

【紫光同创国产FPGA教程】【第五章】串口收发实验
描述
原创声明:
本原创教程由芯驿电子科技(上海)有限公司(ALINX)创作,版权归本公司所有,如需转载,需授权并注明出处(http://www.alinx.com)。
适用于板卡型号:
PGL22G/PGL12G
1. 文档简介
本文主要讲解如何编写FPGA串口通信的收发程序,在程序中使用了状态机,是学习状态机的重要实验。
2. 实验环境
-
开发板
-
串口调试助手
3. 实验原理
3.1 串口通信简介
本文所述的串口指异步串行通信,异步串行是指UART(Universal Asynchronous Receiver/Transmitter),通用异步接收/发送。UART是一个并行输入成为串行输出的芯片,通常集成在主板上。UART包含TTL电平的串口和RS232电平的串口。 TTL电平是3.3V的,而RS232是负逻辑电平,它定义+5~+12V为低电平,而-12~-5V为高电平,MDS2710、MDS SD4、EL805等是RS232接口,EL806有TTL接口。
串行接口按电气标准及协议来分包括RS-232-C、RS-422、RS485等。RS-232-C、RS-422与RS-485标准只对接口的电气特性做出规定,不涉及接插件、电缆或协议。
开发板的串口通信通过USB转串口方式,主要是解决很多人电脑不带串口接口的问题,所以这里不涉及到电气协议标准,用法和TTL电平串口类似。FPGA芯片使用2个IO口和USB转串口芯片CP2102相连
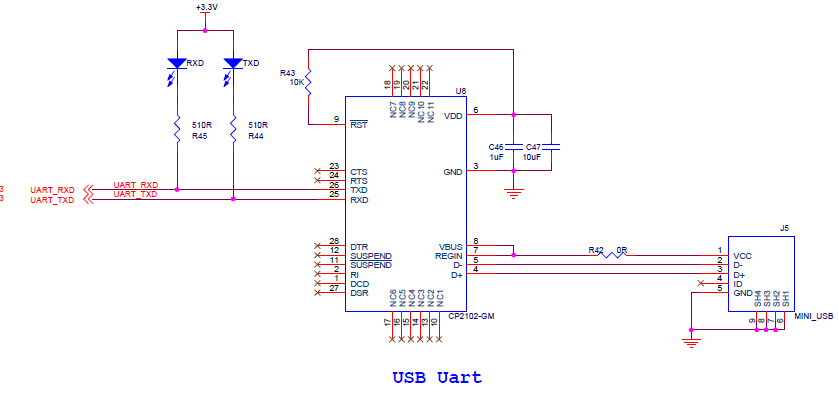
开发板USB转串口部分
3.2 异步串口通信协议
消息帧从一个低位起始位开始,后面是7个或8个数据位,一个可用的奇偶位和一个或几个高位停止位。接收器发现开始位时它就知道数据准备发送,并尝试与发送器时钟频率同步。如果选择了奇偶校验,UART就在数据位后面加上奇偶位。奇偶位可用来帮助错误校验。在接收过程中,UART从消息帧中去掉起始位和结束位,对进来的字节进行奇偶校验,并将数据字节从串行转换成并行。UART 传输时序如下图所示:
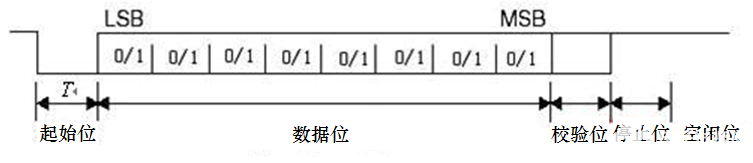
从波形上可以看出起始位是低电平,停止位和空闲位都是高电平,也就是说没有数据传输时是高电平,利用这个特点我们可以准确接收数据,当一个下降沿事件发生时,我们认为将进行一次数据传输。
3.3 关于波特率
常见的串口通信波特率有2400 、9600、115200等,发送和接收波特率必须保持一致才能正确通信。波特率是指1秒最大传输的数据位数,包括起始位、数据位、校验位、停止位。假如通信波特率设定为9600,那么一个数据位的时间长度是1/9600秒。
4. 程序设计
4.1 接收模块设计
串口接收模块是个参数化可配置模块,参数“CLK_FRE”定义接收模块的系统时钟频率,单位是Mhz,参数“BAUD_RATE”是波特率。接收状态机状态转换图如下:
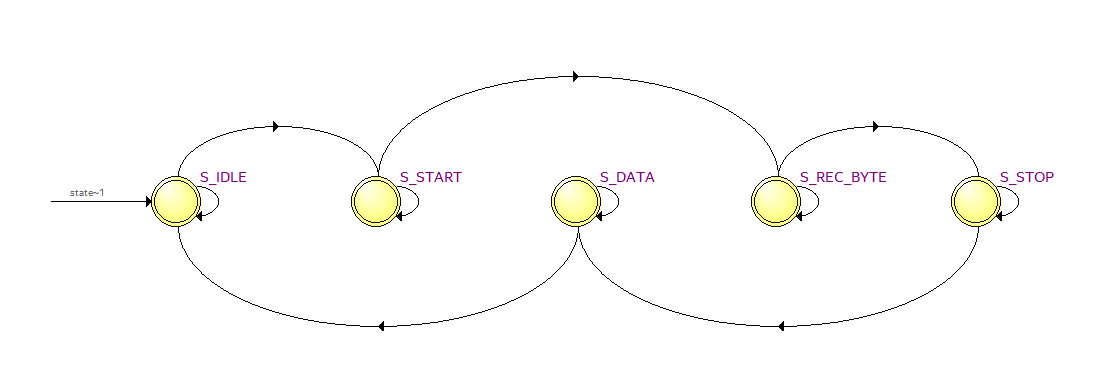
“S_IDLE”状态为空闲状态,上电后进入“S_IDLE”,如果信号“rx_pin”有下降沿,我们认为是串口的起始位,进入状态“S_START”,等一个BIT时间起始位结束后进入数据位接收状态“S_REC_BYTE”,本实验中数据位设计是8位,接收完成以后进入“S_STOP”状态,在“S_STOP”没有等待一个BIT周期,只等待了半个BIT时间,这是因为如果等待了一个周期,有可能会错过下一个数据的起始位判断,最后进入“S_DATA”状态,将接收到的数据送到其他模块。在这个模块我们提一点:为了满足采样定理,在接受数据时每个数据都在波特率计数器的时间中点进行采样,以避免数据出错的情况:
//receive serial data bit dataalways@(posedge clk ornegedge rst_n)begin if(rst_n ==1'b0) rx_bits <=8'd0; elseif(state == S_REC_BYTE && cycle_cnt == CYCLE/2-1) rx_bits[bit_cnt]<= rx_pin; else rx_bits <= rx_bits;end
注意:本实验没有设计奇偶校验位。
| 信号名称 | 方向 | 宽度(bit) | 说明 |
| clk | in | 1 | 系统时钟 |
| rst_n | in | 1 | 异步复位,低电平复位 |
| rx_data | out | 8 | 接收到的串口数据(8位数据) |
| rx_data_valid | out | 1 | 接收到的串口数据有效(高有效) |
| rx_data_ready | in | 1 | 可以接收数据,当rx_data_ready和rx_data_valid都为高时数据送出 |
| rx_pin | in | 1 | 串口接收数据输入 |
串口接收模块端口
4.2 发送模块设计
发送模式设计和接收模块相似,也是使用状态机,状态转换图如下:
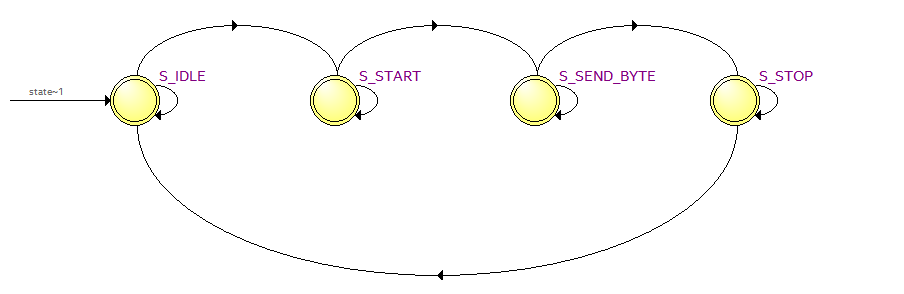
上电后进入“S_IDLE”空闲状态,如果有发送请求,进入发送起始位状态“S_START”,起始位发送完成后进入发送数据位状态“S_SEND_BYTE”,数据位发送完成后进入发送停止位状态“S_STOP”,停止位发送完成后又进入空闲状态。在数据发送模块中,从顶层模块写入的数据直接传递给寄存器‘tx_reg’,并通过‘tx_reg’寄存器模拟串口传输协议在状态机的条件转换下进行数据传送:
