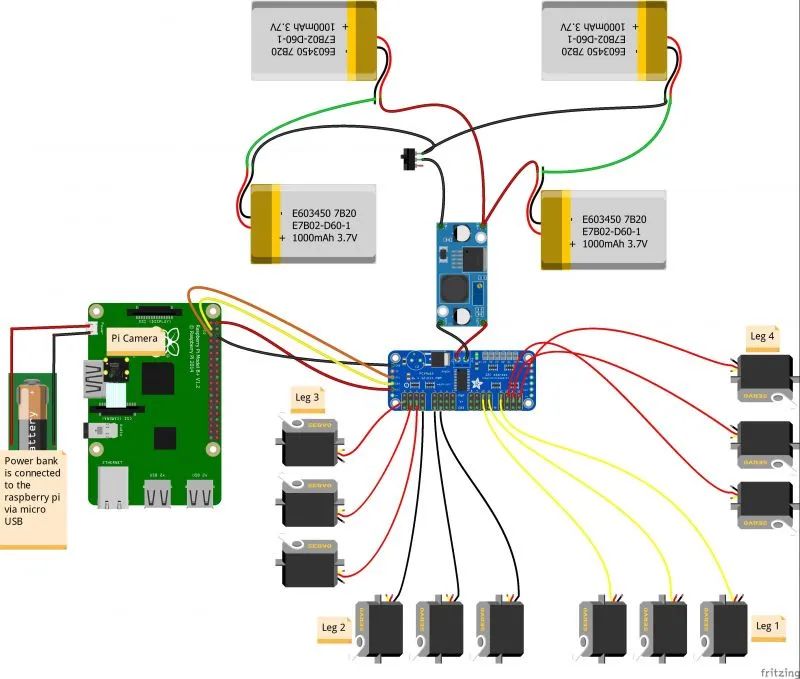
3、如果你对 4 节锂电池的连接感兴趣,这里说明一下。这是一组两节 3.7V 锂电池,串联成 7.4V 电池组。通过另一组同样的并联,每个锂电池 700mAh,最终成为 7.4V 1400mAh 电池组。串联增加电压,并联扩充容量。机器人上有两块电源,锂电池组给伺服电机供电,移动电源独立为树莓派供电。
下面是用到的软件和命令:
WinSCP: https://winscp.net/eng/download.php
Adafruit_Python_PCA9685 模块:
sudo pip3 install adafruit-pca9685
Pygame 模块:
sudo pip3 install pygame
程序源文件可在本项目文件库下载:
https://make.quwj.com/project/349
完成
你可以在此机器人平台上做一些有趣的扩展、升级。例如增加一个 HC-SR04 超声波传感器,在本项目的文件库中已经提供了相应的 STL 文件。通过编程即可实现让机器人自主行走,绕开障碍物。
通过加装 MPU-6050 传感器,还可以让机器人实现自平衡。引入 OpenCV 让机器人具有计算机视觉功能……
尽情发挥你的想象力吧!
本项目文件库地址:
http://make.quwj.com/project/349
via instructables.com/id/3D-Printed-Raspberry-Pi-Spider-Robot-Platform/
责任编辑:xj
原文标题:3D 打印的树莓派蜘蛛机器人
文章出处:【微信公众号:嵌入式ARM】欢迎添加关注!文章转载请注明出处。
-
【开源项目】Emo:基于树莓派 4B DIY 能笑会动的桌面机器人2023-12-26 16667
-
树莓派打造视频监控机器人Verybot2014-09-18 112847
-
自己做的3D打印机器人2015-02-13 13958
-
请教利用树莓派制作六足机器人的问题2015-11-10 7910
-
有没有用树莓派 香蕉派制作3D打印机的教程?2015-12-17 5279
-
树莓派外壳3D文件分享2016-12-06 11412
-
物联网、AR、3D打印、机器人未来将改变我们的生活?2017-10-19 3026
-
如何使用树莓派开发智能机器人控制系统2021-12-23 4837
-
DIY设计四足蜘蛛机器人2022-08-09 2128
-
基于Arduino的3D打印2轮机器人2022-08-12 4058
-
3D打印构建“折纸”机器人抓手2019-03-20 6049
-
3D打印软体机器人助力3D打印技术发展2019-06-20 3928
-
Buddy:3D打印的Arduino社交机器人2022-11-01 1797
-
用3D打印机和4足蜘蛛机器人制作伺服电机2022-12-09 1074
-
基于树莓派的工业级 3D 打印机!2025-06-29 1597
全部0条评论

快来发表一下你的评论吧 !
