

浅析变频器没有被发明前 电机是如何进行调速的?
描述
当年没有变频器的时候,基本上是直流电机调速系统的天下,阿波罗登月时候也要用精确的调速系统,甚至需要进行位置定位控制,当时也是使用了直流伺服来完成的,如果上个世纪60年代以前,晶闸管都没有诞生的时候,还是通过发电机来带动直流电机进行调速的,调整发电机励磁电流就可以控制发电机的输出电压,从而控制直流电机的转速,这种调速系统可以在早期的《电机拖动》教科书上见到,只是笨重点而已,但是调速范围非常宽,扭矩大,而且稳定可靠,另外直流调速的理论已经非常成熟了,早期的电动汽车上都用这种调速系统。
01直流电机调速系统
这里说到的直流电机,当然说的是有刷直流电机,因为电机的磁场和电枢线圈是分开独立控制的,而且正交90°,并没有耦合问题,当励磁电流保持恒定的时候,定子励磁绕组磁链是不变的。
电机扭矩=励磁绕组磁链*电枢电流 所以只要调整电枢电流的大小,就可以直接实现对电机精确的转矩控制,能轻易满足恒转矩的控制要求,这也是直流电机调速系统低速扭矩非常良好的根本原因。 对于直流电机的调速,转速n=(电枢电压U-电枢电流I*电枢内阻R)/常数Kφ; 因为直流电机的内阻R非常小,所以转速n≈电枢电压U/常数。
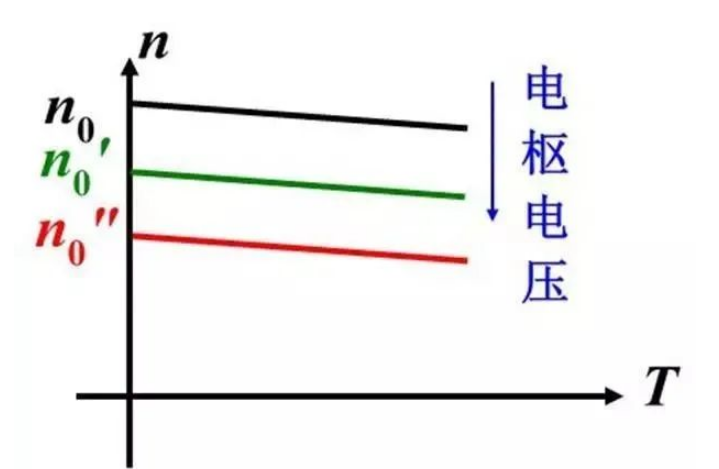
电枢电压U几乎和转速n成正比例关系,这也是直流电机调速通过发电机调压都能满足控制重要原因。 后来可控硅等器件发明出来了,通过全控桥或者半控桥,直接可以让交流电变成可控的直流电,电压大小可以任意快速可调,这样用来控制控制直流电机的电枢电压大小,从而改变电机的转速。

控制理论发展起来后,还对直流电机使用了串级系统来调速,也就是速度环在外边,速度偏差作为电流环的给定,电流环做为内环,两个环都使用PID调节器来完成控制,响应快,精度高,扭力大,调速范围宽。

