

基于微波雷达和激光技术实现高速视频超速监控系统的设计
描述
作者:孙华燕,李迎春,唐黎明
介绍了一种高速公路视频超速监控系统的硬件构成、软件功能和动目标检测、动目标跟踪与速度测量、车牌自动定位以及车牌字符自动识别等关键技术的实现方法。该系统可广泛应用于高速公路管理、卡口管理、巡逻执勤、逃逸车辆抓捕等场合,具有很好的应用前景。
随着国民经济的迅猛发展,我国的高速公路建立发生了翻天覆地的变化。公路上行驶的车辆越来越多、速度也越来越快,与车辆交通有关的案件也呈不断上升势头,交通肈事逃逸等案件时有发生。如何运用科学的手段帮助公安部门有效控制高速公路上超速违章现象、抓捕逃逸车辆,已成为公安交通部门急待解决的问题。目前能完成超速监控功能的成熟系统有:基于微波雷达和基于激光的超速监控系统。它在车辆经过时,利用反射波的频率变化监控在车辆信息,不能提供超速汽车类型、车牌号码等全面的交通信息,无法及时进行违章处理及抓捕逃逸车辆。
本高速公路视频超速监控系统利用视频图像处理技术,对高速公路车道上的汽车进行非接触式监控,获得超速车辆车速、车牌号码、违章照片等运行状态信息,可应用于高速公路管理、逃逸车辆抓捕等场合。
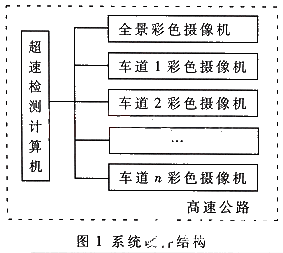
1 系统结构
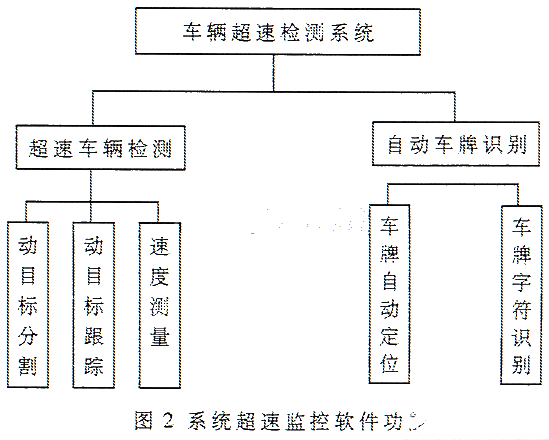
高速公路视频超速监控系统的硬件结构如图1所示。它由超速监控摄像头和现场计算机等部分组成。在高速公路上安装监控摄像头(一个彩色全景摄像机、n个车道级彩色摄像机)及超速监控计算机,24小时实时监控高速公路上所有通过车辆的车速信息。系统软件包含超速车辆检测和自动车牌识别两部门。超速监控计算机通过实时视频采集卡首先采集高速公路的全景图像,并利用全景图像进行超速车辆检测;如检测到违章车辆,启动相应车道的摄像机工作,采集近景图像并用利近景图像自动车牌识别,其识别结果可分车牌号码字符、车牌号码照片、汽车违章照片分别修配存到超速违章车辆数据库,以供事后处理;如需要,还可通过无线、有线或光纤通信网自动向高速公路收费站的违章处理服务器传送违章车辆的车牌号码、违章照片信息,以实时进行违章处理。软件系统功能框图如图2所示。
2 软件功能实现
2.1 动目标分割
理想情况下,从视频图像进行超速车辆检测时,可以直接用帧间差的方法比较前后两帧图像,去除静止的区域,保留运动区域,判定视场中是否存在着汽车,判断汽车的运动轨迹及速度。但是在实际的成像过程中,场景中的诸多因素,包括照明情况、场景中物体的几体形状和物理性质(特别是表面的反射性质)、成像系统的特性以及光源、物休和成像系统之间的空间关系等,都被综合为单一图像中像素点的灰度值;由于空间的强辐射、光照的变化和传感器本身的光学特性等原因,会在每一帧图像中产生较强的干扰和噪声。因此,在进行图像检查前对图像进行基于平均法去噪的初始背景获得和基于Kalman滤波的实时背景更新等预处理;然后采用提取函数分割目标与背景。
设Ck={ck(x,y)}代表当前图像,Rk={rk(x,y)}代表参考图像,其中(x,y)为像素点的坐标,ck(x,y)≥0,rk(x,y)≤255,则提取函数Ek=(ck(x,y),rk(x,y))定义如下:

容易知道,式中0≤Ek(ck(x,y),rk(x,y)) ≤1。
用提取函数对在公路上采集到的实际运动车辆的图像做动目标检测,其实验结构如图3所示。
