

建模过程中特征点检测与匹配的知识
描述
导读
本文先从图像特征开始介绍,后分点阐述特征子和描述子的相关分类及特点,最后以图像展示了特征匹配的关系,完整的叙述了整个建模过程中特征点检测与匹配的知识。
一、图像特征介绍
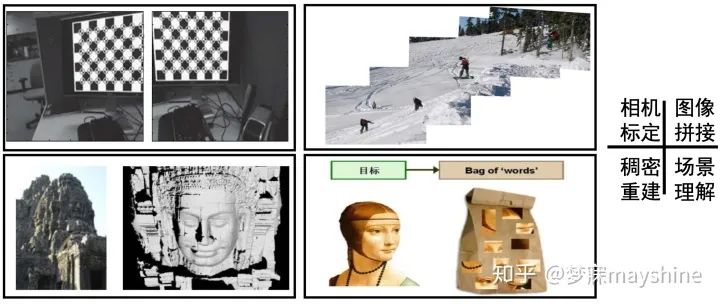
1、图像特征点的应用
相机标定:棋盘格角点阴影格式固定,不同视角检测到点可以得到匹配结果,标定相机内参
图像拼接:不同视角匹配恢复相机姿态
稠密重建:间接使用特征点作为种子点扩散匹配得到稠密点云
场景理解:词袋方法,特征点为中心生成关键词袋(关键特征)进行场景识别
2、图像特征点的检测方法
人工设计检测算法:sift、surf、orb、fast、hog
基于深度学习的方法:人脸关键点检测、3D match点云匹配
场景中的人工标记点:影视场景背景简单的标记,特殊二维码设计(快速,精度低)

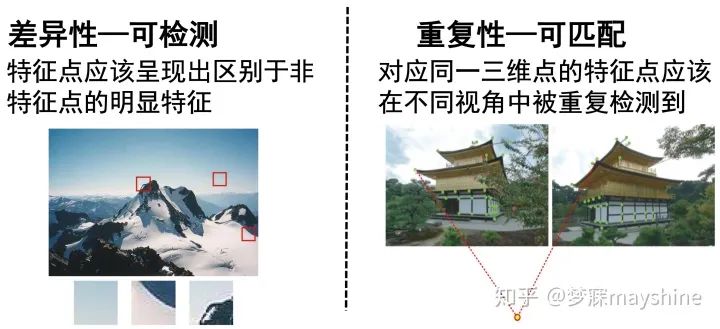
3、图像特征点的基本要求
差异性:视觉上场景上比较显著点,灰度变化明显,边缘点等
重复性:同一个特征在不同视角中重复出现,旋转、光度、尺度不变性
二、特征检测子
1、Harris 角点检测(早期,原理简单,视频跟踪,快速检测)
梦寐mayshine:角点检测(2) - harris算子 - 理论与Python代码
https://zhuanlan.zhihu.com/p/90393907
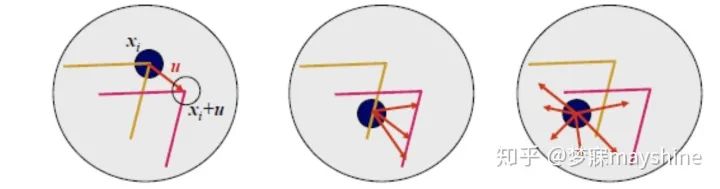
动机:特征点具有局部差异性
以每个点为中心取一个窗口,例如,5×5/7×7的像素,描述特征点周围环境
