

用数字集成电路设计的里程表
测试测量实验
描述
用数字集成电路设计的里程表
0 引言
随着数字技术的不断发展,数字集成电路在各个领域的应用越来越广泛。本文介绍一种用数字集成电路、霍尔集成电路设计的里程表。该里程表具有电路结构简单、计量精度高、工作稳定可靠、改变设计量程方便、成本低等特点。我们曾将该里程表安装于某电动车上测试,取得了满意的效果。
1 工作原理
里程表的工作原理框图如图1所示。霍尔集成电路完成从非电量到电量的转换,将车轮转动信号转换为电信号。此信号幅值较小,经过比较器使其变成幅值较大的脉冲信号。该脉冲信号由施密特触发器整形后送给计数器计数。计数器输出的8421BCD码经译码器译码后驱动LED显示器显示出计量结果。根据该框图设计的里程表电路如图1所示。

2 主要单元电路的设计
2.1 霍尔集成电路传感器
传感器是里程表的重要部件,它的性能对整机电路的工作起着极其重要的作用。这里我们选用CS3120开关型霍尔集成电路。这种集成电路具有使用寿命长、无触点磨损、无火花干扰、输出电阻小、功耗低、灵敏度高、温度特性好等特点。电路内部由霍尔元件、电压调整器、差分放大器、输出级等组成,采用塑料封装成三端器件,其功能图如图2所示。
稳压部分使电路能在较宽的电源电压范围内工作,开路输出使电路很容易地与众多的逻辑部件连接。图3是这种开关型霍尔集成电路的转移特性曲线。由图3看出,当外加磁场强度B 上升到导通点BOP时,霍尔开关输出由高电平降为低电平;当B由大变小降至BRP时,输出再由低电平跳变为高电平。

实际应用时将霍尔传感器做成如图4所示的结构。铁杆与磁钢粘牢后固定于车轮的适当位置。霍尔集成电路固定在车架上,与磁钢的垂直距离为2 mm~3 mm。这样,车轮每旋转一周,磁钢产生的磁场掠过霍尔集成电路一次使其输出一个负脉冲。计数器对该脉冲进行计数,则:里程=车轮周长×脉冲数。

