

无电压传感器DC/DC电源的工作原理及应用方案
描述
DC/DC变换电路是重要的电源电路之一.供给DC/DC电路的供电电源常有波动,同时,用电负载也常有变化,在要求不高的场合可以直接使用,在要求较为严格的场合为保证电源在各种扰动下有优良的输出品质,需要对输入电压做扰动补偿、对输出负载电压进行反馈补偿.文献基于观测器理论提出无电流传感器模型(SCM)控制,改善了噪声带来的不确定性,提高了电源的动态响应范围.根据反馈理论,电流反馈可以改善内环路的动态性能,提高系统的抗干扰能力,而电压反馈则可改善输出电压品质.为提高DC/DC电源的输出电压品质,通常需要对输出电压隔离取样做反馈控制,因此如何迅速准确地获得电源输出电压的测量值,就成为决定DC/DC变换电路品质的重要因素.但是多数电压隔离检测元器件都存在温度漂移大、线性不理想、电路复杂、成本高等问题,文献[2]针对常用电压检测元件存在的问题,提出了运用降维观测器对输出电压进行估计.实际中,能否依照反馈量合理设计调节器是决定电源品质优劣的决定因素.针对反馈量的品质要求,本文基于文献提出了无电压传感器DC/DC电源的设计方法,依据典型I型二阶系统的设计理论,分别对电流调节器和电压调节器进行设计,并利用文献的结果不需要直接测量输出电压即可获得双环控制,从而提高了电源动静态品质.
1 DC/DC变换电路和降维观测器
DC/DC变换电路的结构框图如图1所示。
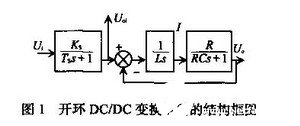
图1开环DC/DC变换电路的结构框图
取状态变量X1=Uo1,X2=Uo,X3=I,得

进而得出DC/DC变换器的降维观测器方程:

2 无电压传感器DC/DC电源设计
2.1 电源组成和工作原理
功率开关放大器和输出L-C滤波器是DC/DC电源的基本组成部分,无电压传感器DC/DC电源在此基础上,利用文献[2]的结果实现反馈,并增加电流调节器和电压调节器,如图2所示,提高电源的稳定性和动态响应特性.
在突加给定U*的起动过程中,电压调节器和电流调节器分别依次给出控制信号,整个起动过程分为3个阶段.第1阶段是电流上升阶段,突加给定电压,由于滤波电感和滤波电容的惯性作用,电压调节器处在饱和状态,电流I线性增加,直到设定的最大值Imax,进入阶段2。阶段2是对电容恒流充电过程,此时输出电压Uo呈线性增加,影响电流,电流调节器开始发挥作用,使电流调节器输出的调节信号按照电压Uo的增长速率升高.阶段3是输出电压调节阶段,电压调节器退出饱和维持恒定的输出电压.

2.2 电流调节器和电压调节器的设计
调节过程表明,调节器的好坏是决定电源品质的关键,以下分别是电流调节器和电压调节器的设计方法.根据电源输出的实际要求设定电压反馈系数h=1/6,电流反馈系数f=1/30.假设dUo/dt≈0,依据工程设计的近似原则,忽略Uo对Uo1的反馈作用,把该系统预定为典型Ⅰ型二阶系统.鉴于本系统的实现目标是双环控制,设计时按照先内环后外环的原则依次进行.
首先考虑内环参数的选取.电流调节器的传递函数设为Kpin.C(s),由于dUo/dt≈0且忽略Uo对Uo1的反馈作用,故得内环开环传递函数

其中电感L的电阻为r。为使内环成为预期的典型I型二阶系统,调节器的参数设置方法如下:

式中Kp是调节器得比例系数,C(s)是比例-积分调节器的传递函数,K是被调节系统的放大倍数,T1、T2是被调节系统的惯性延迟系数.按照式(1),内环调节器的传递函数为

所以内环的闭环传递函数
用相同方法配置外环电压调节器,设Gpout(s)=Kpout.C2(s)为外环调节器的传递函数,把内环闭环传递函数作为外环设计的一部分,于是外环开环传递函数