此点具有差异性->窗口往任意方向移动,则周围环境变化较大->具有局部差异性
最小二乘线性系统
加和符号:表示窗口内每个像素
w:表示权重,权值1或者以点为中心的高斯权重(离点越近权重越大)
I:表示像素,RGB/灰度
u,v:窗口移动的方向
H:harris矩阵,由两个方向上的梯度构建而成
图像梯度:
Harris矩阵:
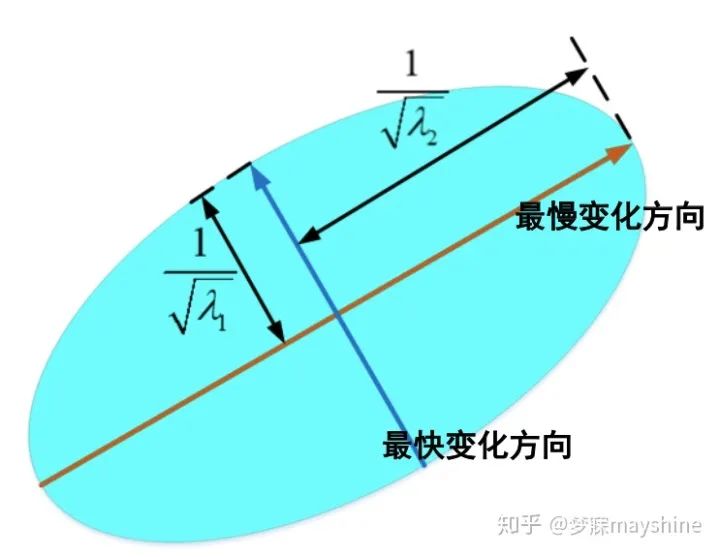
Harris矩阵H 的特征值分析
两个特征值反映相互垂直方向上的变化情况,分别代表变化最快和最慢的方向,特征值大变化快,特征值小变化慢
λ1 ≈ λ2 ≈ 0, 两个方向上变化都很小,兴趣点位于光滑区域
λ1 > 0 , λ2 ≈ 0 ,一个方向变化快,一个方向变化慢,兴趣点位于边缘区域
λ1 , λ2 > 0 , 两个方向变化都很快,兴趣点位于角点区域(容易判断)
Harris角点准则代替矩阵分解:
反映特征值情况,trace为迹
k的值越小,检测子越敏感
只有当λ1和λ2同时取得最大值时,C才能取得较大值
避免了特征值分解,提高检测计算效率
非极大值抑制(Non-maximal Suppression) 选取局部响应最大值,避免重复的检测
算法流程:
0)滤波、平滑,避免出现阶跃函数
1)计算图像水平和垂直方向的梯度
2)计算每个像素位置的Harris矩阵
3)计算每个像素位置的Harris角点响应值
3+)非极大值抑制
4)找到Harris角点响应值大于给定阈值且局部最大的位置作为特征点
检测结果:
2、基于LoG的多尺度特征检测子
动机:Harris角点检测不具有尺度不变性,让特征点具有尺度不变性
解决方法:尺度归一化LoG算子,处理尺度的变化
