

一种由TL494为控制核心的脉宽调制技术
电子说
描述
随着电力电子技术的发展,脉宽调制(Pulse Width Modulation,PWM)技术的应用日益引起人们的重视。本文介绍了一种由TL494为控制核心的脉宽调制技术,并将其应用于直流电动机控制系统。分析了该系统的工作原理、实现电路以及PWM控制芯片的结构和具体应用。
1.控制系统的工作原理与实现
1.1系统工作原理
本控制系统的基本设计思路是采用降压斩波电路如图1。
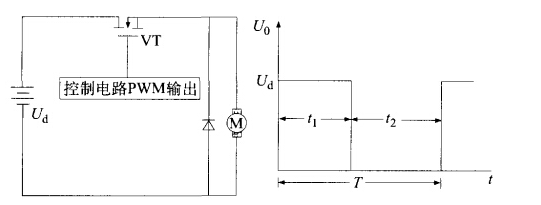
图1 降压斩波电路及其波形
直流电源Ud,负载为电动机(M),当开关器件(VT)被触发导通时,直流电压就加到电动机上,并持续t1时间。当场开关器件关断时,负载上的电压为零,并持续t2时间。若定义工作周期T=t1+t2,占空比k=t/T,则由波形图,并根据直流斩波电路的原理有:
系统输出电压平均值Uo为:

其输出电压的有效值(U)为:
.jpg)
本系统所采用脉宽调制(PWM)工作方式,维持T不变,改变t1。
控制系统的原理框图如图2。
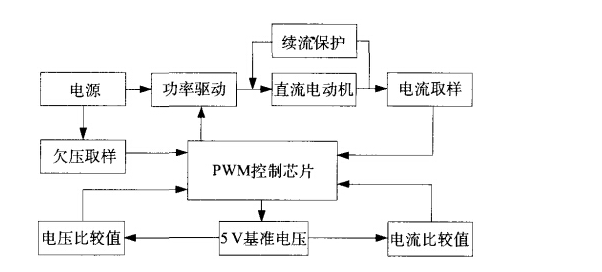
图2 控制系统原理框图
该系统中电源通过功率驱动电路使电动机工作,而功率驱动电路的通断由PWM控制芯片控制;系统对电动机电流进行取样,反馈到PWM控制芯片,与电流比较电路的电流值比较,以控制PWM信号输出,达到调速的目的。系统同时还对电源电压取样,反馈到PWM控制芯片,与电压比较电路的电压值比较,以控制PWM信号输出,达到欠压保护的作用。
功率驱动电路采用常见的BUCK电路,开关管选用Power MOSFET。其输出电压的调节通过控制器件的开通时问来实现,考虑电动机的电感影响,输出电流比较稳定,能耗也较低。
1.2PWM控制芯片的选用
在实现电动机PWM控制系统的控制电路中,本系统选用TL494芯片。TL494芯片具有抗干扰能力强、结构简单、可靠性高以及价格便宜等特点。
TL494的内部电路(如图3)由基准电压产生电路、振荡电路、间歇期调整电路、两个误差放大器、脉宽调制比较器以及输出电路等组成。
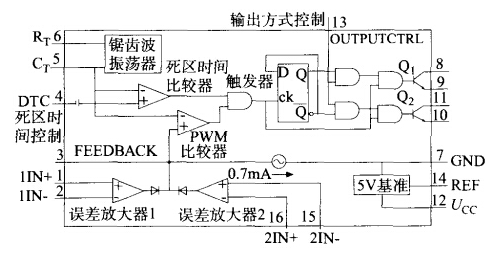
图3 TL494内部结构图
其中1、2脚是误差放大器1的同相和反相输入端;3脚是相位校正和增益控制;4脚为间歇期调理,其上加0~3.3V电压时可使截止时间从2%变化到100%。5、6脚分别用于外接振荡电阻RT和振荡电容CT,以确定振荡器产生锯齿波的频率fosc;

