

MITшойцЬ║хЩиф║║хГПф║║ч▒╗ф╕Аца╖щАЪш┐ЗшзжцС╕хТМхСихЫ┤чОпхвГф║дф║Т
чФ╡хнРшп┤
цППш┐░
ф║║ч▒╗шГ╜хдЯщАЪш┐ЗшзжцС╕цЙ╛хИ░хСихЫ┤чЪДчЙйф╜Ух╣╢цШОчбохЕ╢цЯРф║Ых▒ЮцАзя╝Мш┐Щф╕АцКАшГ╜хп╣чЫ▓ф║║цЭешп┤х░дхЕ╢щЗНшжБя╝МшАМц▓бцЬЙшзЖшзЙщЪЬчвНчЪДф║║хРМца╖хЬицЧех╕╕чФЯц┤╗ф╕нщвСч╣БчФихИ░ш┐Щф╕АчВ╣я╝Мф╛ЛхжВхЬихПгшвЛф╕нцС╕ч┤вх╣╢цКУф╜Пф╕Аца╖ф╕Ьше┐уАВ
ш┐СцЧея╝Мщ║╗чЬБчРЖх╖ехнжщЩвя╝ИMITя╝ЙчЪДчаФчй╢ф║║хСШш┐ЫшбМф║Жф╕Ащб╣цКАцЬпчаФчй╢я╝МцЧихЬих░Жш┐ЩчзНф║║ч▒╗шГ╜хКЫхдНхИ╢хИ░цЬ║хЩиф║║ф╕Кя╝Мф╗ОшАМф╜┐хЕ╢щАЪш┐ЗшзжцС╕хН│хПпф║Жшзгхп╣ш▒бчЪДф╜Нч╜ох╣╢хПпхоЮцЧ╢ф╝░шобхп╣ш▒бчЪДхз┐цАБуАВшпечаФчй╢цИРцЮЬщвДхЕИхПСшбихЬи arXiv ф╕Кя╝Мшо║цЦЗчЭАщЗНх╝║ш░Гф║Жф╕НхЖНх▒АщЩРф║ОшзЖшзЙуАБщЯ│щвСхдДчРЖшАМхПкщЬАщАЪш┐ЗшзжцС╕х░▒шГ╜ф╕ОхЕ╢хСихЫ┤чЪДчОпхвГш┐ЫшбМф║дф║ТчЪДцЬ║хЩиф║║чЪДф╝ШхК┐уАВ
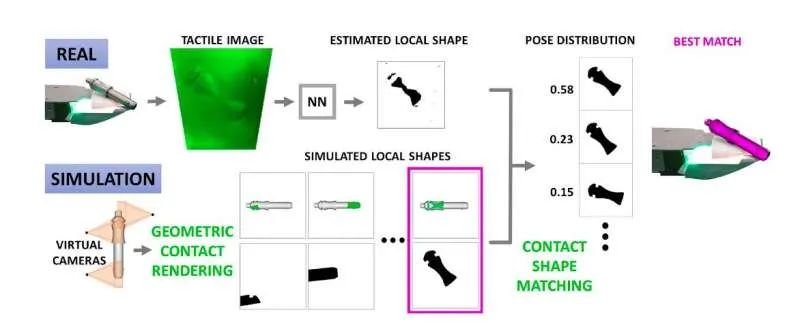
хЫ╛ | х╕охКйцЬ║хЩиф║║щАЪш┐ЗшзжшзЙцДЯчЯецЭехоЪф╜НчЙйф╜У
тАЬцИСф╗мчЪДчаФчй╢чЫоцаЗцШпцГ│шпБцШОя╝МцЬ║хЩиф║║щАЪш┐ЗщлШхИЖш╛ичОЗчЪДшзжшзЙцДЯх║Фя╝МчФЪшЗ│щжЦцмбцОешзжх░▒хПпф╗ехЗЖчбохоЪф╜Нх╖▓чЯечЪДхп╣ш▒буАВф╕Оф╗ехЙНхЬишзжшзЙхоЪф╜НцЦ╣щЭвчЪДх╖еф╜ЬчЫ╕цпФя╝МцИСф╗мчЪДцЦ╣ц│ХцЬЙф║ЖщЗНшжБчЪДщгЮш╖Гя╝МхЫаф╕║цИСф╗мф╕Нф╛Эш╡Цф║Оф╗╗ф╜ХхЕ╢ф╗ЦхдЦщГицДЯх║ФцЦ╣х╝Пя╝Иф╛ЛхжВшзЖшзЙя╝ЙцИЦф╗ехЙНцФ╢щЫЖчЪДф╕ОшвлцУНч║╡хп╣ш▒бцЬЙхЕ│чЪДшзжшзЙцХ░цНоуАВцБ░цБ░чЫ╕хПНя╝МцИСф╗мчЪДцКАцЬпцШпхЬицибцЛЯф╕нчЫ┤цОешонч╗ГчЪДя╝МхоГчммф╕АцмбшзжцС╕х░▒хПпф╗ехоЪф╜Нх╖▓чЯехп╣ш▒бя╝Мш┐ЩхЬихоЮщЩЕчЪДцЬ║хЩиф║║х║ФчФиф╕ншЗ│хЕ│щЗНшжБя╝МхЫаф╕║хЬичЬЯхоЮчЪДцЬ║хЩиф║║ф╕ня╝МхоЮцЧ╢цХ░цНоцФ╢щЫЖцИРцЬмх╛ИщлШцИЦца╣цЬмф╕НхПпшбМуАВтАЭ ш┐ЫшбМшпещб╣чаФчй╢чЪДчаФчй╢ф║║хСШф╣Лф╕А Maria Bauza шбичд║уАВ
чФ▒ф║Ош┐Щщб╣цКАцЬпцШпхЬицибцЛЯф╕нх╛ЧхИ░ш┐Зшонч╗Гя╝МхЫацнд Bauza хПКхЕ╢хРМф║Лф╕НхЖНщЬАшжБхдзщЗПчЪДцХ░цНоцФ╢щЫЖуАВш┐Щф║ЫчаФчй╢ф║║хСШцЬАхИЭх╝АхПСф║Жф╕Аф╕кцбЖцЮ╢я╝МшпецбЖцЮ╢хПпцибцЛЯч╗ЩхоЪхп╣ш▒бф╕ОшзжшзЙф╝ацДЯхЩиф╣ЛщЧ┤чЪДцОешзжя╝МхЫацндхБЗшо╛цЬ║хЩиф║║цЬЙцЭГшо┐щЧоф╕ОхЕ╢ф║дф║ТчЪДхп╣ш▒бцЬЙхЕ│чЪДцХ░цНоя╝Иф╛ЛхжВхЕ╢ 3-D х╜вчК╢уАБчЙ╣цАзчнЙя╝ЙуАВш┐Щф║ЫцОешзжф╝ЪшвлцППч╗Шф╕║ц╖▒х║жхЫ╛хГПя╝МхПпцШ╛чд║хЗ║хп╣ш▒бчй┐щАПшзжшзЙф╝ацДЯхЩичЪДчиЛх║жуАВ
щЪПхРОя╝Мф╗Цф╗мф╜┐чФихЕИш┐ЫчЪДцЬ║хЩихнжф╣ацКАцЬпш┐ЫшбМшобчоЧцЬ║шзЖшзЙхТМшбих╛Бхнжф╣ая╝Мх░ЖцЬ║хЩиф║║цФ╢щЫЖчЪДчЬЯхоЮшзжшзЙшзВхпЯч╗УцЮЬф╕ОцибцЛЯчФЯцИРчЪДф╕Ач╗ДцОешзжф┐бцБпш┐ЫшбМхМ╣щЕНуАВца╣цНоцибцЛЯцХ░цНощЫЖф╕нчЪДцпПцмбцОешзжф╕ОхоЮщЩЕцИЦшзВхпЯхИ░чЪДцОешзжчЪДхМ╣щЕНхПпшГ╜цАзя╝Мхп╣хЕ╢ш┐ЫшбМхКацЭГя╝МцЬАч╗ИцбЖцЮ╢ф╝ЪшО╖х╛Чхп╣ш▒бчЪДхПпшГ╜хз┐хК┐чЪДцжВчОЗхИЖх╕ГуАВ
┬а
┬а
