

基于PMAC2 PC-104运动控制器实现AGV地面控制系统的设计
描述
自动引导车(AGV) 是现代工业自动化物流系统中的关键设备之一, AGV在地面控制系统的统一调用下能够实现货物自动搬运、无人传送等 。
AGV的工作特点要求AGV控制系统应具备电机多轴控制、多传感器数据实时采集与处理、与上位机数据交换等功能。目前, 由于采用单片机成本低、集成度高、使用方便, 在运动控制中得到广泛应用, 但其很难控制多轴设备; PLC工作可靠、控制的I/O点数多, 但控制2个电机进行插补运动困难, 控制多轴设备的成本高。DSP运动控制卡能够进行2 轴及多轴控制, 价格不高, 但必须和工控机配合使用, 功能还不够完善, 仍需进行大量的软件开发工作。
本文提出一种以PMAC2 PC - 104运动控制器作为控制器的AGV底盘控制系统, 采用PMAC作为控制器使多轴控制变得更简单, 控制系统更具开放性且实时性强。
1AGV系统硬件构成
PMAC ( Programmable Multi-Axis Controller) 是美国Delta Tau数字系统公司推出的一种可编程多轴运动控制器, 它采用Motorola公司的DSP56300处理器作为CPU, 可以实现最多8个坐标系同时运动,可以通过存储在其内部的程序单独操作 , 使用PMAC作为AGV控制器, 物理结构可以大大简化,系统设计和调试过程也变得更简单。
AGV采用4轮- 双轮驱动, 左右2个同轴轮独立驱动, 通过2轮差速实现AGV行驶状态的调整, 适宜采用PMAC运动控制器作为系统的核心处理器, 为了实现PMAC 多轴控制功能, 需在PMAC板上扩展相应的I/O接口板, 同时采用伺服电机、伺服驱动单元、编码器以及相应的传感器构成1套完整的开放式AGV 控制系统, 见图1。
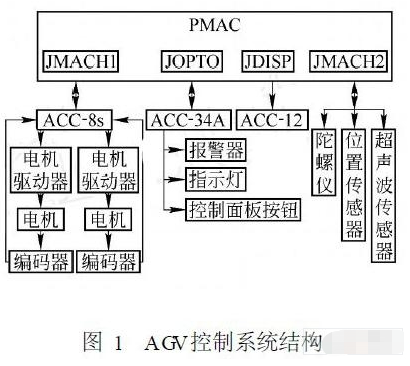
其中PMAC主要实现对AGV驱动电机、控制面板开关量以及报警装置的控制。
2AGV控制系统伺服环设置
为保证AGV运行时的精确性和稳定性, 电机控制采用速度、位置双反馈系统, 如图2 所示。变量lx03指向寄存器地址$720作为位置编码器的地址 , 在每一个伺服周期闭上位置环。电机编码器的数据经过处理后存储到lx03 指定的地址,闭上位置环。变量lx04指向寄存器地址$721作为速度编码器的地址, 在每一个伺服周期闭上速度环。陀螺仪的数据经过处理后存储到lx04指定的地址, 闭上速度环。使用双反馈系统需将lx25变量设置为1, 以打开PMAC的硬件位置捕获功能,提高控制精度。

3上位机通信程序编制
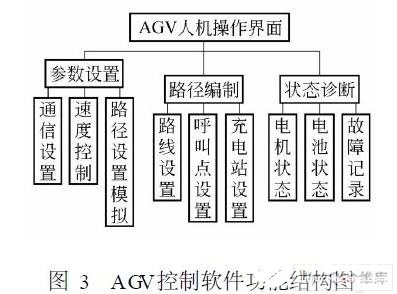
AGV控制软件使用Visual C + +进行设计, 通过PMAC的各种参数设置实现对AGV小车运动路线的控制, 如图3所示。AGV 控制软件主要实现参数设置、路径编制、状态诊断功能。
Delta Tau公司为PMAC提供了PComm32动态链接库, 作为上层应用程序与PMAC通讯的桥梁。PComm32包含所有上位机与PMAC 之间通信的200多个函数。
AGV控制软件通过调用PComm32 中的函数实现对PMAC的控制, PComm32包括PMAC1dll、PMAC1VXD、PMAC1SYS 3 部分, 利用其提供的动态链接库并结合Visual C + +编程, 通过调用动态链接库提供的OPENPmacDevice () 、CLOSEP2macDevice () 、PmacGetResponse () 、PmacFlush ()等函数, PC 机将AGV 每个动作的相关数据以ASC II码指令的形式发送至PMAC, 从而实现控制软件与PMAC之间的命令和信息交换。PMAC执行顺时针圆弧运动的PMAC 驱动命令程序如下:
CLOSE
&1#1 - 》 4000X设置坐标系
#2 - 》 4000Y
OPEN PROG 10 CLEAR
GOSUB 20000调用圆心计算子程序
Q0 =Q3 - Q9求圆心到终点的角度
Q27 =ATAN2 (Q4 - Q10)
WH ILE (Q28 Q11 =Q9 +Q5*COS(Q28) 圆弧X坐标
Q12 =Q10 +Q5SIN (Q28) 圆弧Y坐标
X (Q11) Y(Q12) 部分运动
Q28 =Q28 +Q8角度增加
ENDWH ILE
X (Q3) Y(Q4)终运动
RETURN
N20000计算圆心子程序
Q20 = SQRT( (Q3 - Q1) * (Q3 - Q1) + (Q4 - Q2) *(Q4 - Q2) )
Q21 =Q5* Q5 - Q20* Q20 /4
FQ23 = SQRT(Q21)
Q0 =Q3 - Q1
Q24 =ATAN2 (Q4 - Q2)起点到终点的角度
Q0 =Q20 /2
Q25 =ATAN2 (Q23) 中心离开中线的角度
Q26 =Q24 - Q25
Q9 =Q1 +Q5* COS(Q26) 中心X坐标
Q10 =Q2 +Q5* SIN (Q26) 中心Y坐标
RETURN
CLOSE
4结束语
AGV集光、机、电、计算机为一体, 综合了当今科技领域先进的理论和应用技术。以PMAC作为控制器, 能够满足AGV运动的高实时和高精度的要求, 其开放结构易于今后产品线的更新换代和系统的移植。
责任编辑:gt
-
运动控制系统的基本方程2021-09-15 1745
-
PMAC运动控制卡学习笔记2021-09-07 2703
-
介绍自动导引车(AGV)简易车载控制系统的实现过程2021-07-28 2814
-
怎么设计基于PC和FPGA的运动控制系统?2019-08-28 2881
-
PMAC可编程多轴运动控制器的详细资料合集免费下载2019-08-09 1954
-
【EG4S20-MINI-DEV 申请】AGV运动逻辑控制器开发2019-06-24 1455
-
AGV控制系统分析 并应用PMAC运动控制卡2018-10-08 11097
-
TURBO系列PMAC和PMAC2 SRM软件中文手册详细概述2018-06-05 2617
-
AGV系统构成2015-12-22 6807
-
基于ARM Cortex-M3的运动控制系统与算法设计2013-09-25 1185
-
基于PC-104和虚拟仪器的某机载电台检测控制器2013-06-25 981
-
基于PMAC2 PC - 104运动控制器的AGV底盘控制系2010-08-11 2723
-
基于PMAC的开放式机器人控制系统2009-09-25 1274
-
基于PC-104 的航空发动机地面综合检查仪2009-08-07 723
全部0条评论

快来发表一下你的评论吧 !
