

基于磁阻传感器和RS485总线实现弹体滚转角测量系统的应用方案
描述
1 引言
纵观国内外各种不同的制导技术和弹道修正技术.最关键的一点总是离不开实时获取与利用精确的弹道参数.尤其以姿态数据的获取最为重要。只有实时准确地获取了有用的弹道参数,才能正确解算出弹道偏差,进而确定修正力系以及修正时机,提高弹道修正弹的精度。
当前国内外测量滚转姿态的方法各有优缺点:利用GPS测量精度高,但是易受国外技术封锁;利用太阳方位角遥测法的成本比较高,不可能在现有弹药的基础上大量装备:而利用加速度计测量方法产生的初始对准误差有积累效应.目前仍未能有效解决。因此,研制能有效提高弹体滚转姿态探测精度、抗高过载并能充分利用现有弹药的方法及组件迫在眉睫。而利用地磁场为参考进行探测,原理简单,可以全天候工作,抗高过载能力强,同时具有好的频响,是实现上述要求的最好途径之一。
地磁导航(GNS)具有隐蔽性能好、即开即用、误差不随时间积累等特点,可以弥补惯性导航长期误差积累的不足。这里借鉴磁航向系统的研究成果,将地磁场矢量作为弹体滚转测量的基准矢量,进而解算弹体的滚转角。地磁传感器种类很多,其中磁阻传感器(MR)具有抗过载能力强、精度高、体积小、重量轻、价格便宜等优点,适合作为弹载测量工具。
2 磁传感器选择
2.1 磁传感器
(1)磁通门传感器 磁通门磁强计是测量磁场强度的一种传感器,其测量原理是通过对被测磁场的磁通进行调制获得一个反映被测磁场强度的交变信号。磁通门可以在制造工艺上使其非常敏感,分辨率最低为1μOe,可以测量直流或交流磁场频率的上限约为10 kHz。它们的尺寸规格较大,价格昂贵。
(2)霍尔效应磁传感器 100多年前发现的霍尔效应,由于一般材料的霍尔系数都很小而难以应用,直到半导体问世后才真正用于磁场测量。其优点是体积小,重量轻,功耗小,价格便宜,接口电路简单,特别适用于强磁场的测量。但是,它又有灵敏度低,噪声大,温度性能差等缺点。虽然有些高灵敏度或采取了聚磁措施的霍尔器件也能用于测量地磁场.但一般都是用于要求不高的场合。
(3)磁阻传感器 是利用合金电阻对某一个方向磁场敏感的原理制成。采用MR传感器进行探测有下列优点:尺寸小,高灵敏度,内阻抗小,使其对电磁噪声和干扰不敏感:无转动部件,使其具有高可靠性;部件能方便地装入插板产品中,而使实施成本降低;成本低、精度高、响应速度快、无漂移误差、抗冲击抗过载能力强等。
(4)巨磁阻效应传感器 巨磁阻效应(GMR)是最近才发现的现象,它基于电子通过数层叠层,非常薄的铁磁层和非磁性层(25“50埃)之间的界面散射。当两个相邻的铁磁层有反向磁化强度时,电阻要高于它们在同一方向上的磁化强度矢量。迄今为止,GMR效应需要工作在高强度的磁场并伴有高分贝噪声,这使得它不能应用于大范围的传感器产品中。电阻变化所需的磁场变化需从10 0e到几千0e,而灵敏度尚未达到MR或磁通门装置的灵敏度。但正继续朝着开发更低磁场的方向发展。
综上所述,该地磁测量系统中,选用磁阻传感器作为地磁测量元件最为合适。
2.2 磁阻传感器
磁阻传感器是利用合金电阻对某一个方向磁场敏感的原理制成。由于磁阻传感器本身是固态,电阻的体积可以做的很小且没有活动部件,功耗也很低,配合选用体积小、功耗低的外围器件,可以将探测系统微型化,已经有逐步取代磁通门的趋势。因此,非常适用于制导火箭弹系统进行地磁矢量测量。各向异性磁阻传感器是根据在铁磁性材料中会发生磁阻的非均质现象研制的,在硅衬底上制作4个相同的铁镍合金带形成惠斯通电桥,其具体工作原理如图1所示。
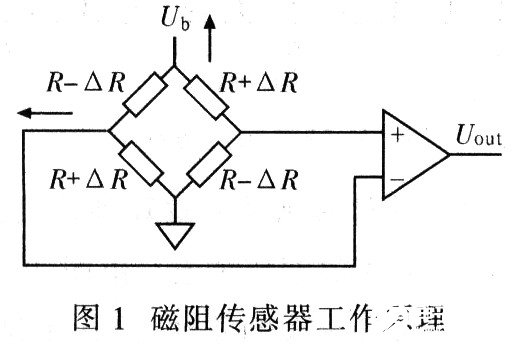
用4个磁控电阻器制成的惠斯通电桥带有供电电压Ub,使电流通过电阻器。电阻器是同一结构材料,则4个电阻器的电阻是相同的,阻值为R。如图1所示箭头方向给电阻器施加正交偏置磁场,会导致电阻器发生磁化,进而发生阻值的改变。同向放置的两个电阻器阻值增加△R,另两个与其相反放置的电阻器阻值减小△R。电桥输出为:

在外磁场的作用下,内部磁阻的变化引起输出管脚0UT+,0UT一两端电压的变化,其电压的幅值表示所测磁场的强度。如果将三维磁阻传感器按照载体三维坐标系安装,通过测量载体空间磁场的三维磁感应强度,按照一定的算法就可以计算出载体在空间的姿态信息。
3 捷联式MR测角系统设计
3.1 主要技术指标
该测试系统要求对旋转轴对称弹丸的滚转姿态参数实现实时准确的测量。测角系统所要达到的技术指标要求如下:
(1)滚转角速率 0~30 r/s
(2)测量范围 0°~360°
(3)测量精度 l°
(4)响应时间40μs
(5)温度范围 一40℃~85℃
(6)电源 ±15 V.0.5 A
3.2 磁信号采集系统设计
滚转角测量系统由两个Honeywell磁阻传感器HMCl052、电源转换电路、信号调理电路、微控制器电路、S/R校准电路等组成,如图2所示。

电源转换电路给磁阻传感器和测量系统工作提供必须的直流稳定电压,选用AD680作为基准电源。
信号调理电路包括信号放大和低通滤波两部分。由于传感器的桥压为5 V,地磁场的典型值为0.5~0.6 Guass,则由传感器输出特性曲线可知在磁场范围为±2 Guass时输出电压信号为±20 mV,这么微弱的信号须经过放大才能传给后续电路。故需要采用高精度运算放大器或测量放大器。这里设计选用美国模拟器件公司的仪表放大器AMP04,并由AD680提供给放大器2.5 V的基准电压。
直接输出的信号含有大量的干扰“毛刺”,若采用大量的软件滤波会增加系统的开销,降低系统的实时性。因此,对传感器输出低通滤波后,才进行数据采集。这里选用MAX291,它是一个8阶低通Butterworth型滤波器。
模拟滤波后的数据经过A/D转换为数字信号送入DSP处理。要求在规定的时间间隔内完成对信号的采集和处理,包括以下几部分:三通道信号的采集、信号的数字滤波、误差的自动补偿、滚转角的解算以及信号的存储。对CPU提出很高的要求,因此必须采用高速度的数字信号处理器。考虑后续对脉冲发动机实时控制的方便性,同时考虑系统的算法和精度要求,设计选用最佳测控应用的定点DSP器件TMS320VC5416。
实验过程中采用RS485接口总线实现测试的监视、控制和数据共享、显示数据,提供操作的软面板。
4 磁测角系统精度分析
4.1 磁阻传感器自身性能引起的测角误差
参考HMCl052的技术参数,通过计算在表l列出了其自身性能引起的测角误差。

