

香港中文大学开发出“FreeBOT”球形机器人
描述
香港中文大学的研究团队开发了“FreeBOT”球形机器人,其大小比垒球略大,可以在平面上滚动并在墙壁和斜坡上攀爬。机器人彼此粘在一起,也可以彼此分开,并共同创造各种形状和动作。
FreeBOT模块是一个内部装有磁铁的球形机器人,它由两部分组成:磁铁球形壳体和内部驱动机构。内部驱动机构有两个轮子,并由两个直流电动机通过齿轮驱动。内轮在球壳中的位置通过电机控制,并且独立在平面上滚动。强大的内部磁体允许在铁磁壁上垂直移动。
原型的内部结构
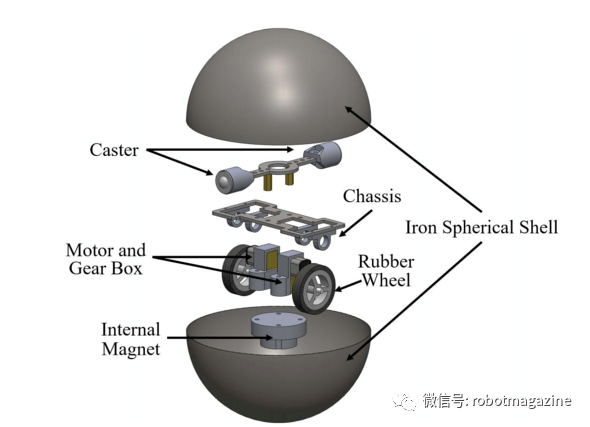
FreeBOT的分解图
FreeBOT内部磁铁很小,但是会产生很强的外部磁场。它集成了其他模块,以便被磁场吸引,甚至在集成后也沿模块移动。由于几乎整个模块都是接触点,集成机器人组可以各种形状移动。例如,两个机器人可以一起工作以攀登非铁磁纸板台阶,或攀登其他模块(例如梯子)。
原文标题:一组球形协作移动的机器人“Free BOT”
文章出处:【微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 机器人
-
国外手术机器人新技术开发情况2011-03-01 5832
-
变色龙机器人DARPA研发出可变色硅胶机器人2012-08-20 7559
-
表情机器人网络大赛2012-09-15 4710
-
人形机器人的关节技术能不能使用球形关节?2015-09-04 9783
-
机器人与未来2015-12-29 6544
-
微型机器人由哪些部分组成2021-09-10 1651
-
设计一种可用于大学和学校教授机器人技术的机器人2022-07-25 1827
-
首个可用磁场控制的可生物降解纳米机器人问世2017-11-27 1452
-
斯坦福大学开发出全新四足机器人 旨在推进机器人研究和实际应用2019-05-23 4294
-
香港中文大学刘云辉教授阐释工业车在物流体系中的运用2019-06-06 5057
-
香港中文大学研发出最新医疗监测系统2019-07-14 1955
-
香港中文大学研发出医疗监测系统2019-07-29 1535
-
未来机器人(深圳)有限公司获得1亿元B1轮融资2020-06-30 3154
-
磁性FreeBOT球体机器人技术得到飞跃2020-11-30 2301
-
浙江大学教授开发出真空驱动的柔性机器人2021-03-08 3443
全部0条评论

快来发表一下你的评论吧 !
