

无人机压制式干扰拦截原理的详细分析
今日头条
描述
目前,对无人机的干扰拦截通常使用无线电压制技术,通过向目标无人机发射干扰压制信号,对其链路进行压制,迫使无人机失去正常工作能力。一般来说,一套完整的无人机系统通常具有表1所示三类无线电链路。
表1典型的无人机无线电链路
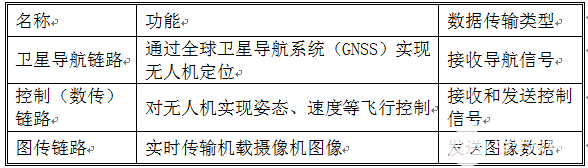
从表1可以看出,若要实现对目标无人机的干扰拦截,仅需对导航、数传、图传三类链路进行压制式干扰即可实现。
2.1无人机导航频率
国际上现有的卫星导航系统(GNSS)可分为北斗(中国)导航、GPS(美国)导航、伽利略(Galileo,欧洲)导航、Glonass(俄罗斯)导航、QZSS(日本)导航、IRNSS(印度)导航共六类,其对应频率如下表所示[8],[9]。
表2全球卫星导航系统(GNSS)分类及频率
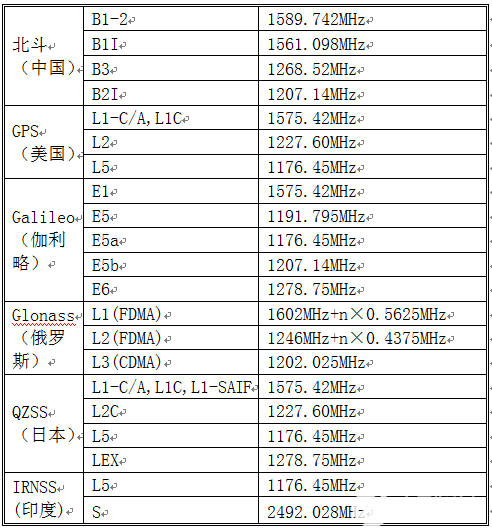
目前北斗导航在我国及我周边国家应用最为广泛,而GPS导航则是目前全球应用最广泛的导航系统。此外,伽利略、Glonass、QZSS和IRNSS导航的主要应用区域与其维护国家(组织)直接相关。我国市场上销售的消费级无人机(大疆、零度等)以及工业级无人机,通常采用GPSL1频段(频率1575.42MHz)进行飞行定位。值得注意的是,因为无人机的导航链路在作用时,无人机仅需要接收地球同步轨道上实时下发的定位数据,所以对无人机导航链路的干扰通常不需要很大功率的压制干扰即可实现。
2.2无人机数传和图传频率
无人机在执行飞行任务时,不仅要依靠卫星信号对其位置进行实时定位,还需要配合机身飞控和机载摄像机等完成对飞行姿态的控制,以及现场图像的回传。
根据我国工信部于2016年发布的《中华人民共和国无线电频率划分规定》,限定840.5-845MHz、1430-1444MHz和2408-2440MHz频段用于我国无人机数传和图传链路,其中1430-1438MHz频段用于警用无人机。值得注意的是,我国现有无人机数传/图传频率除在前文工信部规定的三个频段之外,还存在5.725-5850GHz、328-352MHz、433MHz、560-760MHz、915MHz、933MHz、1.2G等频段的无人机产品。
2.3无人机压制式干扰原理
无人机链路压制式干扰的原理,即是通过产生与无人机正常通信信号同频但信号强度较大的压制式干扰信号,达到抑制无人机正常功能的目的[6]。
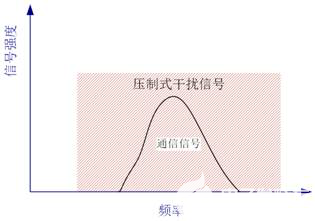
图1压制式干扰信号作用原理
如上图所示,当上图所示红色区域的压制式干扰信号的强度大于无人机通信信号强度,并且其频率范围大于等于无人机通信信号频率范围时,即可实现有效的压制式干扰。在实际应用过程中,为了计算无人机压制式干扰设备的有效拦截距离,通常需要引入干信比(J/S,Jammer-to-SignalRatio)的概念。干信比即是干扰信号和通信信号之间的比值,其单位通常用dB来表示。针对无人机而言,因其绝大多数都是装载全向信号接收天线,因此一般采用简化的J/S方程[5],[7]:

(1)其中J/S为干扰压制信号功率和通信信号功率在无人机接收端的比值(单位dB);ERPJ为干扰设备发射的等效辐射功率(单位dBm);ERPS为通信信号发射的等效辐射功率(单位dBm);LJ为干扰设备到无人机的传播损耗(单位dB);LS为通信信号到无人机的传播损耗(单位dB)。根据公式(1)不难看出,只有当J/S≥0时,无人机才能受到有效的压制式干扰。
针对前文提到的无人机导航、数传、图传三类链路,一般来说导航信号在无人机端的等效辐射功率最小,因此也最易实施有效干扰,而数传和图传因为通常距离无人机较近,因此对干扰源的发射功率要求较高。
2.4无人机受干扰状态飞行工况
无人机导航、数传、图传三类链路分别或同时受到压制式干扰时,无人机通常会有四种典型压制干扰工况:直接坠落、自动返航、自动下降或空中悬停。直接坠落:一般来说,出现直接坠落的无人机大多是因为飞控程序中没有失控保护算法,当无人机部分或全部链路中断时,因为程序性错导致飞机直接坠落,此种情况多见于智能化程度较低的航模型无人机或技术不完善的工业级无人机。
自动返航:对于受到干扰后自动返航的无人机而言,因为其可以按照之前记录的起飞点自动精准返回,所以通常导航链路通信仍然正常,受到干扰的是数传、图传链路。同时,此类无人机飞控算法中都会设置为无人机失去控制后自动返航,因此无人机可以按照程序预设完成返航操作(无人机操作界面样例见图2)。
图2某无人机受到干扰返航时遥控界面显示
自动下降:无人机受干扰后实现自动下降通常需具备两个条件,首先是无人机飞控算法中设置为无人机失去控制后自动返航或者降落,其次是其导航链路也受到了干扰影响。
图3某无人机受到干扰自动下降时遥控界面显示
空中悬停:无人机飞控中如果设置其在受到干扰后继续滞空,则无人机在受到压制式干扰后会保持在空中悬停的动作。值得注意的是,如果此时无人机导航链路也受到了干扰,则无人机因为无法定位,通常表现出的飞行工况则是随风漂移。
fqj
-
无人机滑环的核心特点及其应用分析2024-09-12 1136
-
无人机干扰器干扰手机信号吗2024-07-08 3980
-
[10.6.1]--反无人机之压制式干扰李开鸿 2022-11-13
-
无人机反制市场分析2022-08-23 6976
-
无人机反制技术分类2021-11-02 3328
-
无人机反制系统在拦截过程中面临的挑战2021-06-09 1289
-
手持无人机干扰器是一种远距离无人机拦截设备2021-05-31 3365
-
乌克兰公司研发概念截击无人机,可重复使用来拦截微型自杀式无人机2021-01-21 1435
-
无人机压制式干扰拦截的原理是怎样的2021-01-06 4897
-
无人机拦截技术分类与现状2019-07-30 6784
-
无人机管控技术再次成为业界探讨的技术热点2018-08-08 6442
-
无人机射频干扰原理概论2017-05-26 4639
-
uboot代码详细分析2016-01-29 5792
-
复杂电磁环境下无人机通信抗干扰问题研究2015-08-26 7398
全部0条评论

快来发表一下你的评论吧 !
