

基于FINS/UDP方式实现OMRON PLC与上位机的通信设计
描述
在现代工业自动化控制系统中,可编程逻辑控制器(PLC)作为常用的现场控制设备,上位机作为数据采集及人机界面的一种已经得到广泛使用。过去,在工程项目开发中,PLC和上位机间的通信常采用RS-232C或者RS-485串行方式,这种方法很难满足数据量大、通信距离远、实时性要求高的控制系统。随着互联网技术的发展、普及与推广,以太网技术得到了迅速的发展,其传输速率的提高和交换技术的应用,解决了以太网通信的非确定性问题,使得工业以太网能够广泛应用于工业信息控制领域,也是工业信息控制未来的发展趋势。
FINS(factory inteRFace network service)通信协议是欧姆龙公司开发的用于工业自动化控制网络的指令/响应系统。使用FINS指令可实现各种网络间的无缝通信,包括用于信息网络的 Etherne(以太网),用于控制网络的Controller Link和SYSMAC LINK。通过编程发送FINS指令,上位机或PLC就能够读写另一个PLC数据区的内容,甚至控制其运行状态,从而简化了用户程序。FINS协议支持工业以太网,这就为OMRON PLC与上位机以太网通信的实现提供了可能。
1 OMRON PLC与上位机通信方式
目前,在欧姆龙PLC网络组成中,上位机和PLC的通信可以采用RS232C/485串行通信、Controller Link通信和工业以太网通信三种方式。它们的主要性能参数如表1所示。
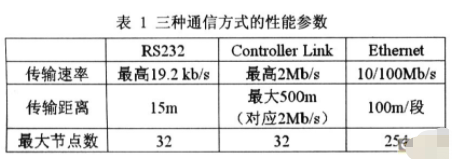
文献介绍了采用RS232C/485串行通信的方案,其通信速率仅为9600b/s,速率较慢,很难适应现代数据量大、通信距离较远、实时性要求较高的控制系统。
文献中给出了基于FINS协议的Controller Link通信的设计方案,其最高速率可以达到2Mb/s,整个网络的最大传输距离为500m,硬件上需要在上位机安装CLK支持卡,其扩展性及应用的灵活性没有工业以太网好。
在三种通信方式中,工业以太网的优势是相当明显的。其传输速率可以达到10/100Mb/s(取决于实际网络环境);两个节点之间的传输距离可以达到 100m,对于整个网络的传输距离没有限制;网络内最大节点数可以达到254个,可以实现1(PLC):N(PC)、N:N、N:1等多种网络形式。这些都为构架各种规模的工业网络信息系统提供了有利的条件,具有良好的扩展性、实用性、灵活性。目前使用的上位机都配有以太网卡,所以上位机侧无需增加额外的硬件设备。因此,采用工业以太网方式对提高工厂的自动化信息控制水平具有很大的现实意义。
2 以太网FINS通信