Bauza шп┤щБУя╝ЪтАЬцИСф╗мчЪДцЦ╣ц│Хх░Жшвлч╗Шф╕║ц╖▒х║жхЫ╛хГПчЪДцОешзжч╝ЦчаБхИ░ф╕Аф╕кх╡МхЕех╝Пчй║щЧ┤ф╕ня╝Мш┐ЩцЮБхдзхЬ░чоАхМЦф║ЖшобчоЧцИРцЬмя╝МхПпф╗ехБЪхИ░хоЮцЧ╢цЙзшбМуАВчФ▒ф║ОхоГхПпф╗еф║зчФЯцЬЙцДПф╣ЙчЪДхз┐хК┐хИЖх╕Гя╝МхЫацндхПпф╗еш╜╗цЭ╛хЬ░ф╕ОхЕ╢ф╗ЦцДЯчЯеч│╗ч╗Яч╗УхРИф╜┐чФиуАВф╛ЛхжВя╝МхЬихдЪшзжчВ╣хЬ║цЩпф╕ня╝МхдЪф╕кшзжшзЙф╝ацДЯхЩихРМцЧ╢шзжцС╕ф╕Аф╕кхп╣ш▒бя╝МцИСф╗мх┐Ещб╗х░ЖцЙАцЬЙчЪДшзВхпЯч╗УцЮЬщГ╜цХ┤хРИхИ░хп╣ш▒бчЪДхз┐цАБф╝░шобф╕нуАВтАЭ
цЬмш┤иф╕Кя╝Мш┐ЩчзНцЦ╣ц│ХхПпф╗еца╣цНохп╣ш▒бчЪД 3D х╜вчК╢цибцЛЯхЗ║цОешзжф┐бцБпуАВф╜Жф╗Цф╗мхПСчО░я╝МхЬихИйчФиш┐ЩчзНцКАцЬпф╗Фч╗ЖшзжцС╕хп╣ш▒бцЧ╢х╣╢ф╕НщЬАшжБцФ╢щЫЖф╗╗ф╜Хф╗ехЙНчЪДшзжшзЙцХ░цНоуАВф╣Ях░▒цШпшп┤я╝МцЬЙф║Жш┐Щщб╣цКАцЬпя╝МцЬ║хЩиф║║чЪДшзжшзЙф╝ацДЯхЩихПпф╗ехЬищжЦцмбшзжцС╕хИ░хп╣ш▒бцЧ╢х░▒чФЯцИРхПпшГ╜чЪДхз┐хК┐хИдцЦнуАВ
Bauza шбичд║я╝Мф╗Цф╗мцДПшпЖхИ░шзжшзЙцДЯчЯехЕ╖цЬЙщлШх║жщЙ┤хИлцАзя╝Мх╣╢шГ╜ф║зчФЯщлШх║жч▓╛чбочЪДхз┐хК┐ф╝░шобуАВтАЬшзЖхКЫцЬЙцЧ╢ф╝ЪхПЧхИ░щБоцМбчЪДх╜▒хУНя╝Мф╜ЖшзжшзЙцДЯх║ФхН┤ф╕Нф╝ЪуАВхЫацндя╝МхжВцЮЬцЬ║хЩиф║║шзжчв░хИ░ф║ЖцЯРф╕кчЛмчЙ╣хп╣ш▒бчЪДф╕АщГихИЖя╝Мф╕Фш┐ЩчзНцОешзжф╕ОхЕ╢ф╗ЦчЪДф╕НхРМя╝МщВгф╣ИцИСф╗мчЪДчоЧц│ХхПпф╗еш╜╗цЭ╛шпЖхИлхЗ║ш┐Щф╕АцОешзжхПКхп╣ш▒бчЪДхз┐цАБуАВтАЭ┬а
