

自动驾驶中车载激光雷达是什么?
描述
随着iPhone和iPad上激光雷达的使用,激光雷达的话题一下子火了,同时也让原本火热的自动驾驶话题中,车载激光雷达的内容更加热火朝天。
本文的目的是通过激光雷达相关知识和话题的交流,让大家对激光雷达有更加深入的认识,同时也期待能发掘激光雷达更加广泛和深入的应用。
计划以下面一系列话题由浅入深进展展开:
(一)What激光雷达是什么
(二)What车载激光雷达有哪些参与者&产业结构
(三)Why为什么用激光雷达作用
(四)How怎么应用
(五)How激光雷达怎么工作
(六)How激光雷达应用想象篇
(一)What激光雷达是什么
激光雷达即Lidar,是以激光为载体进行测距和探测的传感器。既然是激光雷达,那么就属于雷达的一种,但有别与其他雷达的探测方式,是通过发射的激光进行信息获取。
| 雷达类型 | 频率 | 性质 | 车载应用 |
| 激光雷达 | 10^14Hz | 光(电磁波) | ACC/AEB/ALC等 |
| 毫米波雷达 | 10GHz—200GHz | 电磁波 | ACC/AEB/BSD等 |
| 超声波雷达 | 20KHz以上 | 机械波 | APA/APO/SVA等 |
激光雷达的分类介绍如下图:
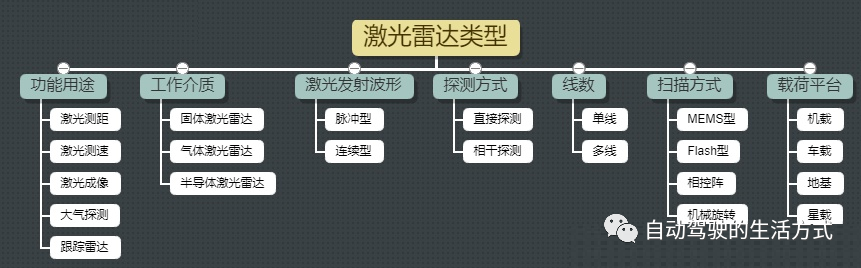
由于当前激光雷达技术方案的分歧点在于扫描方式,所以通常按照扫描方式来分,可以分为:机械旋转激光雷达,混合半固态激光雷达和全固态激光雷达(Flash型和相控阵)。
再来看下激光雷达整体结构框图:
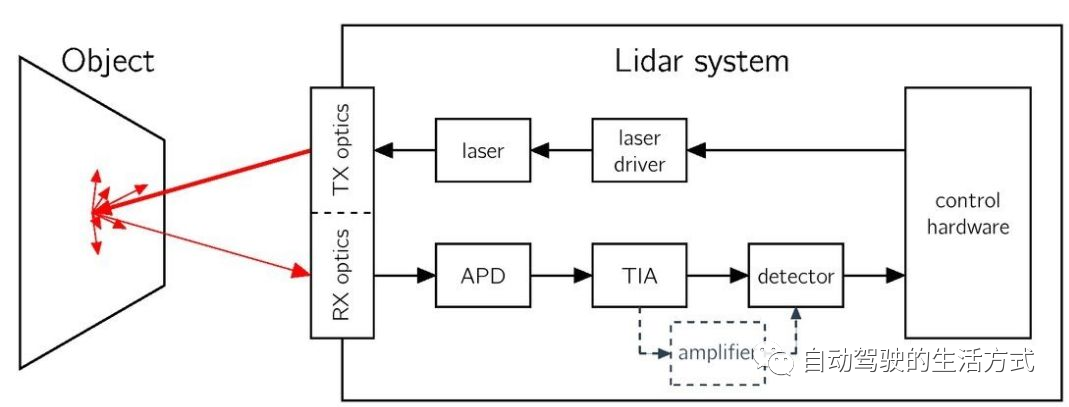
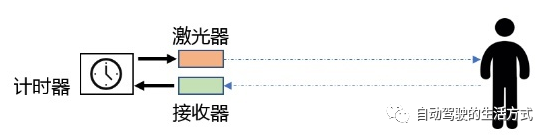
顺便在这里粗略的说一下激光雷达的工作原理,后面会有专门对激光雷达工作原理进行更加详细的研究。
测距:不管是哪一类激光雷达,目前在进行测距的时候大多还是用ToF(Time of Flight)的原理,即发射光到达障碍物,障碍物进行漫反射后部分反射光会到接收器中。而这个距离就是R=C*T/2。
测角:由于光路的可逆性,理论上可以认为光回来的角度即出射角度,即物体角度可以由雷达的相对车辆位置和接收角度获得。
测速:不好意思,单个脉冲由ToF不能直接测速。要实现测速需要进行跟踪和后期的软件算法处理。FMCW激光笑而不语~(后面找个章节来展示下FMCW激光的能力)
测反射率:根据回光强度可以得到障碍物反射光的能力,即反射率。
测高/测宽:由于激光是以脉冲形式发出的,对于测高和测宽无法直接获得,依赖于水平和垂直分辨率,可以通过点云信息在软件算法处理后得到物体的高和宽的信息。
在车上的样子:
超级可爱的无人驾驶车辆
可达到L3级别的自动驾驶车辆
ET7小而美的激光雷达
看了这么高大上的雷达是不是马上想要一个了。拿去年一个机械旋转雷达来说吧,来个段子~
A: 就挑一个还凑合的64线的吧,多少钱?
B:10万!!!
A:我去,这么贵。
B:美金!!!
A: What?
B:不含税!!!
A:能不能再谈谈?
B:最好现金,还不一定有现货...
好消息是技术在不断进步,激光雷达朝着固态化,小型化,低成本发展的路上大步前进了,希望在以后的车上都能有激光雷达的身影
原文标题:车载激光雷达详解之激光雷达是什么(一)
文章出处:【微信公众号:自动驾驶汽车电子系统】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
激光雷达技术:自动驾驶的应用与发展趋势2025-03-10 1929
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2508
-
谈一谈自动驾驶的激光雷达2021-06-17 13499
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 3226
-
激光雷达如何助力自动驾驶?2020-08-17 3264
-
从光电技术角度解析自动驾驶激光雷达2018-09-10 6340
-
简单介绍自动驾驶中的车载激光雷达2018-08-31 15286
-
北醒固态设计激光雷达2018-01-25 5919
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 6180
-
成熟的无人驾驶方案离不开激光雷达2017-10-23 6961
-
激光雷达-无人驾驶汽车的必争之地2017-10-20 7035
-
激光雷达是自动驾驶不可或缺的传感器2017-09-08 5374
-
浅析自动驾驶发展趋势,激光雷达是未来?2017-09-06 5559
全部0条评论

快来发表一下你的评论吧 !