除了恒扭矩调速外,还可以通过减少励磁电流来降低励磁磁通的方法来让直流电机运行在恒功率区域,这样扭矩是随着转速的增加而减少,功率不变,但是可以扩宽调速范围。 实际上,今天的变频器调速的矢量控制模式,就是模仿直流电机的调速方法来进行的,而且效果还没有直流调速系统的理想。只是因为有刷直流电机碳刷磨损厉害,维护麻烦,而且电机制造成本贵等因素,才逐步让有刷直流电机调速系统退出了市场。即使这样,很多小功率的电机依然使用直流调速系统,毕竟价格有优势,而且性能比较好。
02变极调速
异步电机除了变频调速外,实际还有一种调试方法,那就是通过改变极对数的方法来实现变速,比如四极电机转速时1500转,8极的就只有750转了,这种调速方式有很大的极限性,一般称之为双速电机,往往只有两个转速段,但是扭力比较大,而且比较稳定,在一些只需要两段速的场合,使用这种调速方式是非常理想的,比如一些混料系统上,就有这样的调速系统,低速运行一段时间后,再切换到高速模式,这种控制系统非常简单,有点类似星三角那种切换,所以成本低廉,一直到今天,即使变频非常普及了,但是还是很多场合使用这种调速方式。
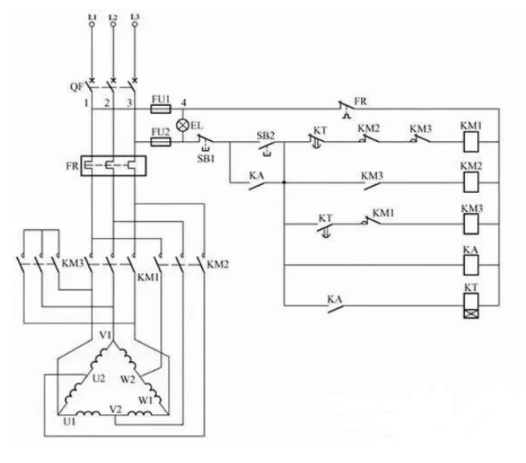
异步电机转速n=60f/p,除了改变频率就可以改变转速n外,调整极对数p也可以让转速得到改变。
03滑差调速
这种调速,顾名思义,就是“打滑”来调速的意思,实际电机转速启动以后是不变的,是通过电机和负载之间的“滑差头”来打滑,让负载这边的速度变低而已,这个滑差头,也可以理解成电磁离合器,这种离合器可以有多种形式,但都是利用了电磁效应形成阻力,下边简单以磁粉离合器的原理来说明一下。
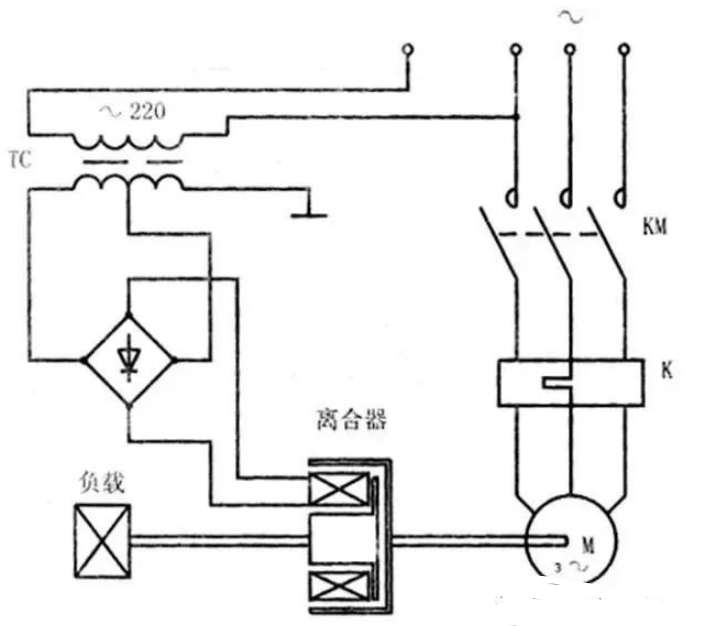
比如在这个离合器里边,装有线圈还有很多磁粉,磁粉在通电情况下,会因为线圈磁场的作用,黏连在一起,电流越大,磁场越强,磁粉之间结合越紧密,达到一定程度,就可以变成一定刚性的东西,直接让输出和输出轴连接到一起,保持一致的速度输出,这样可以让负载和电机转速一样快。 当完全没有电流了,磁场消失,磁粉会变成一盘散沙,输出和输入轴之间完全没有磁粉连接了,虽然电机还在转,负载转速可以变成零了。
如果磁场电流处于一定值,磁粉有一定的黏连,但是刚度不够,就会在里边打滑,这样会让输入和输出轴之间形成一定的速度差,控制磁场电流值大小,就可以控制速度差大小,这样能让负载的速度得到改变。 因为是打滑的,所以肯定会摩擦发热,这样一部分电能会白白浪费,调速的效率低下。当然也有它的优点,它可以做成速度闭环控制,低速时候扭矩比变频器调速还要理想。 赶紧转发收藏吧!
编辑:jq
-
没有电位器,用两个按钮可以实现变频器调速吗?2024-02-18 3831
-
变频器对电机的调速控制2023-11-14 565
-
变频器调速的方法与步骤?2023-09-08 11058
-
没有变频器时如何实现电机调速2023-08-14 2423
-
如何使用变频器给电机调速2023-05-31 7135
-
没有变频器时电机如何调速2023-05-18 3042
-
普通单相电机可以调速吗 单相电机可以用变频器调速吗2023-03-16 20153
-
变频电机怎么调速_变频电机频率范围2023-03-12 7184
-
变频电机怎么调速度_变频电机调速原理2023-03-03 9433
-
变频器调速2021-12-16 2874
-
没有变频器如何实现电机调速?2021-01-23 1717
-
没有变频器如何实现电机调速2020-12-14 2524
-
变频器没有被发明前 电机是如何进行调速的2019-05-20 4047
全部0条评论

快来发表一下你的评论吧 !
