

PYNQ框架下开发可重构运动控制器
描述
本文转载自: PYNQ开源社区微信公众号
这项工作是由加州州立理工大学波莫纳分校、C3SR的产学合作课程设计项目。该项目的目标是创建一个通用的运动控制器,与任何运动控制系统或设备兼容,解决工业和开源运动控制器中的问题,同时也相对便宜,易于对创作者群体进行扩展。项目在PYNQ框架下开发了可重构运动控制器,所提出的体系结构依赖于使用S曲线算法来控制轨道上的运动,而另一个则是为了验证概念。
1.什么是S型运动轨迹规划
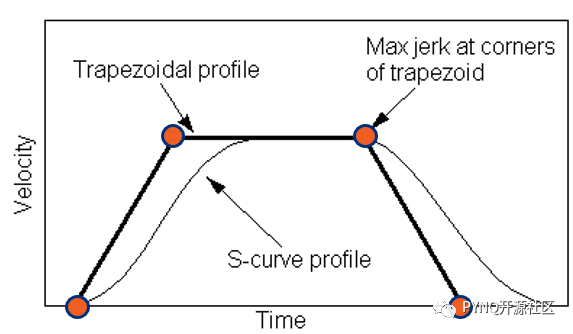
市场上发现的许多工业运动控制器使用具有线性加速和减速阶段的梯形运动轮廓。然而,由于图1所示不同点期间的加速度突然变化,这会导致冲击运动,导致控制系统中出现不必要的振荡。在 S 曲线算法中,加速和减速阶段使用二阶或更高多项式实现,以减少这种冲击运动并产生更平滑的运动。S曲线的阶数越高,生成的运动将变得越平滑,尽管这是以额外资源为代价的。
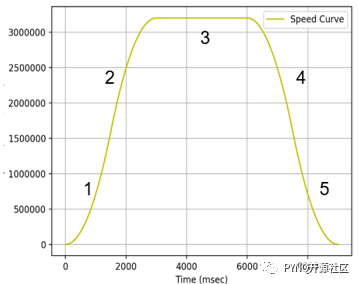
S 曲线算法本身有 5 个主要部分,如图 2 所示。第一节和第二节包括一个增加的正加速度阶段,然后是递减的正加速度阶段。第三部分是加速度为 0 且速度为最大值的稳定状态。第 4 节和第 5 节是前两节的相反状态,其负加速度增加,然后是负加速度递减,直到系统到达目的地。应当指出,这些部分可以进一步细分为其他部分,这将有助于进一步理顺提案。
2.实现
此控制器的实现需要三个主要组件:S-Curve 算法块(蓝色)、FIFO 块(橙色)和包含向目标设备驱动程序生成脉冲的管理块(黄色)。
使用此实现版本的FIFO块是因为S曲线和管理块的频率不同。它充当一个缓冲区,使S曲线与管理器中的脉冲产生相兼容。管理器本身是几个功能的组合,其中最重要的是脉冲发生器或PWM,因为它将S曲线的频率转换为驱动器的脉冲。
3.该项目状态和未来计划
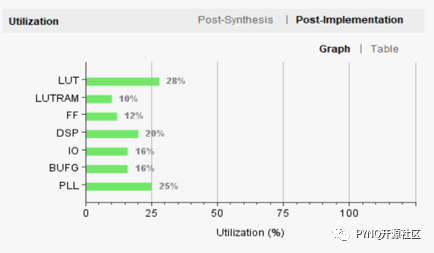
目前的项目状态是一个工作的二阶S曲线运动控制器,计划扩展到更高的阶数以及多个运动轴。在电源和资源使用方面,运动控制器仅使用约318mw,仅占用PYNQ板不到30%的资源,有很大的扩展空间。详细步骤请点击:
审核编辑:何安
- 相关推荐
- 热点推荐
- 开源
-
把PYNQ框架移植到ZC702开发板上2022-12-05 1456
-
基于PYNQ RFSoC框架的开源量子位控制器2021-10-27 3114
-
运动控制器相关资料分享2021-09-07 1317
-
开源方案|PYNQ框架下开发可重构运动控制器2021-02-01 1532
-
PYNQ的常见问题2021-01-29 1137
-
PYNQ框架如何开发可重构运动控制器2021-01-07 1628
-
基于PYNQ-Z2开发板的PYNQ开源项目2021-01-02 8327
-
PYNQ项目——Pynq开发板启动实验2020-12-23 4990
-
基于IIoT-EDDP开源平台和PYNQ软件框架的电机控制2020-10-30 5938
-
【PYNQ-Z2试用体验】基于PYNQ的神经网络自动驾驶小车 - 项目规划2019-03-02 5152
-
运动控制器开发2014-09-16 3904
-
基于ARM+FPGA的重构控制器设计2010-03-02 1253
-
基于DSP的运动控制器的开发2009-12-25 2429
全部0条评论

快来发表一下你的评论吧 !