2.2 动目标跟踪及速度测量
在目标跟踪的同时,需要判断计算目标的运动速度,所以采用特征点匹配的方法进行动目标跟踪,以便利用特征点的视差计算车速。其要点是:在一帧图像的活动目标窗口中选择一组具有不变性质的特征点,与下一帧图像中的同类特征点作匹配,从而求得视差。这就是特征点匹配的方法。
采用Moravac算子作为点特征提取算子。它基于一个理想的特征点,在其四周所有方向上灰度具有很大的方差。
特征点提取的步骤为:首先,在5х5的窗口计算
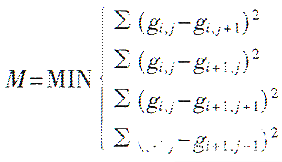
式中,i=n-2,。..,n+2;j=m-2,。..,m+2;m,n为窗口中心像元的行、列序列,gij为(i,j)处图像的灰度值。
然后,确定备选特征点,若像元的有利值M大于经验阈值,则该像元为备选特征点;否则,该像元不是特征点。
最后,用抑制局部非最大M值的方法,确定特征点。检验每个备选特征点的M值是否为一定大小(5х5,7х7,9х9)窗口内的最大值,如果在窗口内有几个备选特征点,则取M值最大的像元作为特征点,其余均去掉。
为保证匹配的正确率,采用协方差最大与差的绝对值之和最小作为双重判据,决定匹配点的取舒畅,以增强匹配结果的可靠性。
找到匹配点后,利用两者视差和事前标定过的视场内图像最小分辨率所代的最小距离以及图像采集的间隔时间,就可计算出目标速度,根据此值预测目标新位置并判断是否超速。
2.3 车牌自动定位
车牌自动定位是车牌照自动识别的第一步,正确而又可靠地检测出车牌区域是保证车牌识别率的关键。目前存在许多车牌自动定位算法,如Hough变换以检测直线来提取车牌边界区域、使用灰度分割及区域生长进行区域分割、使用纹理特征分析技术等。但实际使用时,单用一种方法难以达到实用要求。本文采用的方法是:首先用Prewitt算子提取车辆的二值边缘图像,然后用数学形态学、颜色搜索相结合的方法,进行汽车牌照定位。图4为汽车牌照定位实验结果示意图。
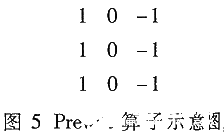
Prewitt算子定义如图5所示。由于汽车图像具体特殊的横向纹理特性,而牌照字符最具有纵向纹理特性,因此利用Prewitt边缘检测算子的方向性,通过增强图像的纵向边缘可将牌照图像与汽车背景图像分离。
对Prwitt算子检测获得的二值边缘图像进一步采用数学形态学方法中的膨胀技术生成连通区域图像。其中结构元素S的选择,对于侯选牌照区域的形成与牌照区域提取至关重要,因膨胀后得到的牌照区域极易出现与其他纹理粘连的现象,从而给进一步牌照区域提取带来困难,因此采用的结构元素S为具有水平方向膨胀能力的水平线段,膨胀后能得到多个侯选牌照区域,如图4(c)所示。
针对上述方法得到的可能为车牌的区域,通过大小、长宽比例、侯选车牌字符边缘密度等几何特征分析侯选牌照区,再充分利用车牌号码区的颜色特征,通过搜索号码区底板颜色块和号码颜色的方法,进一步从图像中删除虚假牌照区,得到可能为车牌的区域。
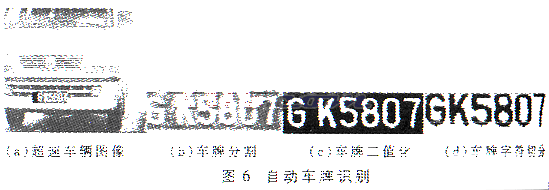
2.4 字符自动识别
针对分割完成后的牌照图像进行字符自动识别,需首先对车牌图像二值化、字符切分和规范化、字符特征提取,然后根据字符特征库,完成车牌字符自动识别。图6为字符自动识别的效果示意图。