LoG算子:Lindeberg(1993)提出Laplacian of Gaussian (LoG)函数的极值点对应着特征点
尺度空间: 一副图像使用不同大小滤波核滤波(e.g.高斯滤波),越大的滤波核越模糊,分辨率越小,不同滤波核滤波后的空间为尺度空间=3维空间(图像+尺度),模拟人类视觉,较远物体模糊,一系列滤波核构成的不同分辨率图像为尺度空间->LoG能够处理不同尺度的图像
LoG算子[1]形式:高斯滤波性质:卷积->求拉普拉斯算子==求拉普拉斯算子->卷积 其中 是LoG算子
尺度归一化LoG[2](使得具有可比性=汇率):其中 是尺度归一化LoG算子
不同尺度下的LoG响应值不具有可比性
构建尺度空间,同时在位置空间和 尺度空间寻找归一化LoG极值(极大 /极小)点作为特征点
不同尺度下 的响应值
LoG特征检测算法流程
1)计算不同尺度上的尺度归一化LoG函数值
2)同时在位置和尺度构成的三维空间上寻找 尺度归一化LoG的极值点
3)进行非极大值抑制,减少重复检测 (去除冗余、保持稳定性)
检测结果:效果好,LoG计算量大
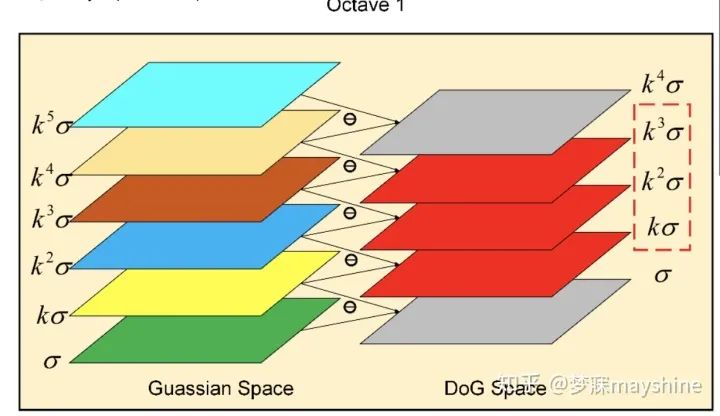
3、基于DoG的多尺度特征检测子(SIFT)——稳定和鲁棒
LoG可以由DoG近似:Lowe(2004)提出归一化LoG近似等价于相邻尺度的高斯差分(DoG)
高斯空间:
高斯差分DoG:相邻的空间做差,极点处对应特征点
尺度空间的构建
阶数:O=3 (octave=阶,每阶图像尺寸减少一半,阶数高->运算量大->尺度变化大)
每阶有效差分数:S=3(每个阶内划分数)
每阶层数:N=S+3
高斯空间
高斯差分
有效差分 (尺度空间有上下两个邻域才行,边界无效)