在以太网FINS通信中,各种数据信息是以UDP/IP包或者TCP/IP包的方式在以太网上发送和接收的。其中,在Internet层远程设备使用的是 IP地址,而在应用层使用的则是FINS节点地址。传输层中定义了本地UDP或TCP端口号,它为应用层(即FINS通信)提供通信端口,其默认设置为 9600。用户可以根据实际情况自行修改,但是在同一网络中,各设备的通信端口号必须保持一致。图1 FINS以太网通信协议模型
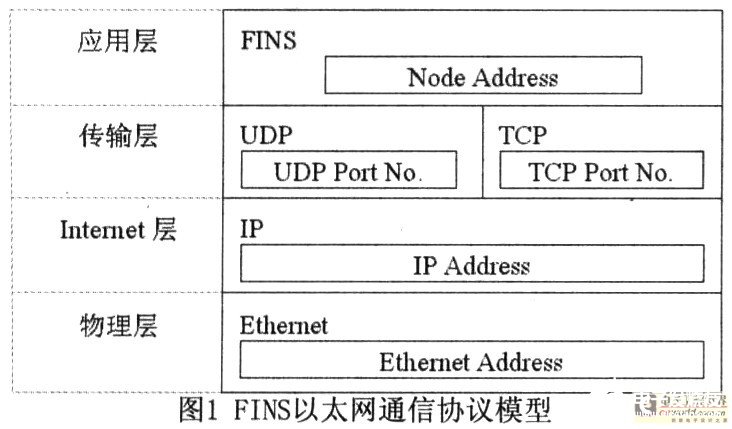
通常以太网通信使用的是IP地址,而在FINS通信中则是使用网络号、节点号以及单元号来对不同设备(包括PLC、PC等现场设备)进行地址定义的。这就为不同网络之间各种设备的通信提供了统一的寻址方式。在以太网FINS通信中,欧姆龙的以太网单元一项重要的功能就是能在IP地址和Fins节点地址之间进行转换,其转换方式有自动转换、IP地址表和复合地址表三种方式,其地址转换数量依据模块型号和转换方式的不同还有相应的限制。以太网FINS通信服务是一种基于UDP/IP的通信方式,称为FINS/UDP方式,欧姆龙相关的以太网产品都支持这种方式。此外,CS1W-ETN21和CJ1W- ETN21以太网通信模块还支持TCP/IP协议,称为FINS/TCP方式。
2.1 FINS/UDP方式
FINS/UDP方式是一种使用UDP/IP协议的FINS通信方式。UDP/IP是一种无连接的通信协议。当一条信息从一个节点发到另一个时,这两个节点是没有明确连接的对等关系的。UDP协议具有较快的传输速度,但是数据通信的可靠性没有TCP协议高。

如图2所示,是一个在以太网中发送和接收所使用的UDP帧结构。FINS/UDP方式使用的是一种嵌套格式数据包,即Ethernet报头、IP报头、 UDP报头和FINS帧。一个UDP数据段(FINS 帧)超过1472字节将被分成若干个数据包来传送。分开的UDP数据将在UDP/IP协议层自动组合。通常不需要关注应用层的数据分段,但是在一个多层 IP网络中1427字节的UDP包可能无法发送。在这种系统中就需要使用FINS/TCP方式。
2.2 FINS帧结构
FINS 帧分为FINS指令帧和FINS响应帧两种形式。指令帧在发送FINS指令时使用,响应帧则在接收到FINS指令后对其返回响应时使用。它们都是由一个 FINS报头(存储传输控制信息)、一个FINS指令域(存储一个FINS指令)以及一个FINS参数/数据域(存储指令参数和发送/响应数据)所组成的。响应帧FINS指令域的内容与所接收到的指令帧的FINS指令域相同。具体结构见图3、图4。
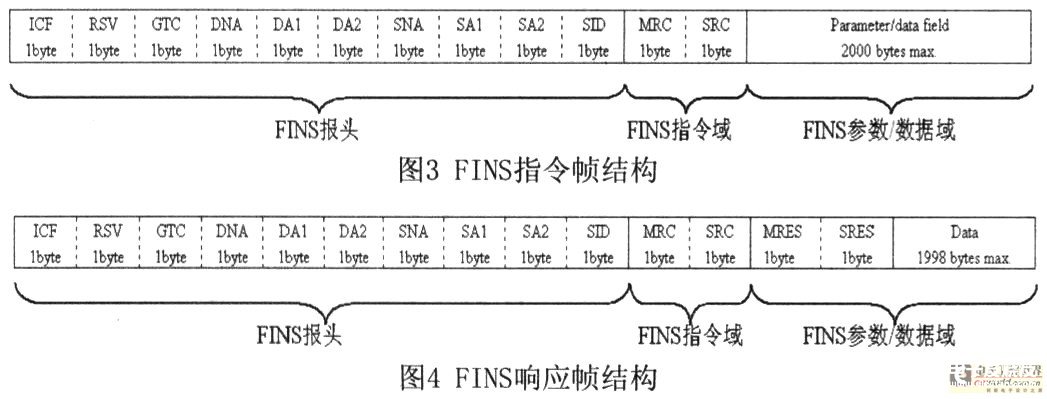
ICF为信息控制域,用于标明指令和响应;RSV为系统保留;GCT为网关允许数目;DNA为目的网络号;DA1为目的节点号;DA2为目的单元号;SNA为源网络号;SA1为源节点号;SA2为源单元号;SID为服务和响应的标识号,可任意设置,指令和响应对应相同;MRC和SRC分别为 FINS指令的主指令和从指令;参数/数据域,用于标明所操作的数据地址、范围等,在响应帧中前两个字节MRES和SRES构成响应码,用来诊断错误信息。