чФ▒ф║Ошо╕хдЪцОешзжхп╣ш▒бф╕НхЕ╖хдЗчЪДчЛмчЙ╣хМ║хЯЯя╝ИхН│хоГф╗мчЪДцФ╛ч╜оцЦ╣х╝ПхПпшГ╜хп╝шЗ┤цЬАч╗ИчЪДцОешзжцЮБхЕ╢ч▒╗ф╝╝я╝Йя╝МхЫацнд Bauza хПКхЕ╢хРМф║Лх╝АхПСчЪДцЦ╣ц│ХхПпф╗ещвДц╡ЛчЪДцШпхз┐хК┐хИЖх╕Гя╝МшАМф╕НцШпхНХф╕кхз┐хК┐ф╝░шобуАВш┐Щф╕ОцндхЙНх╝АхПСчЪДхПкцФ╢щЫЖхНХф╕кхз┐хК┐ф╝░шобчЪДхп╣ш▒бхз┐цАБф╝░шобцЦ╣ц│Хх╜вцИРф║Жщ▓ЬцШОчЪДхп╣цпФуАВшАМф╕Фя╝МшпецбЖцЮ╢щвДц╡ЛчЪДхИЖх╕Гф┐бцБпхПпф╗ечЫ┤цОеф╕ОхдЦщГиф┐бцБпш┐ЫшбМхРИх╣╢я╝Мф╗ОшАМшГ╜хдЯш┐Ыф╕АцнехЗПх░Схп╣ш▒бхз┐цАБщвДц╡ЛчЪДф╕НчбохоЪцАзуАВ
хА╝х╛Чц│ицДПчЪДцШпя╝Мф╗Цф╗мш┐ШшзВхпЯхИ░я╝МхРМцЧ╢ф╜┐чФихдЪф╕кцЙЛцМЗцОешзжхп╣ш▒бя╝Мх╣╢хРМцЧ╢хп╣хдЪф╕кцОешзжш┐ЫшбМч╗ДхРИя╝Мф╣ЯхПпф╗еш┐ЕщАЯхЗПх░Схп╣ш▒бхз┐цАБф╝░шобчЪДф╕НчбохоЪцАзуАВ
хПВф╕Ош┐Щщб╣чаФчй╢чЪДхПжф╕Аф╜НчаФчй╢хСШ Alberto Rodriguez шбичд║я╝МтАЬцДЯх║ФшзжцС╕шГ╜хКЫцЬАш┐СхЬиф╕ЪчХМх╝Хш╡╖ф║ЖцЮБхдзф║ЖчаФчй╢хЕ┤ш╢гя╝МшАМцИСф╗мф╕╗шжБцШпщАЪш┐Зч╗УхРИф╕Йф╕кхЫач┤ацЭехоЮчО░ш┐Щф╕АчВ╣чЪДя╝Ъя╝И1я╝Йф╕АчзНхИЖш╛ичОЗщлШф╜Жх╣╢ф╕НцШВш┤╡чЪДцДЯх║ФцКАцЬпя╝МшпецКАцЬпф╜┐чФих░ПхЮЛчЫ╕цЬ║цЭецНХшО╖шзжцС╕шбищЭвчЪДхПШх╜вя╝Иф╛ЛхжВ GelSight цДЯх║Фя╝Йя╝Ыя╝И2я╝Йх░Жцндф╝ацДЯцКАцЬпч┤зхпЖч╗УхРИхИ░цЬ║хЩиф║║цЙЛцМЗя╝Иф╛ЛхжВ GelSlim цЙЛцМЗя╝Йф╕ня╝Ыя╝И3я╝ЙхЯ║ф║Оц╖▒х║жхнжф╣ачЪДшобчоЧцбЖцЮ╢я╝МцЭецЬЙцХИхдДчРЖщлШхИЖш╛ичОЗшзжшзЙхЫ╛хГПя╝Мф╗ОшАМщАЪш┐Зх╖▓чЯещЫ╢ф╗╢хоМцИРшзжшзЙхоЪф╜НуАВтАЭ
