

能勾勒出任何图像轮廓的四轴机械臂设计方案
电子说
1.4w人已加入
描述
Roboartist是一个四轴的机械臂,可以使用Edgestract(我们定制的边缘检测算法),使用钢笔/铅笔在A3纸上勾勒出任何图像的轮廓。该项目依靠核心引擎从上传的图像中提取边缘进行处理。Arduino Mega通过USB /蓝牙端口使用从MATLAB发送的信息来控制伺服器。
硬件
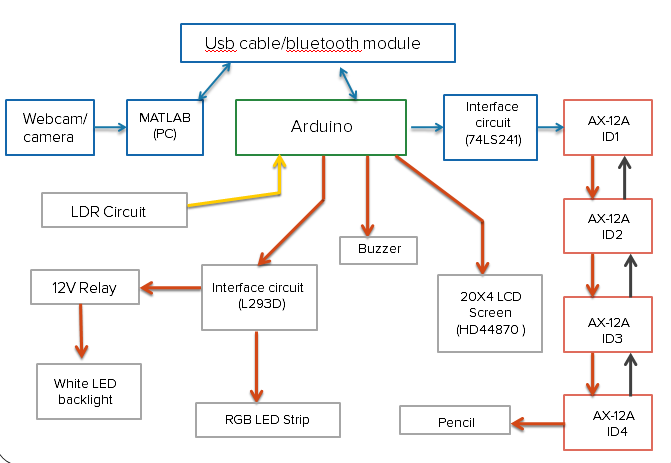
硬件的基本布局如上所述。图像采集是通过网络摄像头或照相机实现的。我们还允许扫描现有的JPEG。尽管并非必须要使用RGB LED灯条和LCD屏幕,但我们只是出于娱乐目的而将其投入使用。真正改善产品设计的是由LED灯条构成的白色LED背光灯。光线透过纸张扩散,为Roboartist的演奏提供了良好的光环。
软件
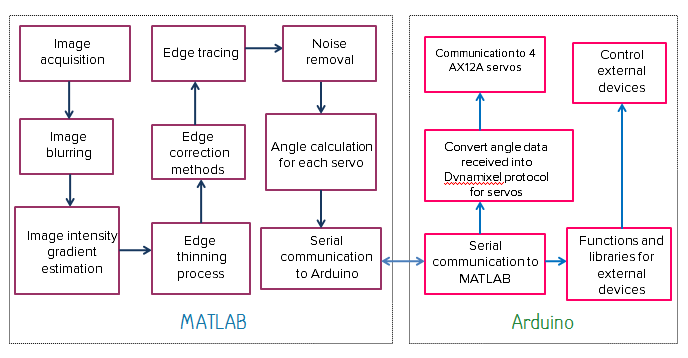
这是软件的结构。基本思想是让MATLAB承担所有繁重的工作,而让Arduino专注于挥舞铅笔。该程序要求用户控制一些参数以消除噪声并获得良好的边缘输出。完成后,程序将与Arduino通信。
快速浏览涉及的图像处理阶段:
每个切片都来自一系列连续的DIP阶段。最初我们一直使用Canny边缘检测算法,但是现在我们已经构建并切换到Edgestract(一种更优化的绘图算法)。我们一直在对各种类型的图像运行该算法并记录结果。
责任编辑:xj
原文标题:能勾勒出任何图像轮廓的四轴机械臂
文章出处:【微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
【开源获奖案例】四轴机械臂控制系统2023-12-23 2903
-
由MPU 6050控制的简单2轴伺服机械臂2022-11-23 1207
-
基于STC8H1K28双轴机械臂驱动模块设计2022-02-18 1464
-
求一种基于stm32的机械臂循迹避障小车设计方案2022-01-05 1364
-
众为兴SCARA四轴机械臂编程(二)——基于硬接线替代Modbus通讯2021-12-20 1564
-
众为兴SCARA四轴机械臂编程(一)——基于ModbusTCP协议2021-12-16 3215
-
基于单片机的三轴机械臂控制怎么实现2021-12-13 2432
-
众为兴SCARA四轴机械臂编程概述2021-07-20 1490
-
请问五轴机械手主臂的负载转矩是如何去计算的?2021-06-28 1700
-
基于机械臂的车辆轮廓扫描定位及数据配准2021-05-26 1096
-
超声电机中设备R轴及微型机械臂的应用分析2020-10-12 3136
-
LED轮廓显示屏控制系统设计方案2020-01-18 1938
-
关于机械臂的设计问题2019-12-16 3115
-
开源工业机械臂开发套件2015-10-23 6277
全部0条评论

快来发表一下你的评论吧 !