任意设置
特征点位置的确定:
1)尺度空间和图像空间上:3*3窗口,26个邻域,找极值点比其他都要大DoG,LoG找极大值或极小值
2)横轴向代表离散位置,纵轴代表DoG响应值,在极值点邻域内求二阶函数的极值=准确像素位置
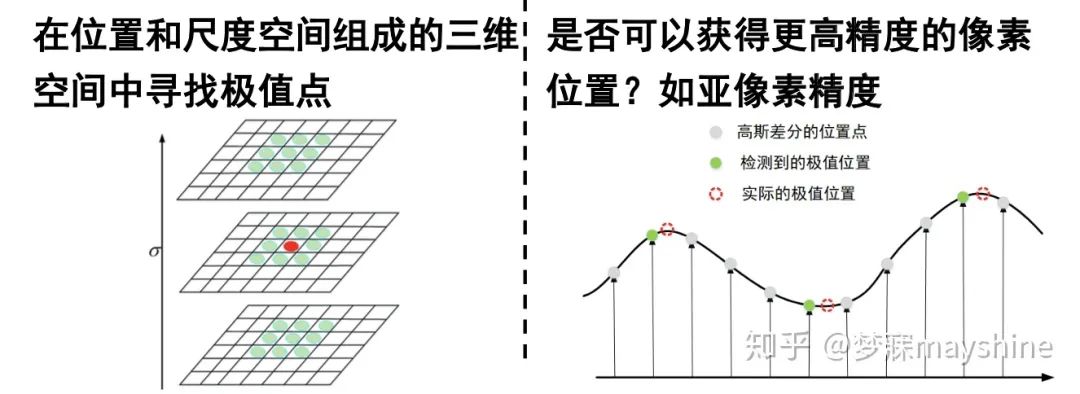
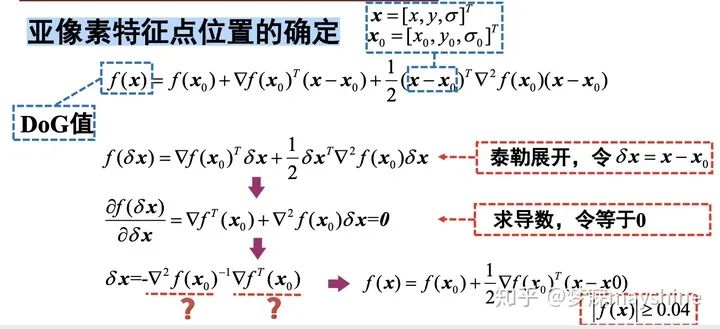
亚像素特征点位置的确定
x: 为三维,坐标空间+尺度空间
f(x): 为DoG值
x0: 检测到离散坐标下的极大值点
任务:在x0附近近似一个二阶函数,求二阶函数极值得到更准确的亚像素极值位置
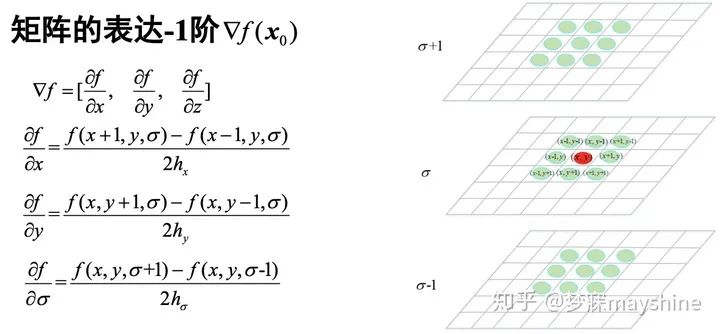
矩阵的表达-1阶
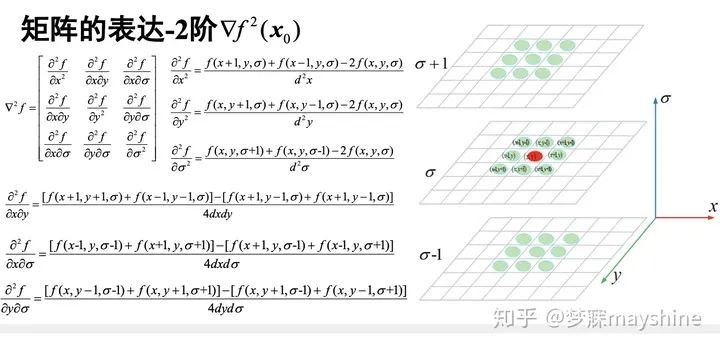
矩阵的表达-2阶
极值点有可能是边缘点,->除去边缘点:DoG在边缘处值较大,需要避免检测到边缘点
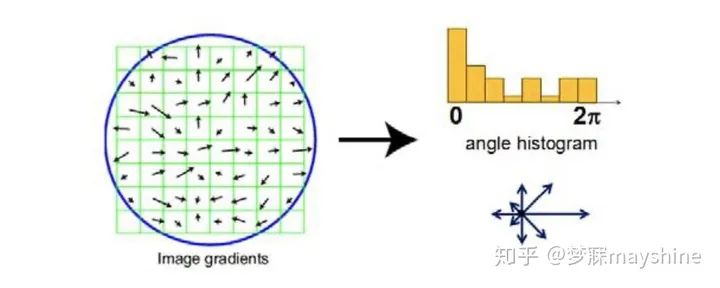
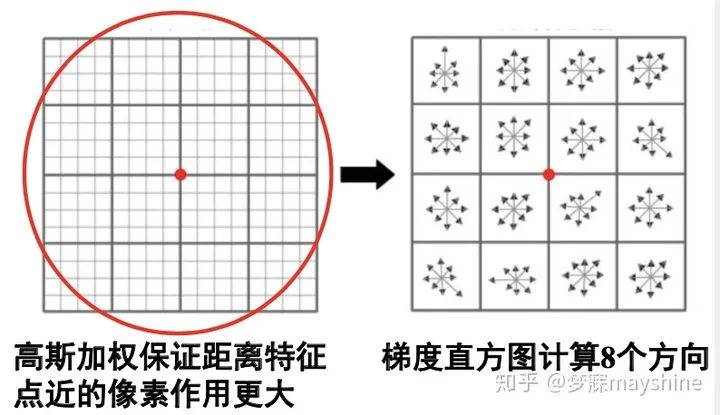
计算主方向:通过统计梯度直方图的方法确定主方向,使算法具有旋转不变性
SIFT特征检测流程:旋转不变性、尺度不变性、亮度 变化不变性,对视角变化、仿射变换有一定程度的稳定性
1)计算图像尺度空间:
2)DoG极值点检测与定位:保留 的特征点
3)边缘点去除:
4)计算主方向
5)生成描述子
6)检测结果
4、快速特征点检测方法:——实时性要求高
FAST特征点[3]:Feature from Accelerated Segment Test
