

新研发的机器鱼,首次展示了具有隐形协调特征的复杂三维集体行动
电子说
描述
在海洋中,我们常常能够看到这样一种景象:成千上万的鱼群聚集在一起,进行十分和谐却又似乎毫不费力的游动。这种让人印象深刻的集体行为,通常发生在鱼群进行简单潜水、集体迁徙、躲避捕食者、闪电扩张等具体情境中。
研究人员在对此现象进行了大量的实验和理论工作后发现,这些集体行为主要依靠一种隐形协调机制。在这种隐形协调中,个体鱼类能够对附近的“邻居”进行视觉观察,甚至利用身体侧线感知邻居,并且在不需要明确交流的情况下就能完成水下通信、觅食迁徙等决策。
相比之下,现有的大多数水下机器人则更多地依赖水上的、集中的、明确的沟通,能够协调的复杂性有限。那么鱼群中体现出的这种分散的、自组织的、高度自治的协调方式,长期以来吸引着机器人技术领域中科学家们的兴趣。
近日,哈佛大学约翰·保尔森工程与应用科学学院(SEAS)和威斯(Wyss)生物启发工程研究所的科学家们就从鱼群当中获得灵感,并研发出了一批鱼类机器人。这些机器人不仅外表看起来像鱼,还可以像鱼群一样在海洋中完成集合运动,且不受任何外部控制。与此同时,研究人员还利用这些机器人,首次展示了具有隐形协调特征的复杂三维集体行动的运作过程。
这项研究的论文是由 Florian Berlinger 博士和前威斯技术开发研究员 Melvin Gauci 博士共同撰写的。海军研究办公室、威斯生物启发工程研究所和亚马逊 AWS 研究奖项在一定程度上为其提供了支持。该论文已于 1 月 13 日发表在《科学机器人》(Science Robotics)上。
这些机器鱼整体被命名为 Blueswarm,是在 SEAS 的计算机科学学院教授和威斯学院的助理研究员 Fred Wavli 的实验室 Radhika Nagpal 中诞生的。Nagpal 实验室是研究自组织系统的先驱,长期以来从事自组织行为的研究,曾经研发出 1000 个名叫 kilobot 的机器人群,并受白蚁启发研制出机器人施工队。
但是必须要说明的是,先前研发出的大多数机器人群都只能在二维空间中进行操作,如水和空气等的三维空间对传感和移动等方面有着更高更难的要求与挑战。
图 | 机器鱼
正如这篇论文的第一作者弗洛里安·柏林格(Florian Berlinger)博士说的那样:“通常情况下,机器人被部署在那些人类无法接近或危险的区域,甚至可能是人类完全无法干预的区域。在这种条件下,拥有一个能够自给自足并且具备高自治性的机器人确实对人类很有帮助。通过使用隐形协调和 3D 视觉感知,我们能够创建一个在水下具有高度自治性和灵活性,且即使在 GPS 和 WiFi 等信号无法发挥作用的情况下仍不受影响的系统。”
在机器鱼项目的研究过程中,为了克服这些挑战,研究人员做了一系列相关工作。首先,研究人员将单个机器鱼命名为 Bluebot,给它们都装上蓝色的 LED 灯,并基于此开发了一个和视觉相关的协调系统。然后,每一个机器鱼都事先配备了两个摄像头和三个 LED 灯。
在水下作业中,鱼眼处的镜头相机主要负责侦查相邻 Bluebot 的 LED 灯,并使用自定义算法确定它们之间的距离、方向和航向。通过对 LED 灯光的检测,研究人员能够充分实现令 Blueswarm 表现出如聚集、分散、形成环状等复杂的自组织行为的目标任务。
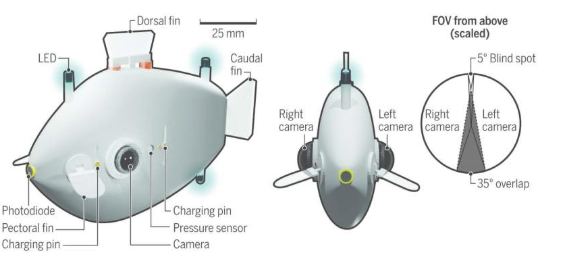
图 | 机器鱼结构图
弗洛里安·柏林格博士说:“每一个 Bluebot 都可以对邻居的位置做出隐形反应。所以,如果我们想要这些机器人聚集在一起,那么每个 Bluebot 就会在计算出它每一个邻居的位置后朝中心移动;如果我们想要这些机器人分散开来,这些 Bluebots 就会做相反的工作;如果我们想要它们作为一个整体,成环状地游泳,它们就会先被按照顺时针的方向编程,然后跟着前方的灯光行进。
不仅如此,研究人员还用灯箱中的红灯模拟了一个简单的搜索任务。研究人员先使用分散算法,让 Bluebots 在水箱中四处散布,直到能够靠近并成功检测到光源为止。一旦 Bluebots 检测到光线,它的LED灯就会开始闪烁,从而触发算法。这样一来,信号机器人周围就会聚集起来 Bluebots。
Nagpal 实验室表示:“Blueswarm 项目的研究成果可以作为研究水下自组织集体行为的重要里程碑。在这项研究中得到的成果将会在未来帮助我们开发微型的水下群,机器鱼们可以在例如珊瑚礁这样视觉丰富但脆弱的环境中进行搜索和监测。同时,该研究还通过综合再现集体行为,为更好地了解鱼群铺平了道路。”
未来,这些机器鱼将能集体行动,完成搜索失事飞机残骸、遇难船只和落水人员等单项任务,甚至在环境监测、水域和珊瑚礁搜索等方面发挥不可忽视的重要作用。
编辑:lyn
-
三维逆向工程的成果及应用案例2016-03-02 3592
-
什么让三维扫描数据栩栩如生2017-08-02 4835
-
三维快速建模技术与三维扫描建模的应用2018-08-07 3880
-
电厂三维安全定位系统迎考察获盛赞2018-10-12 3415
-
三维设计应用案例2019-07-03 2450
-
三维产品动画设计价值2019-08-24 1788
-
三维立体数字沙盘是是什么?2020-08-28 2292
-
SMARTSCAN三维扫描仪电子产品配件三维扫描服务2020-09-17 2035
-
三维可视化的应用和优势2020-12-02 2681
-
如何导入机械臂的三维模型2021-09-07 1596
-
广州三维动画制作流程(一)2021-12-30 1179
-
数字三维景观信息展示系统2010-07-26 535
-
基于proe技术的三维扫描特征建模的范例2017-11-17 951
-
机器鱼混进鱼群内部!研究人员研发仿生机器鱼2021-01-19 3726
-
天远三维携手大族机器人,打造国产机器人全自动三维检测系统2021-04-06 2889
全部0条评论

快来发表一下你的评论吧 !