always@(posedge clk ornegedge rst_n)begin if(rst_n ==1'b0) tx_reg <=1'b1; else case(state) S_IDLE,S_STOP: tx_reg <=1'b1; S_START: tx_reg <=1'b0; S_SEND_BYTE: tx_reg <= tx_data_latch[bit_cnt]; default: tx_reg <=1'b1; endcaseend
| 信号名称 | 方向 | 宽度(bit) | 说明 |
| clk | in | 1 | 系统时钟 |
| rst_n | in | 1 | 异步复位,低电平复位 |
| tx_data | in | 8 | 要发送的串口数据(8位数据) |
| tx_data_valid | in | 1 | 发送的串口数据有效(高有效) |
| tx_data_ready | out | 1 | 可以发送数据,当tx_data_ready和tx_data_valid都为高时数据被发送 |
| tx_pin | out | 1 | 串口发送数据发送 |
串口发送模块端口
4.3 测试程序
测试程序设计FPGA为1秒向串口发送一次“HELLO ALINX\r\n”,不发送期间,如果接受到串口数据,直接把接收到的数据送到发送模块再返回。“\r\n”,在这里和C语言中表示一致,都是回车换行。
测试程序分别例化了发送模块和接收模块,同时将参数传递进去,波特率设置为115200。
always@(posedge sys_clk ornegedge rst_n)begin if(rst_n ==1'b0) begin wait_cnt <=32'd0; tx_data <=8'd0; state <= IDLE; tx_cnt <=8'd0; tx_data_valid <=1'b0; end else case(state) IDLE: state <= SEND; SEND: begin wait_cnt <=32'd0; tx_data <= tx_str; if(tx_data_valid ==1'b1&& tx_data_ready ==1'b1&& tx_cnt <8'd12)//Send 12 bytes data begin tx_cnt <= tx_cnt +8'd1;//Send data counter end elseif(tx_data_valid && tx_data_ready)//last byte sent is complete begin tx_cnt <=8'd0; tx_data_valid <=1'b0; state <= WAIT; end elseif(~tx_data_valid) begin tx_data_valid <=1'b1; end end WAIT: begin wait_cnt <= wait_cnt +32'd1; if(rx_data_valid ==1'b1) begin tx_data_valid <=1'b1; tx_data <= rx_data;// send uart received