

采用LM393设计的太阳能发电循迹小车
电子说
描述
循迹小车是这种能够顺着预置的运动轨迹线路行车的小车,在很多实验教学场所均有运用。而在循迹小车行车的全过程中,怎么让小轿车可以精确地顺着运动轨迹路线行车而不出现很大的误差,是运用循迹小车的本质。但,目前的循迹小车,因为其通常选用的是红外线反射面方法意见反馈小轿车的行车运动轨迹,控制回路构造比较繁杂,而且红外线反射面易受危害,因此不但成本费较高,并且小车行车运动轨迹非常容易出现误差,与设计方案的运动轨迹不符合。因而,本设计方案进行改善。
现有的循迹小车一般采用的是红外反射方式反馈小车的行驶轨迹,控制电路结构较为复杂,且成本较高,在小车行驶轨迹一定程度上容易出现偏差。因此采用LM393电压比较器设计的能在特定跑道上循迹行驶的轮式智能小车,该循迹小车主要包括太阳能供电部分和循迹控制部分。控制电路部分主要包括蓄电池、开关、第一和第二光敏感应电路、直流电机、比较电路和电机驱动电路。试验样机测试表明,以LM393电压比较器为核心控制的循迹小车具有控制精度高、起停快等特点,解决了循迹小车的控制电路结构复杂、行驶轨迹偏差较大的问题。下面介绍其的设计流程:
1.LM393比较器简介
LM393 IC可以被视为等同比较最流行的版本LM358运算放大器。虽然任何运算放大器都可以用作电压比较器,但LM393通过提供开路集电极输出来证明其优势,使其适合驱动负载。输出晶体管可以驱动高达50V和50mA的负载,适合驱动大多数TTL,MOS和RTL负载。晶体管还可以使负载与系统地隔离。其的特性和规格如下:
(1)单个封装中的双比较器
(2)宽电源范围
单电源 - 2V至36V
双电源 - ±1V至±18V
(3)漏极电流仅为0.4mA
(4)输入失调电压最大为±5mV
(5)功耗:660mW
(6)可以驱动大多数TTL和MOS负载
(7)输出可以与系统地隔离
(8)低偏移电压和电流
2.小车循迹原理
采用LM393电压比较器作为循迹小车的主控芯片。利用光敏电阻在光线强弱条件下的阻值变化和LM393电压比较器对小车的左右驱动轮的控制来实现小车的循迹驱动,配合显示电路来了解小车的状态。基于LM393电压比较器的太阳能循迹小车的原理框图如图2所示。
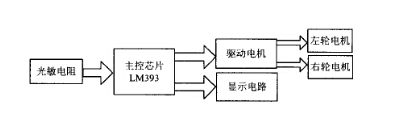
图2 太阳能循迹小车的原理框图
3.电路设计
基于LM393电压比较器控制的太阳能循迹小车的电路设计主要包括太阳能供电部分和小车循迹部分设计。该循迹小车主要部件包括电池盒,通过双面胶粘贴在该电池盒底部的控制电路板,以及安装在该控制电路板两侧的车轮组件和安装在电池盒上方的太阳能电池板。
3.1太阳能供电部分设计
太阳能循迹小车采用蓄电池供电、储电。太阳能电池板为蓄电池提供电源,即先对小车内部蓄电池进行充电,等蓄电池有足够电能输出需要电压时,才能在蓄电池输出端输出需要的电压,以驱动循迹小车。
充电部分采用上海霖叶电子有限公司生产的单节锂电池充电管理芯片TP4057。输入电压为4~9 V,典型值为5 V,可改变TP4057的6脚电阻来控制充电电流,调节范围为100 ~ 500 mA,截止充电电压为4.2 V。具体原理图如图3所示。
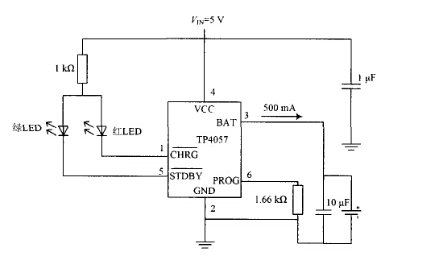
图3 充电电路原理图
该充电电路具有外围简单,无须外接开关管,具有充电指示和充满指示、防电池反接正负极反接保护和电源欠压保护等功能。该电路除了可以采用太阳能电池板供电外,还可以采用USB电源和适配器电源工作。TP4057的SOT封装与较少的外部元件数目使得其适合在本循迹小车中应用。
3.2小车循迹部分设计
小车循迹部分采用LM393电压比较器作为整个循迹电路的控制中心。LM393是双路电压比较器集成电路,由两个独立的精密电压比较器构成,它的作用是比较两个输入电压,根据两路输入电压的高低改变输出电压的高低。采用LM393电压比较器作为循迹控制电路的原理图如图4所示。
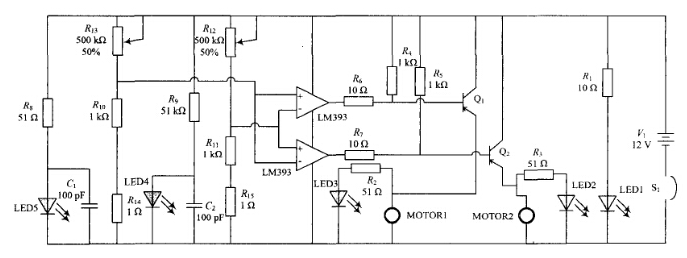
图4 基于LM393的循迹控制电路原理图