1)以候选点p为圆心构建一个离散圆
2)比较圆周上的像素与p点像素值
3)当有连续的n个像素值明显亮于或者暗于p时,p被检测为特征点,例Fast9,Fast12
特性:通过检测局部像素灰度变化来确认特征点的位置,速度快,SIFT的100倍;不具有尺度和旋转不变性
流程:
检测:
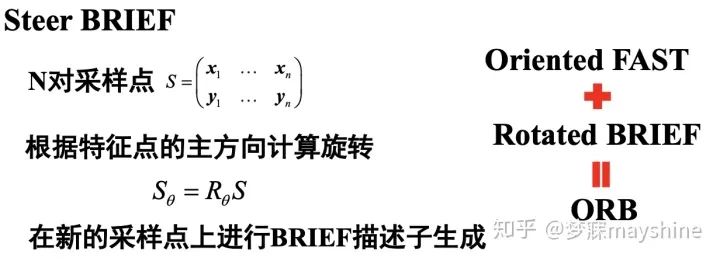
Oriented FAST (ORB)
获取尺度不变性:构建图像金字塔,在金字塔 每一层上检测关键点
获取旋转不变性 :通过灰度质心法(Intensity Centroid) 确定图像主方向
图像块B上的矩定义为:
图像块B的质心定义为 :
计算方向角 :
检测结果:
三、特征描述子
特征描述子 Feature Descriptor
每个特征点独特的身份认证
同一空间点在不同视角的特征点具有高度相似的描述子
不同特征点的的描述子差异性尽量大
通常描述子是一个具有固定长度的向量
特征支持区域
主方向:进行旋转并重新插值
特征尺度:影响支持区域的大小
1、基于直方图的描述子
(1)用于微小运动的描述子 [4](e.g.相邻两帧视频)
定义:以特征点为中心的矩形区域内所有像素的灰度值作为描述子
特性:适用于微小变化的图像对 图像存在明显的旋转、尺度、光照和透视变换时不稳定
(2)Sift描述子——旋转主方向
定义:根据主方向对支持区域进行旋转,并通过双线性插值重构
特性:图像归一化处理,去除光照变化
统计局部梯度信息流程:
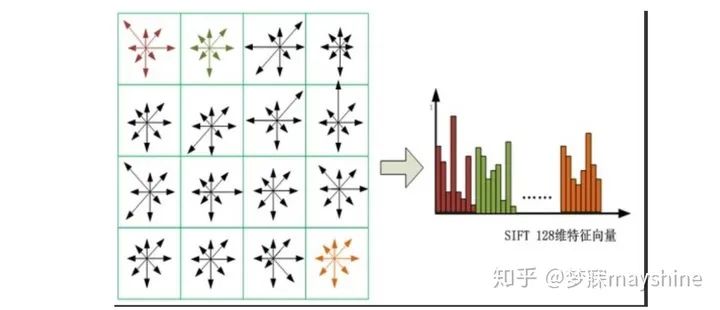
1)将区域划分成4x4的block ;
2)每个block内统计梯度方向 的直方图(高斯加权梯度作为系数)