data end elseif(tx_data_valid && tx_data_ready) begin tx_data_valid <=1'b0; end elseif(wait_cnt >= CLK_FRE *1000000)// wait for 1 second state <= SEND; end default: state <= IDLE; endcaseend//combinational logic//Send "HELLO ALINX\r\n"always@(*)begin case(tx_cnt) 8'd0: tx_str <="H"; 8'd1: tx_str <="E"; 8'd2: tx_str <="L"; 8'd3: tx_str <="L"; 8'd4: tx_str <="O"; 8'd5: tx_str <=""; 8'd6: tx_str <="A"; 8'd7: tx_str <="L"; 8'd8: tx_str <="I"; 8'd9: tx_str <="N"; 8'd10: tx_str <="X"; 8'd11: tx_str <="\r"; 8'd12: tx_str <="\n"; default:tx_str <=8'd0; endcaseenduart_rx#(.CLK_FRE(CLK_FRE),.BAUD_RATE(115200)) uart_rx_inst(.clk (sys_clk ),.rst_n (rst_n ),.rx_data (rx_data ),.rx_data_valid (rx_data_valid ),.rx_data_ready (rx_data_ready ),.rx_pin (uart_rx ));uart_tx#(.CLK_FRE(CLK_FRE),.BAUD_RATE(115200)) uart_tx_inst(.clk (sys_clk ),.rst_n (rst_n ),.tx_data (tx_data ),.tx_data_valid (tx_data_valid ),.tx_data_ready (tx_data_ready ),.tx_pin (uart_tx ));
5. 仿真
这里我们添加了一个串口接收的激励程序vtf_uart_test.v文件,用来仿真uart串口接收。这里向串口模块的uart_rx发送0xa3的数据, 每位的数据按115200的波特率发送,1位起始位,8位数据位和1位停止位。
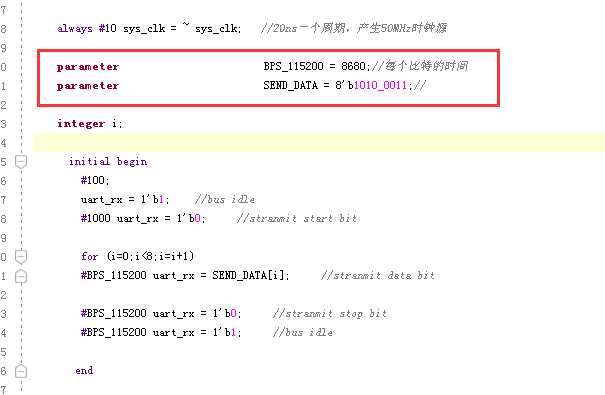
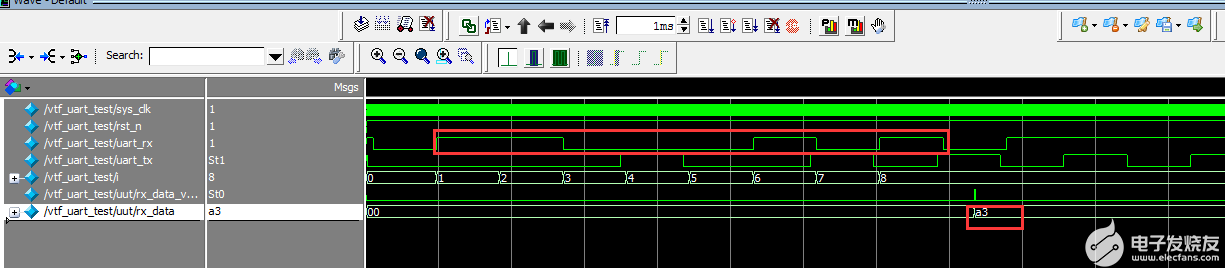
仿真的结果如下,当程序接收到8位数据的时候,rx_data_valid有效,rx_data[7:0]的数据位a3。
6. 实验测试