本小车选用红色LED灯做光源,光源照射到白色物体和黑色(小车预定的轨迹线为黑色)物体上时的反光率是不同的。光通过地面反射到光敏电阻上,当红色LED光投射到白色区域和黑色轨迹线时因为反光率不同光敏电阻的阻值会发生明显区别;通过检测光敏电阻阻值变化能判断小车是否行驶在黑色轨迹线上。
如果光敏电阻的阻值发生改变,说明检测到白色区域,此时小车已跑偏;此时通过对小车的左轮或右轮的电机采取减速甚至停止,以使小车回到黑色轨迹上去,这样循迹小车就以类似小S型的路线运行实现循迹功能。当出现不平衡时(例如一侧车轮压在黑色轨迹线上)立即控制一侧电机停转,另一侧电机加速旋转,从而使小车修正方向,恢复到正确的方向上,整个过程是一个闭环控制,因此能快速灵敏地控制循迹小车运动。同时光敏电阻能够检测外界光线强弱,外界光线越强光敏电阻阻值越小,外界光线越弱阻值越大,便于后续电路进行控制。本循迹小车左右轮驱动采用带减速齿轮的直流电机,直流电机驱动小车必须要减速,否则转速过高的话小车跑得太快根本也来不及控制,而且未经减速的话转矩太小甚至跑不起来,本循迹小车采用的电机已经集成了减速齿轮大大降低了制作调试难度。图5为基于LM393控制的太阳能循迹小车的成品照片。
图5 LM393太阳能循迹小车的成品图
采用LM393电压比较器作控制器电路与采用单片机作控制电路相比,由LM393电压比较器组成的控制电路结构更简单,方便组装和调试,成本也更低廉。
4.测试
首先,将小车放在黑色轨迹线白色背景测试场上(黑色跑道为小车预设行驶轨迹),并打开开关S1,S2,太阳能电池板(或蓄电池)提供电能,使电压比较器控制两个直流电机启动,从而驱动小车两侧的车轮组件转动,使小车开始沿着设计的轨迹(黑色跑道)行驶。
在小车行驶的过程中,位于小车的左右两侧发光二级管D2,D3均发出红色光源,由于光源照射到黑色跑道和白色跑道上时的反光率不同,并且光敏电阻能够检测外界光线强弱,外界光线越强光敏电阻阻值越小,外界光线越弱阻值越大,因此,当红色LED光投射到黑色跑道和白色跑道时因为反光率不同,光敏电阻的阻值会发生明显区别。
当光源通过跑道反射到光敏电阻R14和R15上时,比较器根据两边光敏电阻阻值的变化,便可以判断小车是行驶在黑色轨迹线上,还是行驶在白色区域上,并且通过左右两侧的二极管和光敏电阻还可以判断小车此时正在偏向于哪一侧,当出现不平衡时(例如小车一侧压到白色区域)立即控制一侧直流电机停转,另一侧直流电机则加速旋转,从而使小车修正行驶方向,并恢复到正确的行驶方向(黑色轨迹线)上。实测时,可以看到小车的左右驱动轮轮流快速转动、停止将小车向前驱动;有个跑偏、矫正,再跑偏,再矫正的过程;但总是沿着既定的黑色轨迹前进。
结语
文中设计方案的太阳能发电循迹小车,通过测试成功实现了小车循迹行驶;能够选用太阳能发电及其电瓶供电系统,而且可靠性和抗干扰性强,线性度高、启停快;处理了循迹小车控制回路繁杂、行车运动轨迹误差很大的难题。仅选用LM393电压比较器作控制板电源电路,便捷拼装和调节,成本费也更便宜,在其中选用非单片机设计操纵是本循迹小车一个特点。总的来说,应用LM393控制的太阳能发电循迹小车适用自主创新和科技推广。
责任编辑人:CC
-
lm393是什么芯片 lm393电压比较器工作原理2024-01-24 18391
-
LM393比较器工作原理及电路图2023-03-24 37137
-
LM393低功耗双电压比较器2022-07-18 5196
-
【分享资料】太阳能发电基本原理—太阳能发电的原理是什么2021-06-30 2662
-
太阳能发电的特点_太阳能发电的原理是什么2020-04-08 22440
-
LM393 双路差动比较器2018-11-02 4519
-
lm393的信号处理与相关设计2018-08-29 4031
-
LM3932018-04-25 5212
-
LM393应用电路及LM393相关的应用资料2017-11-06 31678
-
lm393电压比较器电路2016-01-23 86771
-
LM393的所有应用电路2015-10-09 7503
-
太阳能发电系统2013-04-05 5036
-
lm393典型应用电路2010-07-24 76696
-
太阳能发电概述2010-05-28 1258
全部0条评论

快来发表一下你的评论吧 !