式中,RT和CT的取值范围:RT=5~100kQ,CT=0.001~0.1μF。7脚为接地端;8、9脚和11、10脚分别为TL494内部两个末级输出三极管集电极和发射极;12脚为电源供电端;13脚为输出控制端,该脚接地时为并联单端输出方式,接14脚时为推挽输出方式;14脚为5V基准电压输出端,最大输出电流10mA;15、16脚是误差放大器2的反相和同相输入端。
1.3系统的实现电路
该控制系统的具体实现电路如图4。系统采用电流负反馈的方式跟踪电动机的转速,同时通过对电源的电压负反馈,使系统具有欠压保护功能。
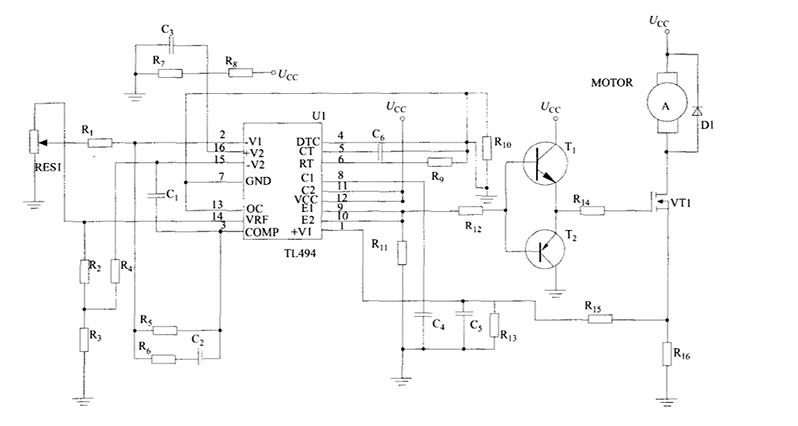
图4 系统的实现电路
检测电动机电流,并反馈到TL494内部误差放大器1的1脚,与2脚的电流基准信号比较,控制TL494的PWM输出,实现对电动机调速的功能。通过调节可调电阻(RES1)的电阻值,即改变设定的电流基准信号的大小,来调节PWM输出信号的占空比,达到调节电动机转速的目的。
通过对电源进行电压取样,并反馈到TI494的内部误差放大器2的15脚,与16脚的电压基准信号比较,控制TL494的PWM输出,实现系统的欠压保护功能。
系统功率驱动选用Power MOSFET,其输入阻抗很高,可直接由晶体三极管驱动。TI494的13脚用来控制输出模式。在该系统中,选择将该端输入为低电平,这时TL494内触发器Q1和Q2不起作用,两路输出相同,其频率和振荡器频率相同、最大占空比为98%。
2.仿真结果
为验证系统的有效性,可以通过计算机对上述基于PWM技术的直流电动机控制系统的电路进行系统仿真。设定该系统的电源电压Ucc=12V,直流电动机额定参数:Un=12V,In=15A,4极,电枢电阻Ra=0.21Q,转动惯量J=0.57kg㎡,通过改变控制电路的可调电阻RES1来实现系统输出的不同占空比,当输出占空比分别为0.2、0.65/0.8电动机的电压和电流波形如图5所示。
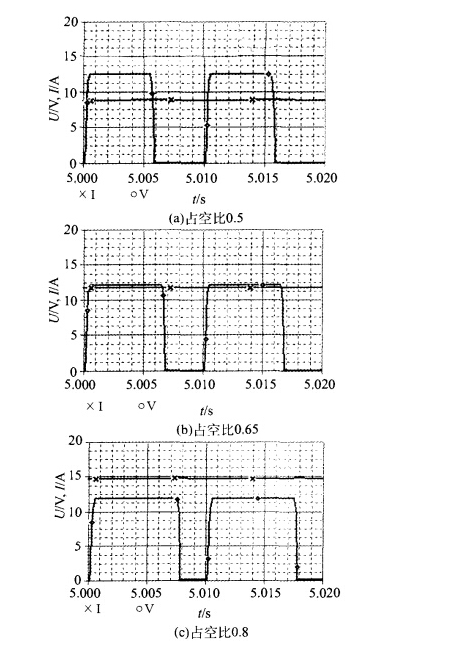
图5 电动机电压与电流波形图
由图5可以看出在输出不同的占空比时,电动机的电压和电流的波形稳定,这有利于电动机长期稳定运行。这说明本文所介绍的基于TL494的PWM控制技术在实际应用中是可行的,而且运行稳定。
结论
本文总结了一种基于TL494芯片的PWM控制技术,通过仿真结果表明该系统结构简单、能耗低、工作稳定,而且充分利用TL494芯片的特点,使系统具有欠压保护的优点。
责任编辑人:CC
-
脉宽调制控制电路TL494数据手册2021-08-23 3882
-
什么是TL494脉宽调制控制电路?2019-08-20 2636
-
TL494脉宽调制控制电路的工作原理和主要特征2019-05-31 3349
-
TL494脉宽调制控制电路全面解析2018-09-30 4410
-
TL494脉宽调制控制电路,TL494 pwm circuit2018-09-20 3412
-
一种基于TL494的PWM控制技术2015-08-09 3698
-
电压驱动型脉宽调制器TL4942010-01-10 1449
-
TL494开关集成电路原理及应用2009-12-29 6509
-
TL494 电压驱动型脉宽调制器2009-07-21 6729
-
TL494脉宽调制控制电路2006-04-03 5484
全部0条评论

快来发表一下你的评论吧 !