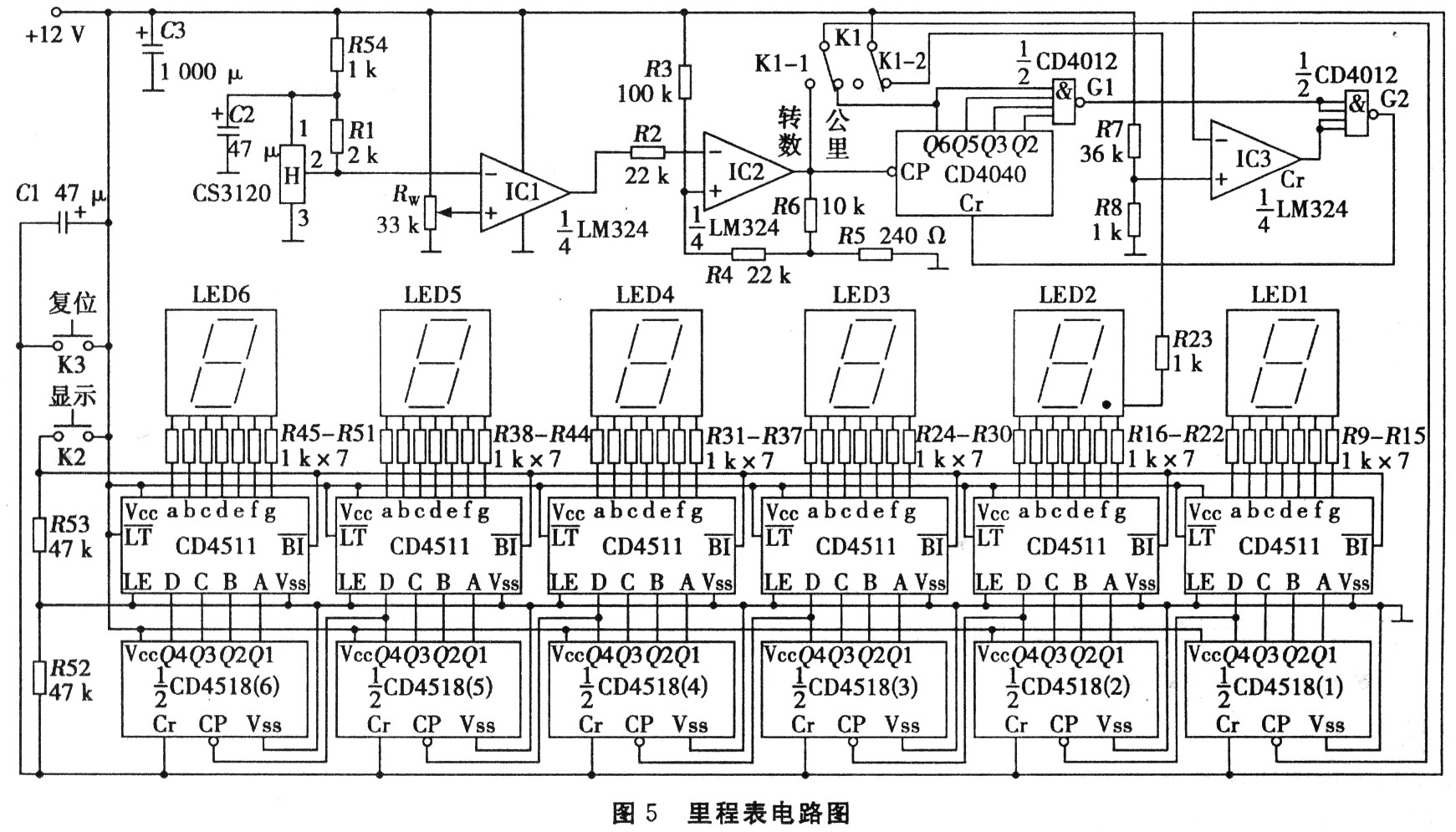
霍尔集成电路的工作电压以5~6 V为宜,过高的电源电压会引起电路因温升而不稳。图5整机电路中R54为降压电阻,将12 V电源电压降至6 V给霍尔集成电路供电。C2是滤波电容。R1为霍尔集成电路的负载电阻,没有这个电阻,输出电压的变化甚小。
应注意的是霍尔集成电路有字标平面为敏感面,要使磁力线垂直穿过敏感面。另外,如发现不能触发,应调换磁钢极性使电路工作正常。
霍尔集成电路CS3120输出的脉冲幅度较小,不能直接推动计数器工作,故在电路中将该信号送给由IC1和Rw组成的比较器。每当负脉冲到来时,由于IC1反相端的电位低于同相端的电位,故比较器输出一个幅值较大的正脉冲。
2.2 施密特触发器
运算放大器IC2以及R2~R6构成反相输出的施密特触发器。它对比较器输出的脉冲信号进行整形。IC2工作在开关状态,具有十分短的前后沿时间。阈电平主要由R3和R4决定。R5上的电压降提供小量的正反馈以便产生所需要的滞后,并防止电路振荡。
2.3 计数器
十二级二进制计数器CD4040以及四输入端二与非门CD4012构成任意进制计数器。因为车轮的周长不是10的整数倍,所以用十进制计数器计数,最后显示的只能是车轮转动的圈数,而不是具体的公里数,设计任意进制计数器就是为了解决这一问题。
笔者实测某车轮的周长为1.834米,则在100米内,车轮转动54圈。据此,将任意进制计数器设计成54进制。由图5知,当CD4040输人54个脉冲后,其Q12~Q1十二个输出中,Q6、Q5、Q3,Q2为高电平,该高电平信号经与非门G1后输出低电平,再经与非门G2反相变为高电平加至 CD4040的Cr复位端使其复位,从而实现54进制计数。同时,第54个脉冲过后,Q6下跳信号加至十进制计数器CD4518(1)的CP端(K3处于图示位置),使其加1。可见,十进制计数器的最低位每输入一个脉冲,表示车前进了100米,即0.1公里。其余十进制计数器记录的依次为里程的个位~万位。
2.4 其它电路
K1是双刀双掷开关,用于显示器工作状态选择。置于“公里”一边,LED2的小数点因K1-2闭合得电而显示,显示器显示的是公里数;置于“转数”一边因K1-2断路小数点失电不再显示,且由于十进制计数器直接接收脉冲信号,显示器显示车轮旋转圈数。
译码电路CD4511能直接推动LED数码管工作。它的BI灭灯控制端,低电平有效。该控制端通过开关K2接至+12 V电源上。平时BI为低电平处于灭灯状态,数码管不显示以节省电能;当按下K2时,数码管工作显示里程或车轮旋转圈数。当然,也可去掉K2,将BI与+ 12 V短接,则数码管始终处于工作状态。LT、LE是它的试灯控制与锁定允许输入端,均已接无效电平。
C1、R52以及IC3等构成上电复位电路,这里IC3被用作反相器。上电时+12 V的高电平通过C1加至六个十进制计数器的Cr端使它们复位;同时这个复位信号经IC3、G2后又加至CD4040的Cr端使它也复位。复位开关K3按下时的工作过程与此相同。
电路需要+12 V电源,可用车上的蓄电池供电。如果蓄电池电压超过12 V,应通过稳压电路供电,例如用三端稳压块7812或LM317等进行稳压。
3 结束语
电路只有一个参数需要调试,通过调整Rw改变IC1同相端的电压。应保证在霍尔集成电路H与磁钢距离最近时,该端电压高于其反相端(即霍尔集成电路输出端)的电压;霍尔集成电路远离磁钢时,该端电压低于其反相端的电压。由于100米不可能恰好等于车轮周长的整数倍,故计量结果会产生误差,其误差的大小与车轮实际尺寸有关。对于1.834米周长的车轮。误差为1%。当K1置于“转数”一边时,显示器显示的结果再乘以车轮周长可得到误差更小的结果。如果相应地增加CD4518和LED数码管的数量,可扩大量程。
更多ic设计资料请访问http://elecfans.com/el@jfchina~~/archives_do.php?aid=254239&dopost=viewArchives
-
 1175008393
2013-03-18
0 回复 举报想要程序跟元器件列表啊······· 收起回复
1175008393
2013-03-18
0 回复 举报想要程序跟元器件列表啊······· 收起回复
-
Verilog HDL数字集成电路设计原理与应用2023-05-26 626
-
数字集成电路设计透视资料下载2021-11-03 1397
-
CMOS数字集成电路是什么?CMOS数字集成电路有什么特点?2021-06-22 5264
-
什么是数字集成电路IC2021-03-03 2873
-
Verilog超详细教程-数字集成电路设计入门2018-03-26 12369
-
数字集成电路 应用+制作 PDF+22016-09-26 4244
-
数字集成电路设计入门2012-08-20 5658
-
数字集成电路设计流程.ppt——独家资料2011-11-22 13496
-
数字集成电路_什么是数字集成电路2011-10-28 5212
-
数字集成电路速查2011-01-31 3521
-
数字集成电路设计教学大纲2010-09-20 1272
-
数字集成电路的类别2009-09-19 1990
-
数字集成电路-电路、系统与设计 免费下载2009-02-12 17312
-
数字集成电路简介2006-04-16 3075
全部0条评论

快来发表一下你的评论吧 !