3 FinsGateway和SYSMAC Compolet控件介绍
FinsGateway是OMRON FINS通信协议的驱动程序,它为计算机上的32位Windows操作系统提供一个工业自动化网络环境。FinsGateway集成了不同的网络协议,并为FINS通信和数据链接提供驱动程序和接口库函数。它通过创建高性能的虚拟存储区EventMemory,为不同的用户程序提供数据的接入和共享。利用 FinsGateway,计算机可以通过各层网络(包括网络互联)访问网络上的PLC,通过接口库函数,用户还可以开发程序。
SYSMAC Compolet是欧姆龙公司专门为FINS通信开发的Active X控件,它是架构在FinsGateway这个驱动程序下的VB控件,对Fins指令做了进一步集成和优化。SYSMAC Compolet为SYSMAC C/CS1/CV系列的PLC提供应用程序编程接口,在开发时只需要调用该控件,编写程序更便捷,语句更简单,配合使用FinsGateway,通过计算机就可以方便地控制访问PLC,直接对其操作而不需要掌握相应的Fins指令知识。
4 OMRON PLC与上位机以太网通信的实现
OMRON PLC与上位机的以太网通信依靠发送FINS指令实现。上位机发送FINS指令可以直接读取或写入PLC相应的数据,PLC部分无需编写接收和发送程序。文献给出了运用VC++异步套接字类CAsyncSocket与OMRON PLC进行以太网通信的方法。本例中采用FINS/UDP方式,具体如图7所示。上位机利用Visual Basic 6.0进行程序开发,具体实现向PLC发送FINS指令(读取内存区域,指令代码0101)读取DM100开始的150个字数据的功能。相较于文献 介绍的方法,本文中为不同层次的使用者提供了三种方法来实现这一个功能,增加了系统开发的选择性。图7上位机与PLC通过以太网通信
在进行上位机程序编程之前首先要完成上位机和PLC的以太网单元的设置。
(1)设置上位机的IP地址为10.72.18.11,子网掩码为255.255.255.0,它的FINS节点号默认为11。
(2)通过欧姆龙CX-Programmer软件,在IO表中将PLC CSIW-ETN11以太网单元的IP地址设置为10.72.18.19,子网掩码为255.255.255.0,FINS节点号设置为19。地址转换方式设置为自动生成(动态)。FINS/UDP端口为9600(默认)。保存后下传至PLC。
下面主要介绍三种方法来实现上述功能。
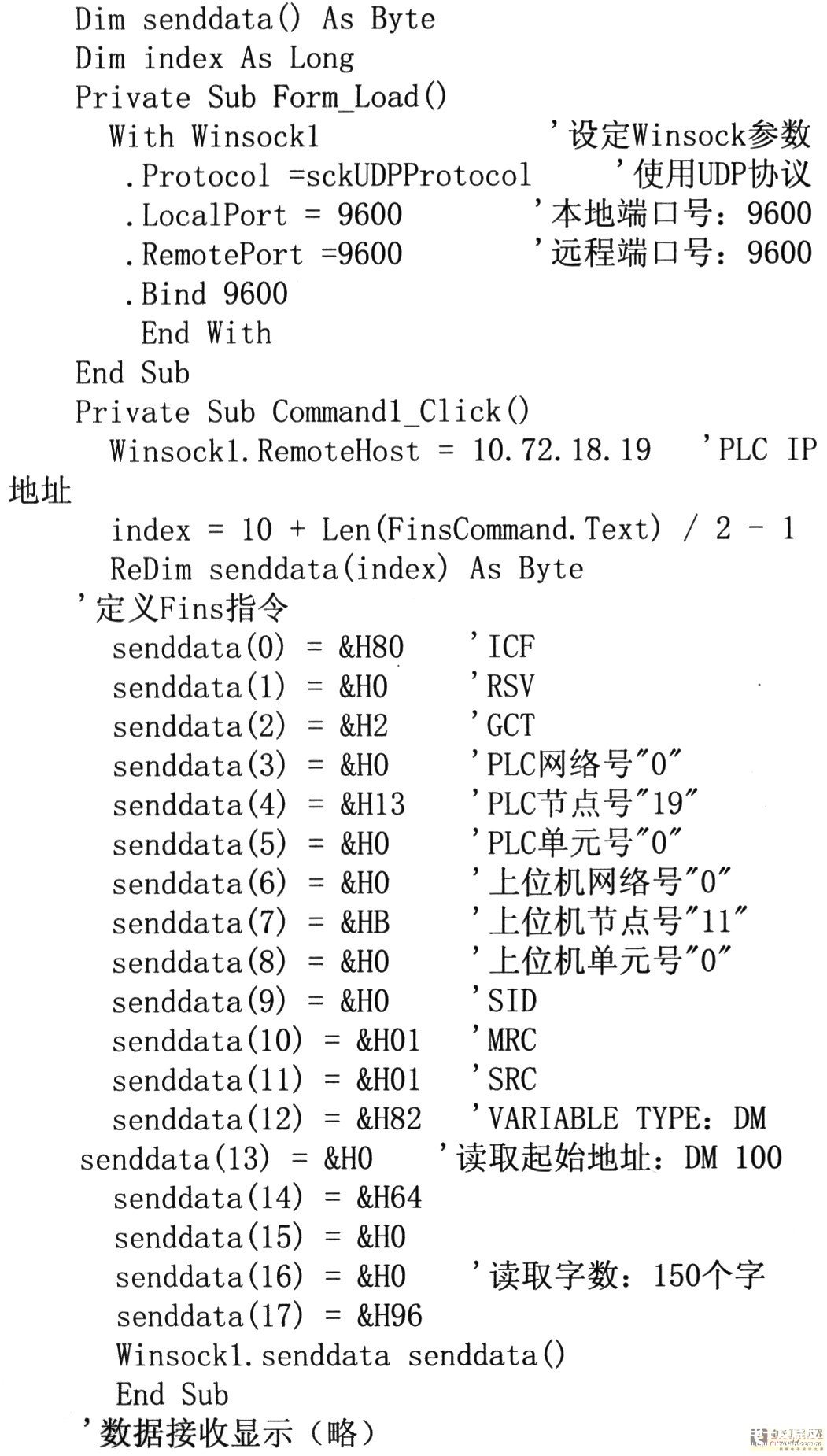
4.1 使用Micosoft Wi nsock控件
