

PROFIenergy可用来通过PROFINET网络控制能耗
描述
PROFIenergy 可用来通过 PROFINET 网络控制能耗。为此要使用让负载对计划内和计划外中断作出反应的命令。
ROFIenergy 是基于 PROFINET 的数据接口,用于统一关闭用电设备,并在暂停期间进行充分协调,而与制造商或设备类型无关。这样,应确保仅为过程中的设备提供真正所需的电力。过程将节约大部分能量,而 PROFINET 设备本身仅具有较小的节能潜力。
IO 控制器的 PROFIenergy 指令:
需要两条指令控制和监视 PROFIenergy 功能。
通过 PE_START_END 指令,可以轻松地激活和取消激活 PROFINET 设备的闲置状态。这可通过到达沿或离开沿实现。PE_START_END 指令提供实现 PROFIenergy 命令Start_Pause 和 End_Pause 的简单接口。通过 PE_CMD 指令,可以传送所有 PROFIenergy 命令,包括 Start_Pause 和 End_Pause。可以使用其它命令,在暂停期间查询 PROFINET 设备的当前状态或行为。通过 PE_CMD 指令,可以快速便捷地处理所有 PROFIenergy 功能。
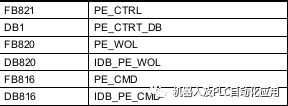
FB PE_WOL (FB820)
由于FB PE_WOL不具有多实例功能,因此将调用它,包括背景数据块DB 820 IDB_PE_WOL。
使用PE_WOL可以使用PROFIenergy寻址多达256个PROFINET设备。在用于初始化块的信号之后,将读取在PROFINET线上连接的所有设备的完整I&M数据。然后,将这些数据保存在PLC数据类型PE_PLUS“ PENERGY”的实例中,并提供给用户(此处为FB PE_CTRL)。
此外,还要检查每个设备的PROFIenergy功能。在下面的操作中,仅寻址支持PROFIenergy备用管理的设备(即可以在暂停期间通过PROFIenergy关机)。
这也包括支持LAN唤醒(WOL)模式的PROFIenergy设备。对于暂停结束命令,将所谓的“魔术包”发送给他们以停止暂停。
在设备进行PROFIenergy转换期间,即紧接在开始或结束暂停命令之后,将周期性轮询该设备的PROFIenergy状态,并更新其数据区域,直到设备终止转换为止。
FB PE_CTRL (FB 821)
PE_CTRL集成了PE_WOL并通过其他功能对其进行了增强:
简化的块参数化
可由过程控制
存储计划的暂停
设备自动唤醒
统一的可视化
此块的功能特点:
KUKA的PROFINET Device 支持 PROFIenergy。在使用 PROFIenergy 时,机器人控制系统通过 PROFIenergy 协议与上一级控制系统通讯。
KUKA用 WorkVisual 配置 PROFINET Device
选项卡 PROFIenergy
机器人控制系统支持以下的 PROFIenergy 状态:
l Ready_To_Operate:该控制器已准备就绪。
l 驱动总线关闭:驱动装置已关闭。
l Hibernate :控制系统处于休眠状态并且只对 WakeOnLan 包有反应。
l 制动器已制动:已制动制动器并且只对下一个运行指令有反应。
如果生产歇工很短,为了使用状态驱动总线关闭,则可以用状态制动器已制动节能。但是,只有在机器人控制系统处于编程停止状态下时,才能激活状态制动器已制动。
PROFIenergy 只能在 AUT EXT 运行模式下执行,而不能在 T1 和 T2 运行模式下执行。无法将 PROFIenergy 与电源管理相结合。
1状态 Ready_To_Operate
2状态驱动总线关闭、Hibernate 或制动器已制动
PROFIenergy 状态有以下特征:
Time_to_Pause (toff) :直到控制系统从状态Ready_To_Operate达到状态驱动总线关闭、Hibernate 或制动器已制动的时间间隔。
Time_min_length_of_stay (toff_min) :控制系统保持在驱动总线关闭、冬眠或制动器已制动状态时的时间间隔。在驱动总线关闭和冬眠状态时,所有已连接的设备在该时间间隔中应当
在重新启动控制系统之前能完全关机。
Time_to_operate (ton) :直到控制系统从状态驱动总线关闭、Hibernate 或制动器已制动到达状态 Ready_To_Operate 的时间间隔。
歇工时间的默认值与最小值相符。不能超过这些值。
可以通过安装其它应用程序包提高歇工时间。建议在投入运行时测试所需的歇工时间。
激活 PROFIenergy 勾选:使用 PROFIenergy。未勾选:不使用 PROFIenergy。
休眠控制:
暂停时间:输入控制系统直到已达到冬眠状态允许需要的时间。默认值:50000 ms
停留时间长度 (分钟):输入控制系统应该保持在冬眠状态下的最小时间。默认值:10000 ms
运转时间:输入控制系统直到已达到 Ready_To_Operate 状态允许需要的时间。默认值:60000 m
关闭驱动总线:
暂停时间:输入控制系统直到已达到驱动总线关闭状态允许需要的时间。默认值:5000 ms
停留时间长度 (分钟):输入控制系统应该保持在驱动总线关闭状态下的最小时间。默认值:0 ms
运转时间:输入控制系统直到已达到 Ready_To_Operate 状态允许需要的时间。默认值:20000 ms
制动制动器:
暂停时间:输入控制系统直到已达到制动器已制动状态允许需要的时间。默认值:1000 ms
停留时间长度 (分钟):输入控制系统保持在制动器已制动状态下的最小时间。默认值:0 ms
运转时间:输入控制系统直到已达到 Ready_To_Operate 状态允许需要的时间。默认值:1000 ms
PROFIenergy 指令
PLC 可借助 PROFIenergy 指令向机器人控制系统发出切换状态或询问信息的信号。为了能够切换状态,机器人控制系统必须处于 AUT EXT 运行模式下。
KUKA支持以下 PROFIenergy 指令:
Start_Pause 机器人控制系统切换到驱动总线关闭状态。
End_Pause 机器人控制系统重新从冬眠 / 驱动总线关闭状态启动。
Go_WOL 将设备设置到状态 PE_sleep_mode_WOL (冬眠)中。
Info_Sleep_WOL 查明设备中有关 PE_sleep_mode_WOL 状态的信息。
责任编辑:lq
-
CCLINKIE转PROFINET:电机的“网络冲浪神器”!2025-05-28 2192
-
profinet转profinet2024-11-09 1424
-
通过Profinet转EtherCAT网关将伺服驱动与Profinet通讯2024-01-16 1636
-
变频器通过RS485转PROFINET网关连接PLC的Profinet网络2023-11-28 917
-
Modbus转Profinet网关在立体仓储系统里的应用2023-11-09 1047
-
通过Profinet转Modbus TCP网关集中采集电源能耗2023-08-24 1786
-
通过Profinet转CanOpen网关连接步科电机2023-04-11 966
-
通过PROFINET进行电源管理2022-08-19 1446
-
通过利用PROFIenergy指令进行机器人节能功能和网络唤醒2022-03-15 3995
-
怎样通过PROFINET通信去控制其他的变频器2021-08-16 1974
-
KUKA 8.3 机器人PROFINET与西门子PROFIenergy 节能功能的配合使用2021-03-18 5798
-
请问WIZnet芯片能用来开发profinet吗?2018-10-22 6003
全部0条评论

快来发表一下你的评论吧 !