图像二值化的方法很多,针对车牌图像,二值化的基本要求是使二值化后的图形能忠实地再现原文字。具体为:笔划中不出现空白以及二值化后的笔划基本保持原来字符的特征。二值化的关键在于阈值T的选择,采用判断分析二值化法。从图像灰度值的直方图中把灰度值的集中用阈值分为两类,然后根据两个类的类间方差和类内方差的最大来确定分割阈值。车牌图像二值化后,根据牌照中字符所占像素比便要小于背景所占像素比例,将车牌图像统一变为白底黑字。
为把字符分为单个字符,以送入识别系统识别,在字符图像二值化后,进行字符切分。利用车牌字符固定的高宽比和间距作出先验知识,在分割前先估算出字符宽度、间距,并从图像数值方向的投影直方图定出字符的开始位置,切分全部字符;然后将文字外接边框按比例线性放大或缩小为规定的32х64大小。
车牌字符识别系统的关键在于字符特征的提取,也就是如何选取既容易提取又能为识别系统提供尽可能高的模式鉴别能力、同时还要尽量少的特征维数的特征向量,它应该是最佳的样本特征属性的度量。由于车牌字符共有七个字符:第一位是汉字,通常代表车辆所属省份,或是军种、警别等有特定含义的字符简称;第二位为大写的英文字符,一个圆点间隔后的第三个字符是英文字母或是数字,其余的四位为数字。车牌字符识别与一般文字识别在于它的字符数有限,汉字共约50多个,大写英文字母26个,数字10个。为实时识别考虑,特征向量的维数可适当选择较低的维数。
系统采用投影-Fourier变换特征、网格特征和轮廓特片组成字符特征向量,与模拟中的向量进行特征匹配。特征匹配选用最小距离匹配法。经大量图像实验,有较高的识别率。
3 系统特点
高速公路视频超速监控系统用利视频图像处理技术,可对高速公路车道上的汽车进行非接触监控,获得车速、车牌号码、违章照片等运行状态信息,自动车牌识别速度快、准确率高,为实时违章处理提供了可能。该系统通用性强、开放性强、扩展性强,可应用于高速公路管理、卡口管理、巡逻执勤、逃逸车辆抓捕等场合。
责任编辑:gt
-
视频监控系统的发展及在高速公路管理中的应用2010-04-24 1908
-
视频监控在交通技术发展的应用2013-04-02 3098
-
【TL6748 DSP申请】基于DSP的雷达测速监控系统2015-09-10 3709
-
24GHz微波雷达FMCW测距系统设计概述2015-12-29 19412
-
激光雷达分类以及应用2017-09-19 8953
-
激光雷达在无人驾驶技术中的应用解析2017-10-18 4892
-
从光电技术角度解析自动驾驶激光雷达2018-09-10 6340
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 5824
-
激光雷达知多少:从技术上讲讲未来前景2020-07-14 41752
-
基于ARM核心板AM335x设计高速公路广域雷达测速解决方案2020-09-29 1740
-
如何实现激光脉冲测距雷达系统?2021-04-29 2765
-
微波雷达模组,雷达传感器技术发展,在物联网领域的智能化应用2021-08-23 1249
-
微波雷达传感器模块,智能卫生间技术应用,人体存在感应雷达2021-09-07 1510
-
TOF高速单线激光雷达相关资料分享2022-03-02 5354
-
高速公路视频超速临控系统的实现2006-03-24 1373
全部0条评论

快来发表一下你的评论吧 !
