

伺服位置与速度模式控制设备速度的比较
工业控制
1289人已加入
描述
现以相同的机械条件,比较位置与速度两种控制模式,伺服电机运行速度的稳定性。
机械传动方式为同步带方式;
伺服电机为R88M-G型伺服电机;
驱动器为R88D-GT型驱动器;
上位机控制器为CP1H-XA型plc。
一、 位置控制模式
1、 位置控制时的控制接线方式
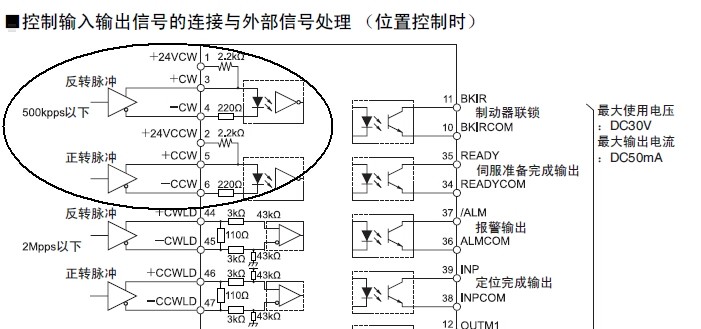
2、 必要的参数设定:Pn02(控制模式选择) 设定为0。
位置控制时主要是通过上位机PLC中的SPED指令设定伺服电机的运行频率。
3、 位置控制时,用CX-Drive软件监视伺服电机的速度曲线。如下图:
二、 速度控制模式
1、 速度控制时的控制接线方式
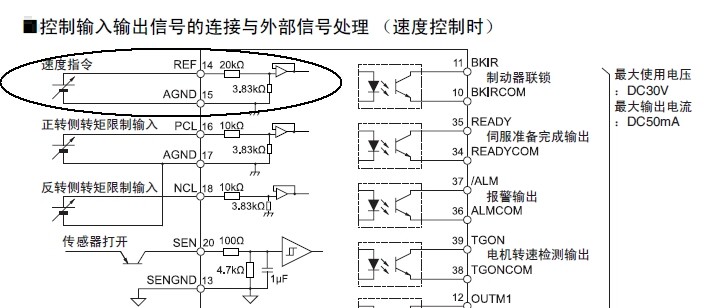
2、 必要的参数设定:Pn02(控制模式选择) 设定为1。
通过外接0—10V DC信号,由电位器输入到PLC的A/D中,然后由PLC的D/A输出来控制伺服电机运行。
3、 速度控制时,用CX-Drive软件监视伺服电机的速度曲线。如下图:
三、 总结
根据上述的速度曲线图中的比较,说明位置控制模式下的速度控制比速度模式下的速度控制要稳定。经长时间的生产运行,位置模式控制的速度一直都很稳定,满足的用户的要求。
责任编辑:lq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何使用PWM控制电机速度2024-06-19 7066
-
松下伺服驱动器速度模式参数设置方法2024-06-12 11719
-
伺服电机位置模式和速度模式的区别2024-06-05 6986
-
伺服电机速度增益的作用2023-12-25 2911
-
伺服电机系统控制中的转矩模式和速度模式介绍2023-03-10 3557
-
伺服控制器速度开环和速度闭环区别2021-09-08 3366
-
伺服电机的两种控制模式2019-10-07 19144
-
伺服电机速度、位置、转矩控制的比较2018-10-11 4383
-
伺服电机的转矩控制、位置控制及速度模式详解2017-12-07 122234
-
AC伺服驱动器位置控制和内部速度模式的连接与设定介绍2017-09-21 1764
-
直流伺服电机速度控制原理2010-02-25 4218
-
位置伺服系统中角速度检测方法综述2009-07-02 761
全部0条评论

快来发表一下你的评论吧 !