(2)Sift描述子——生成描述子
(2)Sift描述子——归一化处理
处理方式
1)门限处理-直方图每个方向的梯度幅值不超过0.2
2)描述子长度归一化
特性:归一化处理提升了特征点光度变化的不变性
SIFT描述子变种:PCA-SIFT/SURF
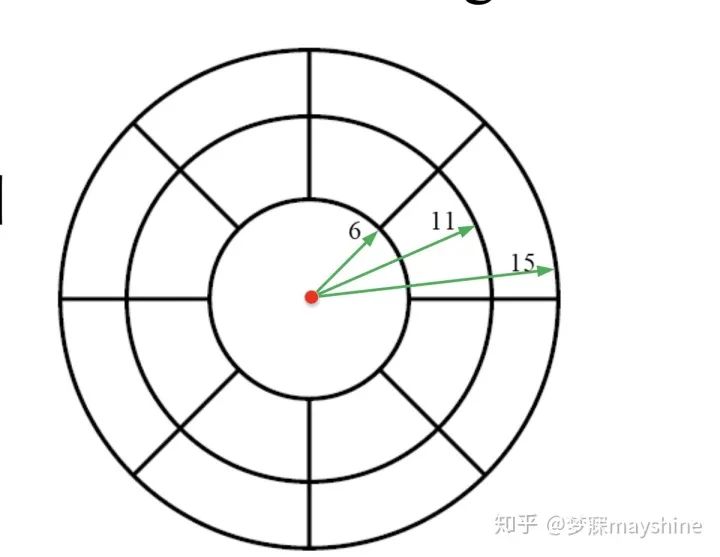
(3)GLOH描述子[5]:Gradient Location-orientation Histogram
一共有1+2x8=17 个blocks
每个blocks计算16个方向的直方图
描述子共16x17=272维
通过PCA可以降维到128
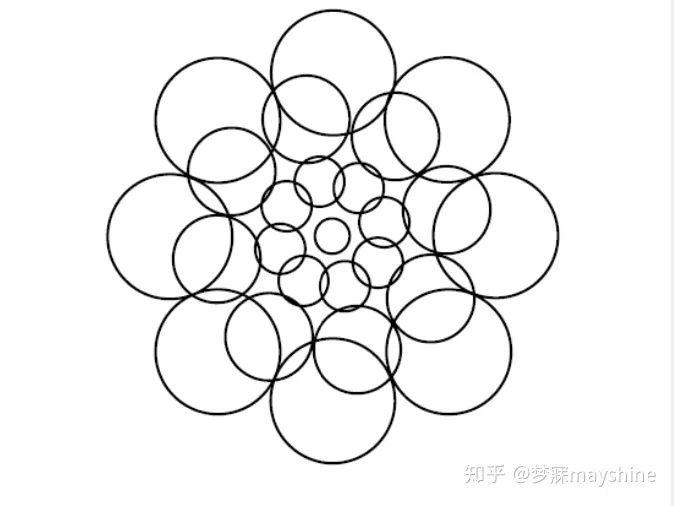
(4)DAISY描述子[6]:每个圆的半径对应高斯的尺度
2、基于不变性的描述子
3、二进制描述子——BRIEF
描述子形式:描述向量由N个0或者1组成 N=128,256,512
描述子特性:生成速度快(汉明距离),匹配效率高 ,简单有效;不具有旋转不变性
描述子流程:
1)图像进行如高斯滤波预处理——去除噪声
2)在支持区域内随机采样N对大小5×5的patch
3)比较patch内像素和的大小,并保留结果构成特征向量 $ au(p;x,y)=left{ egin{aligned} 1, ifp(x)
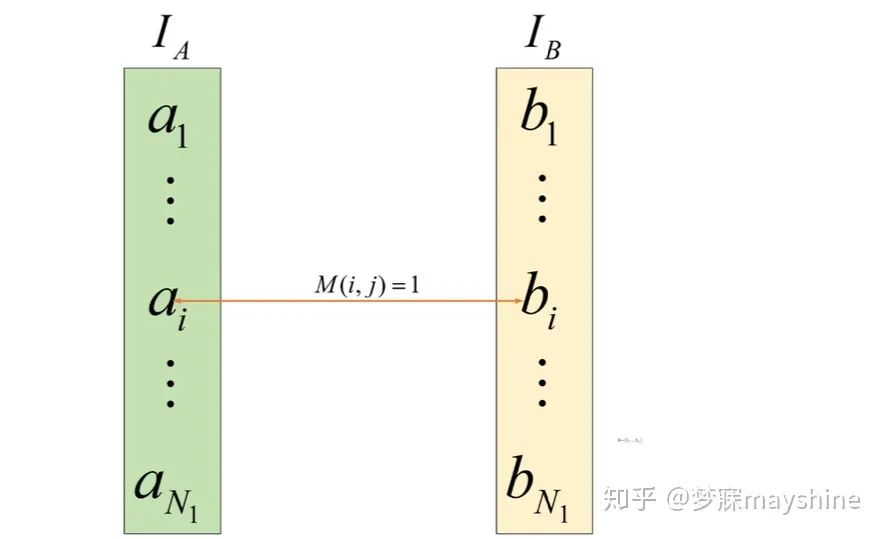
四、特征匹配
计算两幅图像中特征描述子的匹配关系
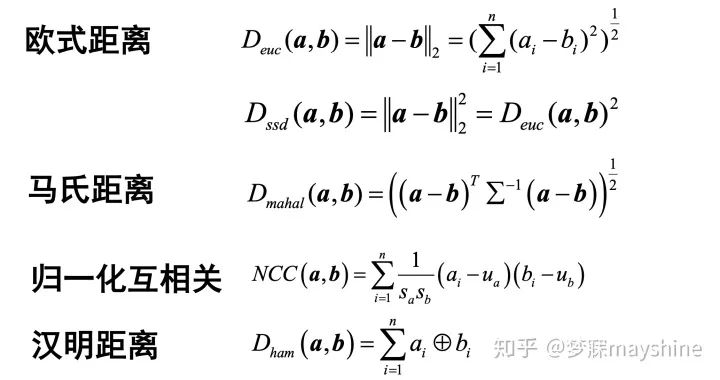
1、距离度量
归一化互相关,1 ->非常匹配,0->不匹配