表1由参考文献按照线性关系计算得出。
由表1可见.若传感器总误差控制在0.5 mgauss以下.那么总测角误差不会超过0.051°。即

4.2 其他器件引起的测角误差
(1)放大器误差 传感器的桥压为5 V,地磁场的典型值为0.5”0.6 Guass(1 G=10-4T),则由传感器输出特性曲线可知在磁场范围为±2Guass时输出电压信号为±20 mV,这么微弱的信号须经过放大才能传给后续电路。参考AMP04的技术参数.按照线性关系计算,综合温度变化引起的误差和输出产生的线性度误差,得到该放大器的误差小于0.022°。
(2)A/D转换的分辨率 若要求测角误差小于0.1°,则应选择最小12位的A/D转换器。选用了ADI公司的14位A/D转换器AD7865,它的主要误差是量化误差和线性误差。量化误差=0.030%,线性误差=0.012%(FSR),那么转换为角度误差为0.024°。
(3)温度变化引起的误差 磁传感器的温度漂移是不匹配的,会对测角输出有直接影响。可以对此补偿的一个简单方法是用Set/Reset,可以消除温漂、整流偏移电压、运放偏移电压以及运放的温度漂移。使用此方法,可使磁读数受温度的影响控制在小于0.01%,即超过50℃的温度变化,转换为角度误差小于0.029°。
通过上述误差估算,可以看出传感器和信号的放大电路部分仍然是影响系统精度的最关键部分。以上分析的各部分误差经过计算,得到综合误差为0.067°。一般要求器件的误差要优于系统给定性能指标的10倍。则上述该误差的10倍为0.67°,且小于精度是l°的测角要求。
5 磁测量系统的实时性设计
对于360°滚转姿态的测量.实时性非常重要.它直接影响到弹道修正的效果。当弹体的滚转速率为30 r/s时,如果测量精度要达到1°.那么每度的响应时间可由下式给出:

对于整个角度测量系统来说.响应时间的分配是至关重要的。设双轴磁阻传感器的响应时间为ts,A/D转换时间为tad,RS485通信输出时间为t485,解算算法时间为tds,则系统响应时间为:

由上式可见,角度测量系统的实时性设计主要就是上述各量的实时性设计.其中只有解算算法时间需要软件实时性设计,其他则需要硬件实时性设计。角度解算的关键在于非线性方程组的求解。
说明:
(1)经过公式和实验可得所设计的角度测量装置的响应时间小于40μs,远小于92.6μs的系统要求;
(2)92.6μs的系统时间要求是建立在弹体滚转速度为30 r/s的条件下的.而现实中GPS制导弹药还没有达到这个转速。
综上两点,系统的实时性完全可以满足。
6 实验数据分析
弹体滚转角测量系统的滚转解算研究是以当地地磁矢量为基准进行的,在测量实验时三轴高精度转台输入的数据是10 r/s,系统采样时间是0.1 ms。转台外框和中框保持不动,对应于弹体运动时俯仰角和偏航角保持不变的状态。对测角系统输出的数据,采用中值滤波联合小波强制滤波的去噪方法,滚转解算是依据滤波后的平滑信号进行的,如图3所示。

可见,用地磁传感器的测量来解算弹体的滚转角是可行的,能够很好的反映弹体的滚转姿态。由图3可见:解算的滚转角图形线性度较差,有较大的波动,尤其在起始段。由于起始段干扰影响严重,尤其是实验中电机起动时影响最大。故在实际弹上应用过程中,要想达到理想的精度要求,必须对各种于扰因素予以研究并进行误差补偿。
责任编辑:gt
-
RS485总线浪涌解决方案!2023-09-18 3240
-
RS-485典型配网结构 RS485总线优缺点2024-02-02 11346
-
嘉准RS485数字通讯传感器:实时回传检测数据,赋能智能工厂2026-07-30 491
-
RS485信号联网通讯距离传感器2019-03-11 2936
-
RS485总线接口软件设计2019-06-14 1794
-
一种基于FPGA/MCU的光电式滚转角测量仪设计2019-07-08 1436
-
工控机一个RS485接口如何采集多个传感器信号?2020-07-02 11311
-
高精度滚转角干涉仪2009-06-30 941
-
采用FPGA/MCU技术的光电式滚转角测量仪的解决方案2010-07-06 1179
-
HDLC协议RS485总线控制器的FPGA实现2012-02-14 2266
-
一种滚转角速度测量系统2017-11-01 912
-
什么是rs485总线总线通讯协议?2017-11-06 68844
-
基于ARM9与LINUX的RS485总线的通信接口设计2017-12-07 12123
-
如何使用传感器和RS485设计关节臂式坐标测量机多参数数据采集系统2019-11-28 1288
-
RS485总线在连接时为什么要屏蔽接地?2024-01-04 4293
全部0条评论

快来发表一下你的评论吧 !