由于开发板的串口使用USB转串口芯片,首先要安装串口驱动程序,正确安装驱动状态如下图所示(当然要连接串口的USB到电脑)。如果没有正确连接请参考本文附录“串口驱动的安装”。
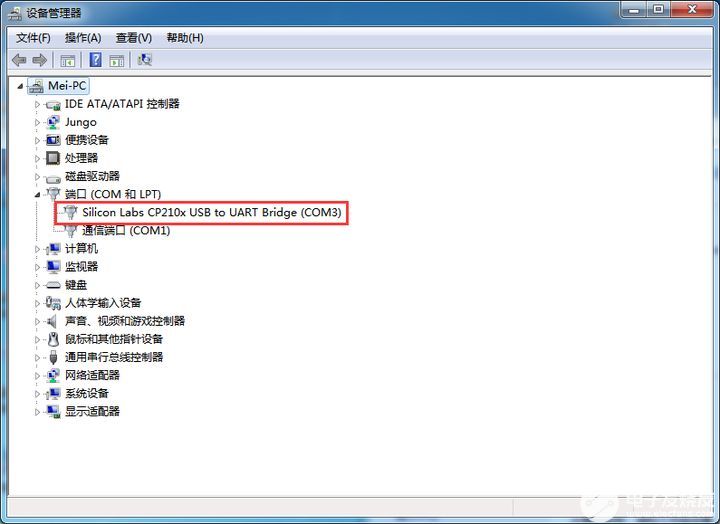
串口驱动正常的状态
从图中可以看出系统给串口分配的串口号是“COM3”,串口号的分配是系统完成的,自动分配情况下每台电脑可能会有差异,笔者这里是“COM3”,使用串口号时要根据自己的分配情况选择。
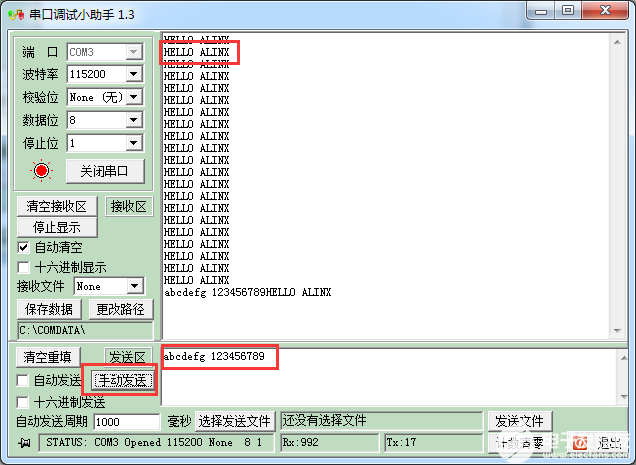
打开串口调试,端口选择“COM3”(根据自己情况选择),波特率设置115200,检验位选None,数据位选8,停止位选1,然后点击“打开串口”。如果找不到这个小软件使用windows搜索功能,在黑金给的资料文件夹里搜索“串口调试”。
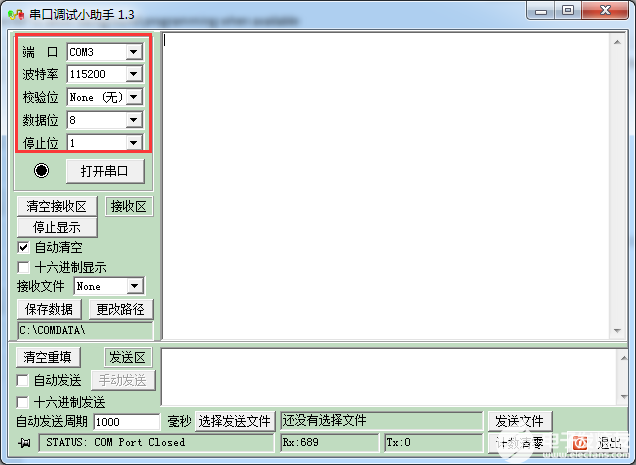
打开串口以后,每秒可收到“HELLO ALINX”,在发送区输入框输入要发送的文字,点击“手动发送”,可以看到接收到自己发送的字符。
7. 附录
7.1 串口驱动安装
没有安装驱动插入usb转串口以后设备管理器下会出现如下情况:

驱动程序的安装文件可以在我们提供的资料里的“软件工具及驱动\USB转串口驱动”目录下找到,如果操作系统是32位的用户双击CP210x_VCPInstaller_x86.exe开始安装; 如果操作系统是64位的用户双击CP210x_VCPInstaller_x64.exe开始安装;

驱动安装成功后,再打开“设备管理器”, 打开“端口(COM和LPT)”,会出现对应的COM Number。分配的编号由系统决定。

-
国产FPGA介绍-紫光同创2024-01-24 2457
-
紫光同创FPGA开发套件,高性能国产FPGA方案2023-11-16 1046
-
紫光同创PGL22G开发板|盘古22K开发板,国产FPGA开发板,接口丰富,高性价比2023-09-21 1181
-
【紫光同创国产FPGA教程】【PGC1/2KG第二章】LED 流水灯实验例程2023-08-09 1452
-
电路分析基础第五章正弦电路的稳态分析课件下载2022-02-11 907
-
计算机网络第五章运输层课件下载2021-05-17 1095
-
电力系统继电保护第五章-自动重合闸(课件)下载.PPT2018-04-28 1380
-
静噪基础第五章_导体传导和共模2018-01-24 1030
-
数字信号处理 第五章2017-10-19 789
-
《测控电路》习题完整参考答案(第五章)2017-02-07 1083
-
高频电子线路第五章答案2010-06-05 849
-
集成运算放大器基础 第五章 PPT2010-04-20 849
-
正弦波转换器 第五章2010-04-16 727
-
三相电路(第五章)2010-04-14 671
全部0条评论

快来发表一下你的评论吧 !
