

如何通过激光扫描系统对扫描后的点云进行噪音净化并重建?
描述
线激光扫描的原理就是激光三角测距的原理,通过图像校准得到高度数值。
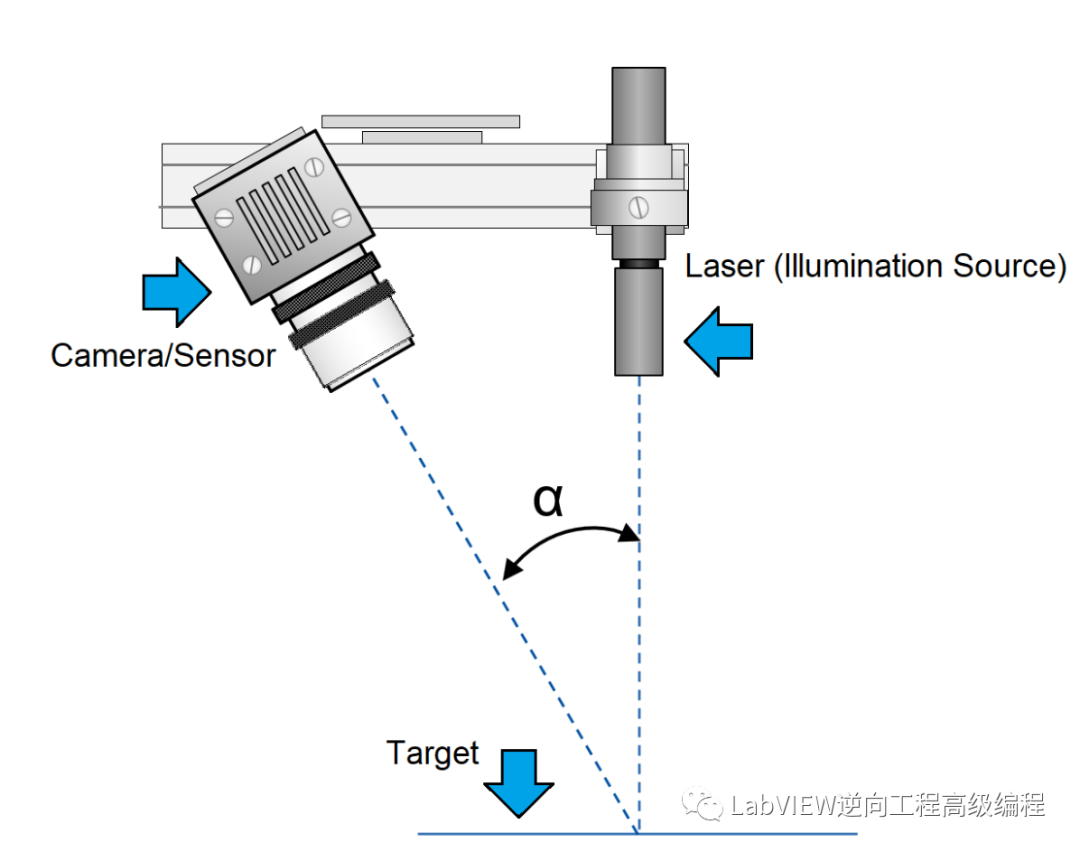
要求精度不高(》0.1mm)的场景我们完全可以按照原理自己搭建硬件结构,扫描范围完全可以根据我们自己需求通过调整相机与激光之间的距离来进行调整,线激光的波段也可以根据扫描材料的不同来调整线激光的波段,搭建完成后通过相机校准,完成整个系统的标定。这套系统的精度取决于4个方面,1是相机的分辨率,2是线激光的线宽、光的均匀度,3是相机与激光的校准精度,4图像中激光条纹能量重心提取精度。这几个方面是制约这套系统精度的关键。
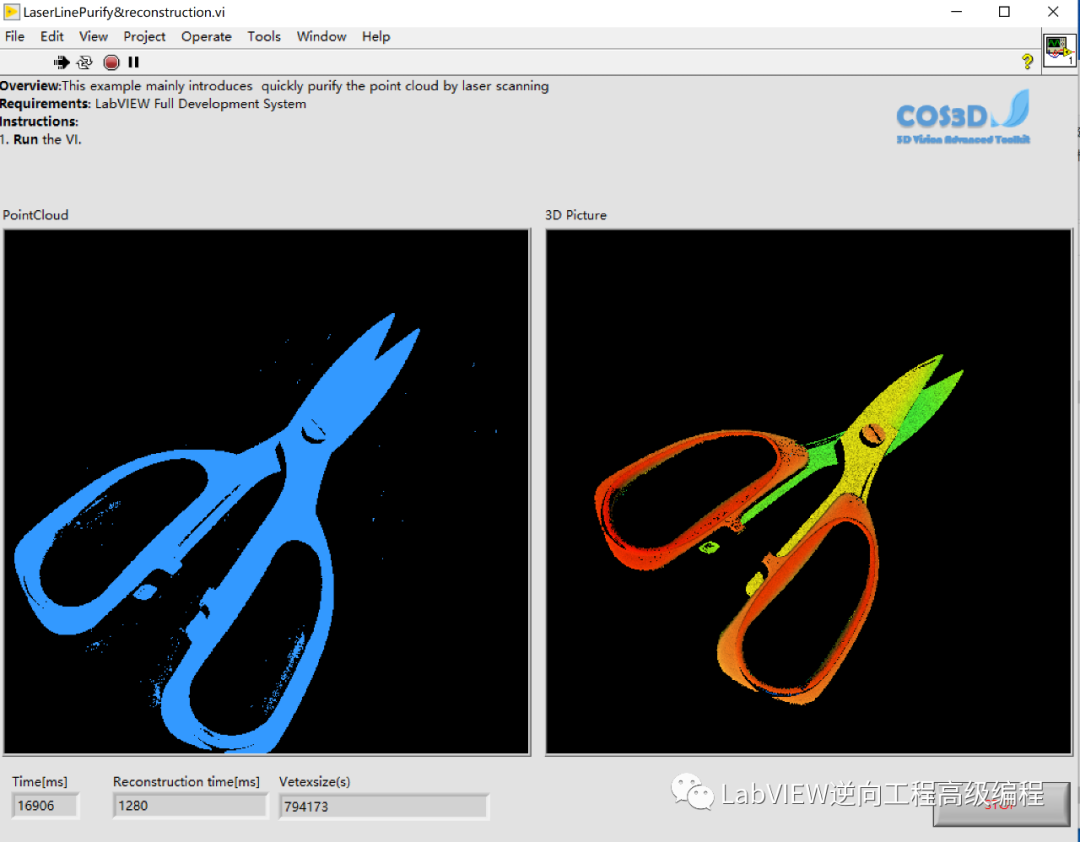
在扫描过程中由于物体表面反射及周围光线的干扰,导致扫描完成后会有噪音的出现,这将影响三角网格重建质量、点云配准效果等后续计算。
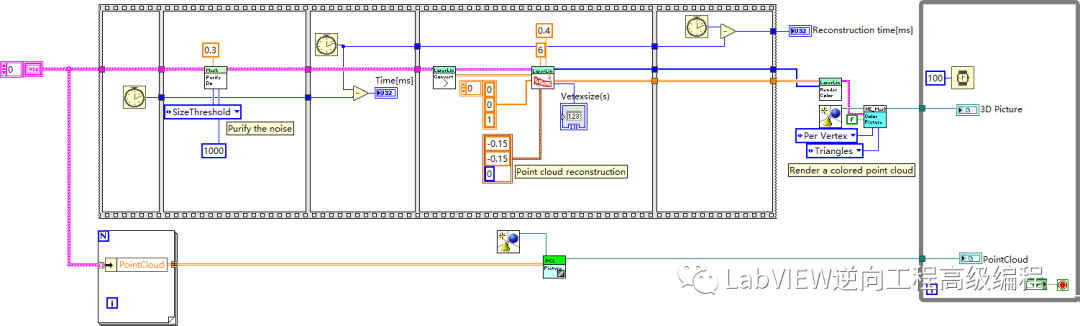
3D Vsion Advanced Toolkit For LabVIEW工具包专门针对线激光扫描封装了一套高效的运算库,其中就包含点云快速净化。
作者通过自己搭建的激光扫描系统(标定精度0.008mm),扫描了一把剪刀,对扫描后的点云进行噪音净化并重建,如下图所示:
原文标题:线激光扫描点云快速净化与重建
文章出处:【微信公众号:LabVIEW逆向工程高级编程】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 激光
-
激光振镜扫描锡机的优势2025-08-11 1227
-
深度解析激光扫描共聚焦显微镜:揭示材料表面粗糙度的新视角2024-04-16 1042
-
三维场景点云理解与重建技术2023-08-08 2840
-
其域创新手持激光雷达/手持SLAM其域灵光Lixel重建深圳规划馆2022-12-29 1245
-
徕卡BLK360迷你激光扫描仪2021-11-11 2124
-
三维激光扫描技术与楼宇自控系统2021-09-27 4124
-
大坝桥梁水利工程项目水利坝体结构3d扫描仪三维扫描服务在施工2020-04-21 1431
-
大坝桥梁水利工程项目水利坝体结构3d激光扫描仪三维扫描服务2020-04-13 1221
-
3D激光扫描仪整个采矿系统进行全面激光扫描调查2020-04-10 1352
-
三维激光扫描仪水平测角精度检测及改正2018-02-27 1981
-
基于单景扫描点云数据网模型设计2017-12-20 792
-
基于激光扫描仪的树干三维重建方法研究2010-01-22 1263
全部0条评论

快来发表一下你的评论吧 !