цА╗ф╣Ля╝МшпечаФчй╢х░Пч╗Дшо╛шобчЪДш┐Щщб╣цКАцЬпхПпф╗ешойцЬ║хЩиф║║хоЮцЧ╢уАБщлШц░┤х╣│хЬ░ф╝░шобхЕ╢цнгхЬицУНф╜ЬчЪДхп╣ш▒бчЪДхз┐цАБя╝Мш┐Щца╖ф╕АцЭея╝Мх░▒шойцЬ║хЩиф║║шГ╜хдЯхп╣хЕ╢хЕ╖ф╜УхКиф╜ЬчЪДх╜▒хУНхБЪхЗ║цЫ┤хЗЖчбочЪДщвДц╡Ля╝Мф╗ОшАМхПпф╗ецПРщлШхЕ╢хЬицУНф╜Ьф╗╗хКбцЧ╢чЪДшбичО░уАВш┐Щхп╣х╖еф╕Ъх╜Уф╕нца╣цНочЙйхУБх╜вчК╢чЪДцибхЮЛш┐ЫшбМч╗ДшгЕчЪДхИ╢щАахХЖцЭешп┤цЮБхЕ╖ф╗╖хА╝уАВ
хЬицЬкцЭечЪДх╖еф╜Ьф╕ня╝МBauza хЫвщШЯшобхИТцЙйх▒Хш┐Щф╕АцбЖцЮ╢я╝Мф╜┐хЕ╢шГ╜хдЯц╢╡чЫЦцЬЙхЕ│хп╣ш▒бчЪДшзЖшзЙф┐бцБпуАВчРЖцГ│цГЕхЖ╡ф╕Ля╝Мф╗Цф╗мш┐Шх╕МцЬЫх░ЖхЕ╢цКАцЬпш╜мхПШф╕║ф╕АчзНшзЖшзЙ - шзжшзЙф╝ацДЯч│╗ч╗Яя╝Мф╗ОшАМшГ╜хдЯф╗ецЫ┤щлШчЪДч▓╛х║жцЭеф╝░чоЧхп╣ш▒бчЪДхз┐цАБуАВ
тАЬцИСф╗мцнгхЬиш┐ЫшбМчЪДхПжф╕Ащб╣чаФчй╢ф╕Ош┐ЩчзНцЦ╣ц│ХхпЖхИЗчЫ╕хЕ│я╝МчЫочЪДцШпцОвч┤вшзжшзЙцДЯчЯецЦ╣ц│ХхЬихдНцЭВцУНф╜Ьф╗╗хКбф╕нчЪДш┐РчФиуАВчО░хЬицИСф╗мцнгхЬихнжф╣ашГ╜шойцЬ║хЩиф║║цЙзшбМч▓╛чбохЬ░цКУцФ╛цУНф╜ЬчЪДцибхЮЛя╝Мф╗ехоЮчО░чи│хоЪхЬ░цКУцПбя╝Мх╕охКйцПРщлШцДЯчЯец░┤х╣│я╝МцФ╣хЦДшзжшзЙхоЪф╜НуАВтАЭ Bauza шбичд║уАВ
┬а
хОЯцЦЗцаЗщвШя╝Ъф╕НхЖНх▒АщЩРф║ОшзЖшзЙя╝БMITчаФхПСцЦ░цКАцЬпшойцЬ║хЩиф║║щАЪш┐ЗшзжцС╕хН│хПпф╕ОхСихЫ┤чОпхвГш┐ЫшбМф║дф║Т
цЦЗчлахЗ║хдДя╝ЪуАРх╛оф┐бхЕмф╝ЧхП╖я╝ЪDeepTechц╖▒чзСцКАуАСцмвш┐Оц╖╗хКахЕ│ц│ия╝БцЦЗчлаш╜мш╜╜шп╖ц│ицШОхЗ║хдДуАВ
ш┤гф╗╗ч╝Цш╛Ся╝Ъhaq
- чЫ╕хЕ│цОишНР
- чГнчВ╣цОишНР
- ц
-
уАРф║СцЩ║цШУчФ│шп╖уАСцЩ║шГ╜цОзхИ╢цЬ║хЩиф║║-шДСхнШхВи2015-07-24 1819
-