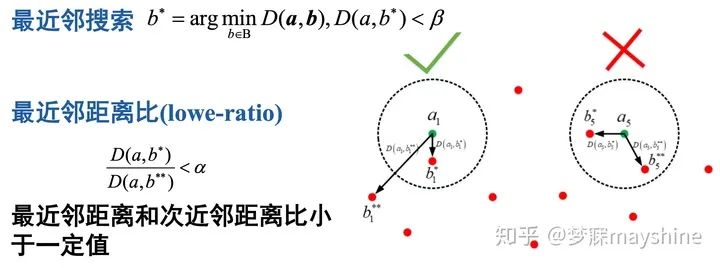
2、匹配策略
最近邻:加了距离约束,防止孤立点
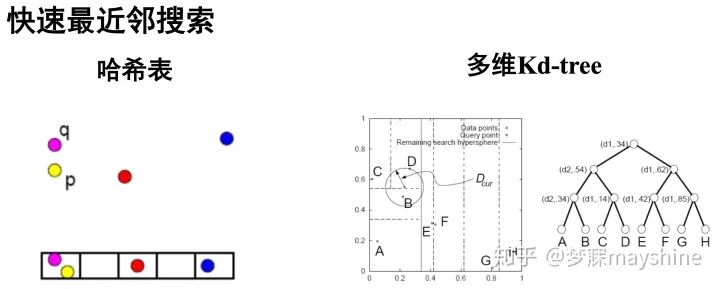
3、高效匹配
4、特征匹配验证
责任编辑:lq
-
机器视觉图像处理之角点检测技术2016-01-22 4440
-
【DragonBoard 410c试用体验】 之OpenCV中之图像角点检测实现2016-09-13 12823
-
特征点(角)检测与匹配2020-05-06 1689
-
一种基于轮廓分析的图像特征点检测方法2009-12-14 941
-
基于改进局部不变特征的兴趣点匹配2010-02-10 575
-
免费下载!一款基于Zynq的Harris角点检测算法实现Demo2017-02-08 739
-
基于区域检测特征匹配方法设计研究2017-10-28 1149
-
FAST特征点检测features2D2017-11-29 3927
-
基于特征匹配的IP软核硬件木马检测2018-02-23 1161
-
firefly人体特征点检测介绍2019-11-05 2588
-
基于Laplace-Beltrami算子的特征点检测算法2021-04-21 1348
-
基于高斯金字塔图像的改进Harris特征点检测算法2021-05-06 1274
-
基于计算机视觉领域中的特征检测和匹配研究2023-06-16 6134
-
将高级语义信息隐式地嵌入到检测和描述过程中来提取全局可靠的特征2023-06-30 1759
-
DCNN网络结构 DCNN的人脸特征点检测2023-07-20 761
全部0条评论

快来发表一下你的评论吧 !
