

易于访问且低成本的两轮差速驱动机器人设计方案
电子说
描述
Linorobot是一套与ROS兼容的开源机器人,旨在为学生,开发人员和研究人员提供一个低成本平台,以在ROS(机器人操作系统)之上创建令人兴奋的新应用程序。Linorobot支持您可以从头开始构建的不同机器人基础。
Linorobot是使用易于访问的硬件构建的,因此任何人都可以在家中构建它。每个Linorobot平台都有其自己的硬件控制器,该控制器将ROS导航堆栈发布的速度(X,Y,Z或转向角)转换为从每个平台的运动学中得出的马达运动。每个控制器都具有模块化和可扩展性。无需重写固件或至少重用尽可能多的代码,即可为更大的机器人更换组件 。
它的大脑由连接到Teensy 3.1微控制器的Radx Rock Pro开发板提供动力,以驱动电机并获取IMU数据,作为机器人里程表的一部分。Neato XV-11激光雷达安装在机器人顶部,用于定位(使用AMCL)和避障。
Linorobot由机器人中间件ROS驱动。在整个教程中,您将在构建自己的自主机器人时发现ROS强大而强大的软件开发框架。您可以使用SLAM(同时定位和映射)创建2D映射,了解AMCL(自适应蒙特卡洛定位),以及使用ROS开发机器人的基础知识。
所需组件
数量 x 组件名称
1 × XV-11激光雷达
1 × Radxa Rock Pro
1 × 青少年3.1
1 × GY-85 IMU
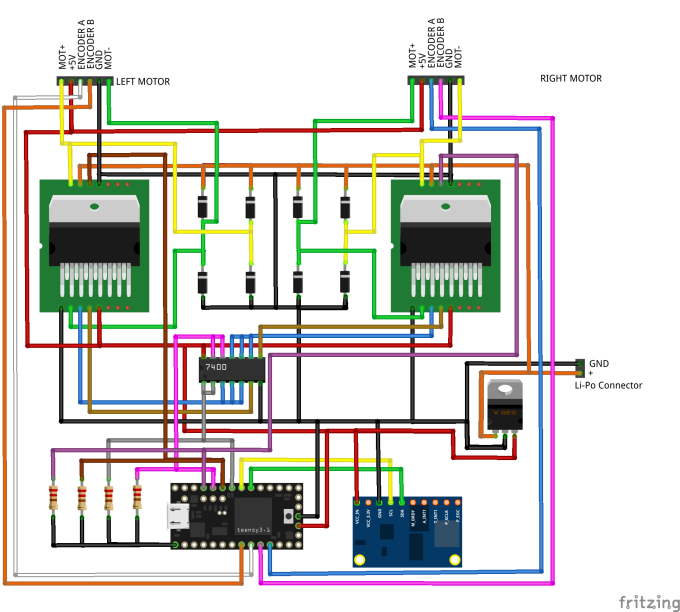
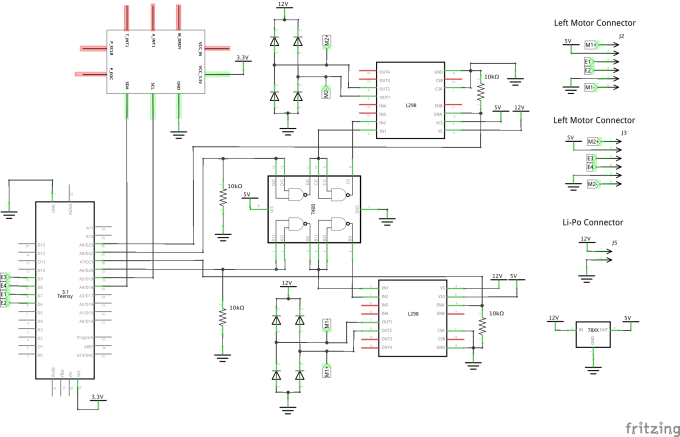
2 × L298N电机驱动器芯片
8 × 1N4001二极管
4 × 10K欧姆电阻器
1 × 7400N芯片
1 × LM7805稳压器
1 × 面包板或原型板
1 × 3S锂电池
1 × 脚轮
2 × 电机轮
1 × 压克力板或木板
责任编辑:xj
原文标题:易于访问且低成本的两轮差速驱动机器人
文章出处:【微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
-
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书2017-08-01 0
-
自主飞行空中机器人设计方案2013-09-26 0
-
机器人设计方案,控制系统设计汇总2014-06-30 0
-
两轮平衡小车2014-07-20 0
-
求大神提供一个切实可行的机器人设计方案,要现在没有做出来的,实用、创新的。2017-01-06 0
-
【MDP-XP数字电源申请】四轮差速巡检机器人应急/调试供电2019-08-27 0
-
基于LPC2119的自主式移动机器人设计方案2020-05-11 0
-
全向轮机器人有哪些特性?2021-08-30 0
-
差速移动机器人轨迹跟踪控制方法2021-09-01 0
-
移动机器人的三种主要运动系统2021-09-01 0
-
浅谈差速机器人的纯轨迹跟踪仿真2021-09-01 0
-
基于SLAM的移动机器人设计2021-11-08 0
-
进阶的电动两轮车:更低成本,更高性能的BMS解决方案2021-12-12 0
-
便携式自动割胶机器人设计方案2021-06-30 731
-
新型手术制孔机器人设计方案2021-07-05 676
全部0条评论

快来发表一下你的评论吧 !