цЬ║хЩиф║║х░ЖхПЦф╗гф║║ч▒╗я╝Мф╜ашзЙх╛ЧхСРя╝Я2016-03-09 10345
-
ф║║х╖ецЩ║шГ╜цЬ║хЩиф║║хдзцИШхН│х░Жх╝АхРпя╝МцЬ║хЩиф║║ф╕ЦчХМф╕╗хп╝я╝МцЬ║хЩиф║║цШпхРжшГ╜ш╡Лф║ИхжВф║║ч▒╗ф╕АшИмчЪДцГЕцДЯуАВ2016-11-22 6064
-
ф║║ч▒╗ф╕ОцЬ║хЩиф║║цЬЙцДЯцГЕф║зчФЯхРЧя╝Я2017-11-10 5135
-
шЛ▒чЙ╣х░ФхПСх╕Гф╕дцм╛щХЬхд┤шГ╜шойцЬ║хЩиф║║хГПф║║ч▒╗ф╕Аца╖чЬЛхИ░хдЦщЭвчОпхвГчЪДхПШхМЦ2018-01-23 4391
-
MITцЦ░ч│╗ч╗Яя╝МшГ╜ф╜┐цЧаф║║щй╛щй╢ш╜жш╛ЖшГ╜хГПф║║ч▒╗щй╛щй╢хСШф╕Аца╖хПШщБУшЗкхжВ2018-07-09 955
-
MITцИРхКЯх╝АхПСхЗ║ч╗ЖшГЮхдзх░ПцЬ║хЩиф║║я╝МхПпцДЯчЯехСихЫ┤чОпхвГуАБхВихнШцХ░цНоцЙзшбМшобчоЧф╗╗хКб2018-07-30 4710
-
х╛охЮЛцЯФцАзцЬ║хЩиф║║хПпца╣цНохСихЫ┤чОпхвГшАМцФ╣хПШх╜вчК╢2019-01-23 3862
-
цЬ║хЩиф║║хжВф╜ХцДЯчЯехСихЫ┤чОпхвГ хПпшГ╜цпФцГ│ш▒бчЪДшжБхЫ░щЪ╛2019-06-26 4432
-
ф╕║ф╜Хф╕НшГ╜х░Жф║║ч▒╗цибф╗┐хГПцЬ║хЩиф║║ф╕Аца╖я╝Яф║║шВвф╜УцЬ║хЩихМЦхПпшбМхРЧ2022-11-16 2566
-
щ║╗чЬБчРЖх╖ехнжщЩвцЦ░чаФчй╢я╝ЪшойцЬ║хЩиф║║хГПф║║ф╕Аца╖цЬЙшзжшзЙ2021-01-26 2672
-
шойцЬ║хЩиф║║хПпф╗ехГПч╗ЖшГЮчФЯчЙйф╕Аца╖хПпф╗ешЗкчФ▒шЗкф╕╗тАЬшзЕщгЯтАЭхТМщБ┐щЩй2021-06-01 1589
-
хСихЫ┤чОпхвГхп╣ф║ОщЩ╢чУ╖хдйч║┐чЪДх╜▒хУН2022-07-21 3181
-
ф╕║ф╗Аф╣ИшжБш┤╣ш┐Щф╣ИхдзхК▓шойцЬ║хЩиф║║хГПф║║ф╕Аца╖я╝МшАМф╕НцШпцЫ┤хоЮчФичЪДх╜вцАБя╝Я2025-02-10 2092
хЕищГи0цЭбшпДшо║

х┐лцЭехПСшбиф╕Аф╕Лф╜ачЪДшпДшо║хРз !