相应地得出Gpout(s)的参数.
3 仿真结果及分析
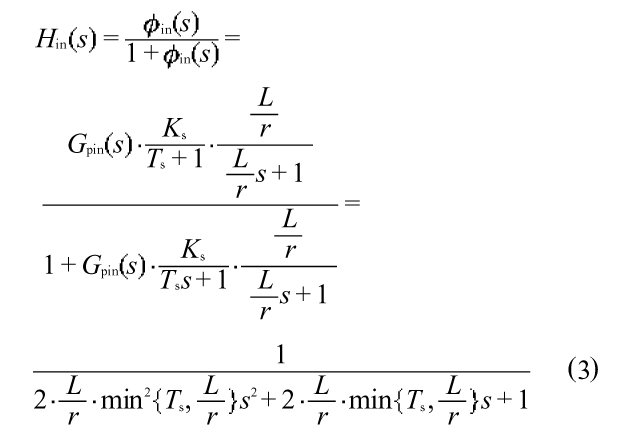
设定仿真参数:电压放大倍数Ks=6,惯性延迟Ts=0.2ms,输出滤波电感L=1mH,输出滤波电容C=1000μF,负载工作电阻R=1Ω,输出滤波电感电阻r=0.01Ω。把上述参数和内环电流反馈f=1/30代入式(2)、式(3)和式(4)分别得:

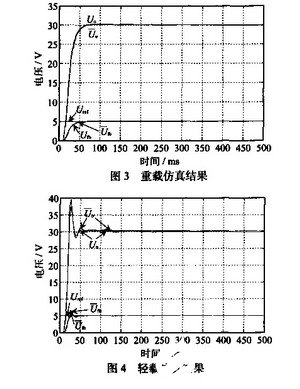
为了修正整定计算的假设条件和克服观测器估计的偏差,在用观测器作为反馈的系统中,电压反馈系数h调整为1/6.05,电压调节器的比例系数Kpout调整为0.03.在上述条件下分别对用观测器估计输出电压作为反馈量和直接取输出电压作为反馈量的系统进行仿真,重载时R=1Ω,轻载时R=50Ω,其结果如图3、图4所示(Uo、Ufb分别代表用输出电压估计作为反馈的电压输出值和电压反馈值,Uo、Ufb分别代表用直接输出电压作为反馈的电压输出值和反馈值,Uref是给定参考值).仿真表明,通过状态观测器的估计可以实现PI反馈调节,系统的输出稳态性能满足预期效果,系统静差在R=1Ω时为0,在R=50Ω时为+0.25V.在动态方面,经过PI调节后系统上升时间和超调量在不同负载情况下略有差别.当R=1Ω时,上升时间约为0.07s,系统的超调量约为0;当R=50Ω时,上升时间约为0.025s,系统的超调量约为55%。(可以根据二阶系统的性能指标,精确计算该电源系统的上升时间、超调量等动静态指标).
4 结论
仿真结果证明,依据状态观测值实现反馈的双闭环控制系统的正确性和可行性,同时验证了双环控制系统的快速动态响应特性.在实际电路中,实现了无电压传感器的双闭环控制.对比R=1Ω和R=50Ω两种代表性负载的电压输出波形,重载的输出波形明显好于轻载输出波形,轻载时调整外环调节器的比例系数可以得到和重载一样好的输出波形,故采用自适应调节器有望获得宽负载范围的高品质电源.
责任编辑:gt
-
降压型DC/DC转换器的基本构成和工作原理2026-06-03 4046
-
电压传感器是什么?工作原理是哪样2025-06-13 3824
-
DC-DC升压模块的工作原理2024-08-23 7579
-
无源型传感器的分类、工作原理及应用2024-08-19 6105
-
dc-dc转换器工作原理2024-05-15 5250
-
DC-DC转换器电路图 Boost升压型DC-DC转换器的工作原理2024-01-19 5899
-
降压DC/DC电压转换器的工作原理2023-10-18 3794
-
DC-DC转换器工作原理是什么?2023-08-18 6473
-
DC/DC电源变换器种类及工作原理2022-10-26 1028
-
DC/DC工作原理及芯片详解2021-11-11 3773
-
硬件设计:电源设计--DC/DC工作原理及芯片详解2021-11-06 1846
-
DC-DC工作原理介绍2021-09-15 1913
-
电子书:DC-DC 转换器的应用与设计方案2019-03-14 7799
-
DC-DC工作原理2012-08-29 12832
全部0条评论

快来发表一下你的评论吧 !
