

基于GMM和SAW谐振器复合应用实现静态和动态磁场测量系统的设计
描述
作者:郑敏,文玉梅,李平,肖庭富
1 引言
磁场测量在医学、军事、地质学等方面有广泛的应用,是现代测量领域的重要组成部分。随着材料技术的发展,磁致伸缩材料被用作磁场测量的敏感材料,成为磁传感领域的重要研究内容。B.Frank等人通过在光纤上蒸发一层磁致伸缩材料,由磁致伸缩引起光纤内光传播的光程发生变化,可以得到较高的磁场测量精度,但该结构极大地破坏了光纤干涉臂内光场偏振态的稳定性,从而使整个光纤弱磁场传感器的稳定性变差。2005年N.Yoshiza-wa等人研究了用非晶态铁磁薄带和石英/LiNbO3复合的磁传感结构,最高可达60 Hz/Oe的频率/磁场灵敏度,可用于地磁场测量。而Dong等人研究了用压电材料和磁致伸缩材料复合,利用磁电效应来测量磁场,可以达到10-9T以上的精度,但该磁电复合材料不适合测量静态的磁场。
本文将具有极高磁致伸缩效应的GMM和SAW谐振器复合,利用磁场影响GMM产生的大应力应变,作用于SAW谐振器上影响其谐振频率,从而进行磁场测量。该传感器结构简单、成本低,对磁场敏感,可用于静态和动态磁场测量。由于SAW谐振器本身可以用作无源无线传感,因此该复合传感器还可以作为无源、无线磁传感器使用。
2 复合传感结构
图1是SAW谐振器和GMM复合结构的示意图。在螺栓螺母的作用下GMM、SAW谐振器和硬质刚体材料框架紧密接触。框架同时起导轨作用,限制SAW谐振器和Terfenol-D只能在长度方向发生形变。调整螺栓的长度可调节施加在超磁致伸缩材料上的预应力,使其在磁场中获得较大的磁致伸缩。
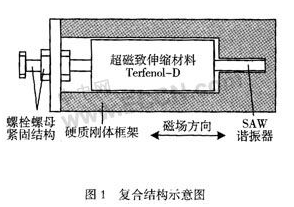
GMM选用工作在33模式下的Terfenol-D(Tb0.37Dy0.63Fe2),在沿长度方向磁场的作用下,在同方向产生伸缩。由于两端被紧固,Terfenol-D材料的应力和应变将导致SAW谐振器的谐振频率发生变化。通过检测SAW谐振器谐振频率的变化,可测得外部磁场大小。
3 理论分析
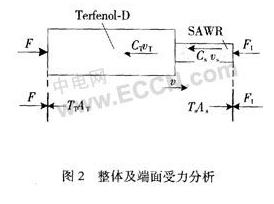
以GMM伸长时,其与SAW谐振器(SAWR)的接触面向右运动为例,得到受力分析如图2所示。F和F1是结构两端受到紧固结构和框架的反作用力;CT,vT,TT,AT分别代表GMM的力阻、振动速度、内部应力和横截面积;Cs,vs,Ts,As是SAW谐振器基片的力阻、振动速度、内部应力和横截面积;CTvT和Csvs是由于振动阻尼引起的材料内部的阻力。
对GMM和SAW谐振器,根据牛顿第三定律,分别有
对GMM和SAW谐振器整体进行受力分析,由牛顿第二定律有
式(2)中,mT和mS分别是GMM和SAW谐振器的质量,a是加速度。而GMM和SAW谐振器的应变分别为sT=u/lT,ss=u/ls,u是GMM和SAW谐振器接触面的位移。对SAW谐振器,由胡克定律有ss=Ts/Es;对GMM,由于只考虑沿长度方向发生的应力应变,故可以根据压磁方程的标量形式,有
式中,H表示磁场,ES和ET是SAW和GMM的杨氏模量,dm是GMM的动态磁致伸缩系数。由式(1)~(3)可得复合结构的振动方程为
SAW谐振器基片材料发生形变时,其谐振频率的变化量△f和应变SS的关系式为
其中,fr0为SAW谐振器自由状态谐振频率,R为材料常数。由式(4),(5)和拉氏变换可得到该磁传感器的传递函数H(s),令s=jω,代入得到该复合磁传感器的幅频特性和相频特性
采用表1中的材料和器件参数时,可得到复合磁传感器的幅频响应如图3所示。
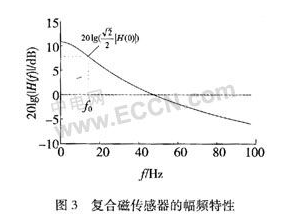
令,则f0=14.34 Hz,为该复合磁传感器的截止频率。因此该复合磁传感器为低通系统,适合于静态或低频动态磁场的测量。
当ω=0,即静态磁场时,该复合磁传感器的稳态特性为
定义a为复合磁传感器的静态灵敏度,当测量谐振频率的分辨率一定时,a值越大,该磁传感器的灵敏度和分辨率越高。由式(8)知,动态磁致伸缩系数dm越大,GMM和SAW谐振器的长度比lT/ls和截面积比AT/As越大,传感器灵敏度越高。采用表1中的数据,a的理论值为276.4 Hz/Oe。
4 实验测试
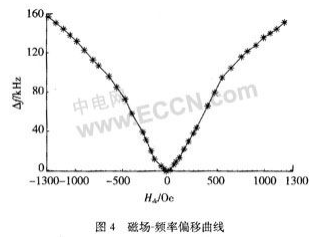
静态磁场变化范围从-1300~+1300 Oe,得到实验结果曲线如图4所示。由图4可知,频率的变化量和磁场大小近似成线性关系。取整个磁场范围区间[0,1300]Oe计算,传感器的灵敏度达到123 Hz/Oe;如取磁场范围区间[250,550]Oe进行计算,传感器的灵敏度可达190 Hz/Oe。总体地看,该灵敏度比文献中的非晶态铁磁薄带/LiNbO3结构的30 Hz/Oe和非晶态铁磁薄带/石英结构的60 Hz/Oe要高。
5 结 论
理论分析和实验测试表面,用GMM和SAW谐振器复合构成的磁传感器是一个低通系统,截止频率约为14.34 Hz;在静态磁场测量时,最高灵敏度可达190 Hz/Oe。该传感器结构简单,成本低,可用于静态和动态磁场测量。
责任编辑:gt
-
石英晶振、MEMS晶振、陶瓷谐振器、SAW谐振器是什么?有什么特点2023-12-18 2980
-
SJK晶科鑫 SAW声表面谐振器 AW433920000F9A75UB数据手册2022-08-19 491
-
陶瓷谐振器与石英晶体谐振器的区别2022-04-06 4395
-
剖析SAW谐振器谐振频率微秒级快速检测方法2021-06-18 7755
-
声表谐振器特点和用途介绍2021-02-20 5907
-
如何通过回波损耗测量来确定谐振器的Q因子2021-02-12 4645
-
利用GMM和SAW谐振器复合构建光纤弱磁场传感器的低通系统2019-08-19 4866
-
谐振器的工作原理2018-12-18 27061
-
如何处理谐振器的辐射问题2015-08-23 5435
-
音叉谐振器2010-04-19 4787
-
石英晶体谐振器2008-11-24 5772
-
晶体谐振器2006-04-16 1416
全部0条评论

快来发表一下你的评论吧 !
