

如何关联ELF输出文件并使用vivado对系统进行行为仿真
描述
作者:falwat
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
本文链接:https://blog.csdn.net/falwat/article/details/86171571
本文介绍如何在教程(三)基础上, 关联ELF输出文件并使用vivado对系统进行行为仿真。
关联ELF 文件
在vivado 开发教程(三) 在SDK中创建应用工程 中, 新建的工程经构建最终会生成ELF 输出文件。 ELF 文件是一种用于二进制文件、可执行文件、目标代码、共享库和核心转储格式文件(参考:百度百科)。 可以在教程(三)中新建的“test”工程和导入的例程下找到。
切回Vivado, 在块设计文件“system.bd”上右键,选择菜单“Associate ELF Files.。.”关联ELF文件。
在弹出的对话框中,点击“Simulation Sources | sim_1 | system_i | microblaze_0 ”树右侧的“。..”按钮, 弹出选择文件对话框。
点击“Add Files.。.” 按钮,添加ELF文件。
切换目录至“D:/Projects/test/test.sdk/test_bsp_xgpio_low_level_example_1/Debug”,选中“test_bsp_xgpio_low_level_example_1.elf”, 添加至列表中, 选中新加入的ELF文件并点击“OK”完成。
在工程管理视图 | “Sources”窗口 | “Simulation Sources”文件集 | sim_1 | ELF 下能够看到刚刚关联上去的ELF文件。
新建激励文件
点击“Sources”窗口顶部的“+”按钮, 打开添加源文件对话框。 选中“Add or create simulation sources”, 点击“Next”继续。
点击“Create File”按钮, 在创建源文件对话框中, 输入文件名。 点击“OK”, 点击“Finish”。
在弹出的“Define Module”对话框中, 点击“OK”即可。 激励文件不需要有定义输入输出端口。
双击打开“sim_system.v”文件, 复制“system_wrapper.v”文件中的如下内容到“sim_system.v”的模块中。
wire [7:0]led_8bits_tri_o;
wire reset;
wire rs232_uart_rxd;
wire rs232_uart_txd;
wire sysclk_125_clk_n;
wire sysclk_125_clk_p;
system system_i
(.led_8bits_tri_o(led_8bits_tri_o),
.reset(reset),
.rs232_uart_rxd(rs232_uart_rxd),
.rs232_uart_txd(rs232_uart_txd),
.sysclk_125_clk_n(sysclk_125_clk_n),
.sysclk_125_clk_p(sysclk_125_clk_p));
修改sim_system.v“文件中, system_i的输入信号为”reg“类型, 编写”initial“块对输入信号进行初始化, 为时钟信号编写激励, 将”timescale“ 设置为”1ns / 1ns“。 最终生成的代码如下所示:
`timescale 1ns / 1ns
module sim_system;
wire [7:0]led_8bits_tri_o;
reg reset;
reg rs232_uart_rxd;
wire rs232_uart_txd;
reg sysclk_125_clk_n;
wire sysclk_125_clk_p = ~sysclk_125_clk_n;
system system_i
(.led_8bits_tri_o(led_8bits_tri_o),
.reset(reset),
.rs232_uart_rxd(rs232_uart_rxd),
.rs232_uart_txd(rs232_uart_txd),
.sysclk_125_clk_n(sysclk_125_clk_n),
.sysclk_125_clk_p(sysclk_125_clk_p));
initial begin
reset = 1;
rs232_uart_rxd = 1;
sysclk_125_clk_n = 0;
#100;
reset = 0; // 复位完成
end
always #4 sysclk_125_clk_n = ~sysclk_125_clk_n; // 125M
endmodule
从”Source“窗口中,选中激励文件”sim_system.v“, 右键选择菜单”Set as Top“, 将激励文件设置为顶层。
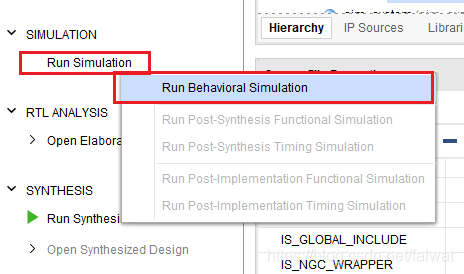
点击左侧”Flow Navigator“工具窗口中的”Simulation“ | ”Run Simulation“, 点击”Run Behavioral Simulation“, 运行行为仿真。
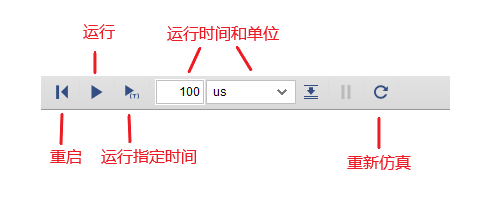
编译成功后会自动打开仿真(”SIMULATION“)视图, 主工具栏会增加如下几个工具图标:
为了能够快速看出仿真效果,缩短仿真时间, 在SDK 中修改”xgpio_low_level_example.c“文件中的宏常量”LED_DELAY“ 改为1000 并保存, SDK在保存后会自动进行编译, 更新ELF文件。
#define LED_DELAY 1000
切回Vivado, 点击重新仿真(”Relaunch Simulation“)按钮。
设置仿真时间为500us, 点击运行指定时间(”Run for 500us“)按钮。最终的仿真时序图如下所示。
审核编辑:何安
- 相关推荐
- 热点推荐
- Vivado
-
Nucleistudio+Vivado协同仿真教程2025-10-23 208
-
在vivado上进行benchmark跑分(微架构优化之前)2025-10-24 224
-
利用 NucleiStudio IDE 和 vivado 进行软硬件联合仿真2025-11-05 366
-
Xilinx ISE 12.2 调用 Modelsim 进行行为仿真详解2012-02-29 10291
-
Xilinx ISE 12.2 调用Modelsim进行行为仿真详解2012-03-05 13168
-
行行为模拟时vivado 2013.2报告了错误是什么原因?2020-04-27 1999
-
Vivado的开发教程2021-02-22 1414
-
如何生成DWARF文件?它是作为ELF生成的吗?2023-04-03 649
-
关于E203v2使用vivado进行仿真跑helloworld的时钟频率问题2023-08-11 660
-
如何在Atmel Studio 6进行ELF文件生成2018-07-04 5157
-
如何创建Vivado HLS项目2018-11-20 4689
-
L6562A对芯片进行行为级别建模控制器2019-07-16 13794
-
FPGA开发Vivado的仿真设计案例分析2020-12-31 6658
-
Vivado 开发教程(四) 行为仿真2021-03-01 1920
-
Vivado调用Modelsim仿真2023-07-24 6071
全部0条评论

快来发表一下你的评论吧 !