在VB中新建一个Standard.EXE文件。添加Winsock控件,对象命名为“Winsock1”,发送Fins命令程序如下:
编译保存后即可。
4.2 使用FINSGateway中的OMRON FinsMessaging Control
(1)在上位机中安装Finsgateway软件,并在Service Manager中启动CPU_UNIT和ETN_UNIT。
(2)ETN UNIT属性中,在“UDP Nodes”中手动添加PLC的IP地址(10.72.18.19)和FINS地址(0.19.0)。在“Commuincation Unit Settings”中设置端口号(9600)和FINS-IP地址转换方式为自动生成(动态)。
(3)在VB中新建一个standard.EXE文件。添加OMRON FinsGateway FinsMessaging Control,对象名为“FinsMsgl”。
(4)在form区添加一个Command button(命名为“Command1”)作为发送Fins指令之用;同时添加一个textbox(命名为“Text1”)作为显示所接受数据之用。
(5)在“Conmand1”中的“Click”事件中添加如下代码:
Private Sub Command1_C1ick()FinsMsg1.sendFinsCommand0,19,0,“0101820064000096”End Sub
在“FinsMsg1”中的“OnReceive”事件中添加如下代码:
Private Sub FinsMsg1_OnReceive ()
Dim net As Integer,node As Integer,unit AsInteger
Text1.Text=Fins Msg1.receive Message(net,node,unit,vbString)
End Sub
编译保存后即可。
4.3 使用FinsGateway和SYSMAC Compolet
(1)在上位机中安装Fins Gateway和SYSMACCompolet软件。启动FinsGateway的Service Manager,并启动CPU UNIT和ETN UNIT。
(2)同4.2中第(2)点。
(3)在VB中新建一个Standard.EXE文件。添加OMRON SYSMAC CS Control,对象名为“SYSMAC CS11”。
(4)在对象“SYSMACCS11”属性中,选择“Communication”标签,选中“ActivateCoCommunication”并设置PLC的Fins地址(0.19.0)。
(5)在form区添加一个Command button(命名为“Command1”)作为发送Fins指令之用;同时添加一个text box(命名为“Text1”)作为显示所接受数据之用。
(6)在“Conmand1”中的“Click”事件中添加如下代码:
Private Sub Command1_Click()
Text1.Text=SYSMAC_CS1 1.readArea(plcAreaDM,100,150,vbString)
End Sub
编译保存后即可。
5 结束语
工业以太网作为工业现场信息采集的重要网络具有速率高、通信距离远、抗干扰性好等特点,已经得到广泛应用。本文所介绍的三种OMRON PLC与上位机以太网通信的方法均在实际工程中验证成功。这三种方法从本质上来说其实是一样的,但具体使用和实现过程有所不同。第一种方法不需要另外购置欧姆龙相关软件,但需要对FINS通信底层协议以及Fins帧结构及其封装过程有比较全面的了解,程序编写较为复杂,适用于有一定开发经验的高级用户。第二种方法需要掌握Fin s帧结构以及FinsGateway的相关配置,但是对发送指令和接收数据的程序编写较为简单,适用于中级用户。在第三种方法中,使用了SYSMAC Compolet中简单易懂的编程语言,即可完成上位机的程序开发,整个程序编写过程简单明了,可以大幅缩减通信程序的开发时间,适用于那些开发经验较少的初级用户。后面两种方法需要另外购置欧姆龙软件,这是在程序开发时需要注意的。这三种方法都可利用工业以太网实现OMRON PLC与上位机的通信,具有实时性好、速度快、可靠性高、运行稳定等优点。在PLC控制系统中采用以太网单元通信后,使工业自动化与生产管理自动化有机地结合到了一起,简化了系统设计。
责任编辑:gt
-
上位机与PLC的以太网通信方法2024-06-18 7699
-
上位机怎么给plc信号输出2024-06-06 4097
-
TCP通信UDP通信串口通信C#上位机2023-05-08 691
-
C#使用欧姆龙PLC的Fins协议读写PLC地址(基本封装)2023-04-18 1289
-
上位机发送FINS UDP命令读写PLC数据2022-04-06 1295
-
如何去实现上位机和PLC之间的高速通信?2021-06-02 2966
-
S7系列PLC上位机通信及PRODAVE软件包在上位机中的使用资料说明2020-01-10 1841
-
FINS通信协议实现OMRON PLC与上位机的以太网通信设计方案2019-09-30 36378
-
FPGA与上位机UDP连接通信2019-02-22 8106
-
PLC上位机通信系统的实现(VB编写)2017-11-08 1715
-
OMRON PLC在以太网中的通信及实现2011-11-23 1009
-
基于FINS协议的OMRON PLC与上位机以太网通信的实现2009-11-24 2834
-
上位机与PLC的通信与监控设计2009-11-14 1323
-
利用VC++6.0实现上位机与PLC的串行通信2009-09-01 808
全部0条评论

快来发表一下你的评论吧 !
