

SPWM逆变器死区影响的几种补偿方法 你们知道吗?
电源/新能源
描述
引言
死区可以避免因桥臂开关管同时导通的故障,但死区同时也引起反馈二极管的续流,使输出电压基波幅值减小,并产生出与死区时间△t及载波比N成比例的3、5、7…次谐波,这是设置死区带来的缺点。这个缺点对变频调速系统的影响最为显著。特别是在电机低速运行时,调制波角频率ωs减小,使载波比N相对增大,因此,死区△t中二极管续流引起的基波幅值减小,和3、5、7…次谐波的增大更加严重。在这种情况下,为了保证系统的正常运行,就必须对死区中二极管续流的这种不良影响进行补偿。
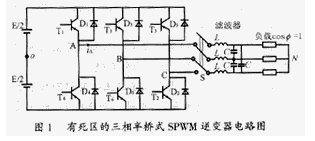
常用的最基本补偿方法有两种:一种是电流反馈型补偿,另一种是电压反馈型补偿。它们的共同补偿原理就是设法产生一个与二极管续流引起的误差电压波形相似、相位相差180°的补偿电压ucom,来抵消或减弱误差波的影响。所谓误差波,就是由反馈二极管续流而引起的误差电压。三相半桥式SPWM逆变器电路图见图1。
电流反馈型补偿
死区设置方式有两种,即双边对称设置和单边不对称设置。现以双边对称设置方式为例来进行说明,其结果对单边不对称设置方式也同样适用。
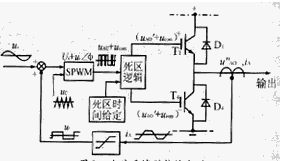
带死区的SPWM逆变器在感性负载时,基波幅值的减小与3、5、7…次谐波幅值的增大都与Δtωc=ΔtNωs成正比(ωc为SPWM中三角波电压的角频率),随着死区时间△t及载波比N的增加,输出电压基波幅值将减小,3、5、7…次谐波幅值将比例增大。当ωs减小N相对增大时,这种影响进一步加剧。为了保证逆变器的正常运行,就必须消除这种不良影响。加入补偿电路就能很好地达到这个目的。采用电流反馈型的补偿电路如图2所示。通过检测逆变器的三相输出电流,并把它变成三相方波电压分别加到各自的调制波us上,例如将检测到的A相电流iA,变成方波电压ui加到A相调制波us上,方波电压ui使逆变器产生一个与电流iA相位相同,与误差波uD1.4波形相似,但与uD1.4相位相反的补偿电压ucom,如图3所示。
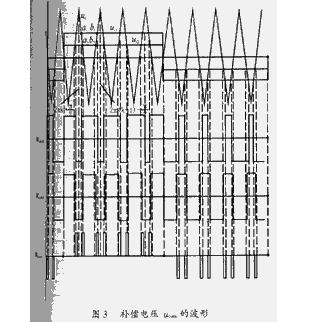
补偿电压ucom的相位与电流iA的相位相同,与误差波电压uD1.4的相位相反。由于载波三角波的每个边都是线性的,所以us+ui调制的波形等于us 和ui调制波形的和。us产生的有死区调制波为uAO′,反馈二极管产生的误差波为uD1.4,ui产生的调制波为ucom,所以逆变器的输出电压方程式为:
采用如图2所示的电流反馈补偿电路,很好地达到了消除误差波uD1.4对基波幅值减小和产生3、5、7…次谐波的不良影响。
电压反馈型补偿
电压反馈型补偿电路如图4所示。将各相的SPWM输出电压波形uAO″通过降压变压器Tr检测出来,并倒相变成-uAO″,用-uAO″与给定的SPWM带死区的信号uAO″相加得到补偿电压ucom,ucom的相位与电流iA相同,与误差波uD1.4的相位相反,用以抵消误差波uD1.4的不良影响。
图4所示的电压反馈型补偿电路,可以完全消除掉误差波uD1.4所造成的不良影响,只不过电路比电流反馈型复杂些。
电流反馈型补偿电路在矢量控制系统中应用实例
矢量控制系统中应用的电流反馈型补偿电路,是在旋转坐标系上进行补偿。当用空间矢量来表示变频器的三相输出电压和电流时,则可以得到不同电流矢量下的误差电压矢量△ui,其相位与电流矢量相反,而与电流的幅值无关,如表1所示。
由表1可知,当电流矢量位于空间六个不同区域时,变频器的输出电压将损失六个对应的电压矢量ΔU1~ΔU6,这六个误差电压矢量的方向与变频器的六个非零空间电压矢量方向完全一致,其幅值为3ΔU/2。
假定变频器输出电压的角频率为ω1,则得到一个同步旋转坐标系doq,d轴与电动机定子A相绕组的夹角θ=fω1·dt,如图5所示,则电动机定子电流矢量在doq坐标系上的id、iq分量为:
任一时刻电流矢量i1在静止坐标系中的位置角(以A相绕组为横坐标轴)为
θ=θ0+θ1
变频器输出电流矢量与误差电压矢量之间的对应关系如表1所示,由表1可以得到补偿电压矢量与θ的关系,如表2所示。
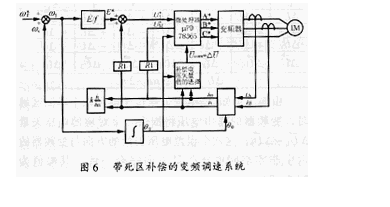
由表2可知,只要实时地检测电动机两相定子电流iA、iB,通过上述方程式计算出电流矢量的位置角θ,由表2查出相应的补偿电压矢量进行补偿,就可以完全消除掉误差波引起的不良影响。补偿电路如图6所示。此系统采用专用微处理器μPD78365,变频器的最高频率可达15kHz。
电压反馈型补偿电路在变频调速系统的应用实例
这是一种电压反馈型补偿电路在8098单片机控制的变频调速系统中的一个应用实例。在本例中,死区是按单边不对称方式设置的。补偿电路是按照检测输出电压uAO″,并与控制信号波uAO进行比较,用所得的偏差电压udev=uAO-uAO″以补偿控制方式进行补偿的。
udev的相位与电流iA相同,与误差电压uD1.4相反,udev 的方程式与uD1.4相似。所含基波与3、5、7…次谐波的成分与uD1.4相同。因此用udev作为补偿电压ucom进行补偿,虽然不如 ucom=-uD1.4好,但也是比较理想的。最终可以使输出电压uAO″的波形达到或接近uAO′的水平。补偿的原理电路如图7所示,用光耦检测A点电位uAO″,uAO以SPWM理想控制信号。当uAO″与uAO电平相同时不输入CK信号;当uAO″下降沿迟于uAO下降沿时,CK输入到减法器;当 uAO″上升沿迟于uAO上升沿时,CK输入到加法器。这一原理分析表明:如果SPWM脉冲在上升沿产生偏差,则在下个脉冲的上升沿就可以得到补偿,不会产生偏差的积累效应,是一种稳态补偿法。
结语
电流反馈型与电压反馈型补偿电路,是最基本的补偿电路,这两种补偿电路如果调整得当都能很好地补偿掉二极管续流产生的误差波引起的不良影响。
电流反馈补偿电路的特点是电路简单,但它是通过对电流的过零点的检测来进行补偿的。由于电流噪声的影响,电流过零点一般都存在一定程度的模糊性,检测精度会受到一定影响。再则,电流滤波环节也会产生检测滞后。因此,在用软件实现时,检测精度的不准和检测滞后的影响会使补偿的精度变差。电压反馈型补偿电路,虽没有过零点检测的模糊性,但都存在SPWM波的检测精度问题。和检测滞后问题。补偿电路相对比较复杂。
应用微处理器μPD78365的矢量控制系统中的电流反馈型补偿电路,与图2所示的原电流反馈型补偿电路的不同之处是,用电流矢量位置角的检测代替了电流过零点的检测,避开了电流过零点的模糊性,由于用区域检测代替瞬时值检测,因而对采样速度的要求较低,易于软件实现。由于是在同步旋转坐标系上进行补偿,所以电流的滤波环节也不会引起滞后。同时电路也比较简单,抗干扰能力也比较强,补偿效果非常理想。应用于8098单片机控制系统中的电压反馈型补偿电路,具有与此相同的效果和特性。
编辑:jq
-
ESD模型有哪几种你知道吗?2023-05-09 3685
-
三相SPWM逆变器Simulink仿真(设置死区时间)2023-03-01 2255
-
逆变器的SPWM调压方法及在线式UPS综述2021-05-19 1950
-
基于位置检测信号的PWM逆变器动态补偿方法研究2020-02-25 2838
-
永磁同步电机驱动系统逆变器死区补偿2017-12-28 1243
-
单相PWM整流器死区补偿方法_赵鲁2017-01-08 1145
-
SVPWM逆变器死区补偿的研究与实现2016-04-14 757
-
一种三相SVPWM逆变器死区补偿方法2016-03-30 609
-
单相桥式PWM逆变器死区补偿的方法2011-08-22 10766
-
空间矢量PWM逆变器死区效应分析与补偿方法2010-02-22 893
-
SVPWM逆变器死区效应补偿方法的研究2010-02-21 781
-
PWM逆变器死区效应的补偿2009-07-10 3371
全部0条评论

快来发表一下你的评论吧 !
