

基于DSP芯片tms320lf2810实现永磁同步电动机反推控制的应用方案
描述
作者:刘栋良;严伟灿;刘栋良
随着永磁磁性材料、半导体功率器件和控制理论的发展,永磁同步电动机(pmsm)在当前的中、小功率运动控制中起着越来越重要的作用。它具有如下的优点:结构紧凑、高功率密度、高气隙磁通和高转矩惯性比等。因此,在伺服系统中越来越被广泛应用。另外,永磁同步电动机是一个非线性系统,它含有角速度ω与电流 id或iq的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。对于高精度速度跟踪控制问题,载扰动会对速度波动产生影响。因此,需要对负载扰动进行估计,来减小它的影响。
因此一般的线性控制方法效果不够理想。为了解决其控制问题,当前采用的非线性控制方法主要有变结构控制、反馈线性化和无源控制等,但这些非线性控制的设计方法比较复杂,不易理解。本文结合矢量控制的坐标变换方法,提出了backstepping控制策略,它不但能够实现永磁同步电动机系统的完全解耦,设计方法比较简单,而且控制效果比传统的pid控制更具有明显的优越性。另外,通过设计负载转矩扰动观测器来降低负载扰动对速度波动的影响。
永磁同步电动机的反推控制
数学模型
采用表面式的永磁同步电动机,其基于同步旋转转子坐标的d-q模型[1]如下:
其中:ud, uq是d,q轴定子电压;id,iq是d,q轴定子电流;r是定子电阻;l是定子电感;tl是恒定负载转矩;j是转动惯量;b是粘滞磨擦系统;p是极对数;ω是转子机械角速度;φf是永磁磁通。
backstepping控制实现
backstepping 作为一种有效的非线性控制设计方法,它是基于李亚普诺夫函数设计的控制,因此设计的控制器能够保证系统的全局渐近稳定,并且可以达到电流跟踪的效果,使得系统具有快速的响应速度[2]。
根据backstepping设计步骤[3,4],可以设计实际的控制ud,、uq为:
负载扰动观测器设计
在一些高精度伺服系统中,负载扰动会产生变化,使速度产生波动,从而导致系统伺服性能的下降。因此,在高精度速度跟踪控制中,需要对负载扰动进行估计,实时加以在线补偿。
由于负载扰动不易直接测量,这里可以通过已获得的iq、ω加以观测。考虑到iq、ω的测量会产生噪声误差,故在tl观测器的输出端附加一滤波器  ,以消除上述的影响。对式(6)取拉斯变换得:
,以消除上述的影响。对式(6)取拉斯变换得:

则所设计的负载扰动观测器如图1所示。

图1 负载扰动观测器
系统实例仿真

图2 系统控制框图
基于转矩扰动估计的永磁同步电动机反推控制框图,如图2所示。通过调整参数 使系统达到满意的配置点。永磁同步电机参数如附表所示。
附表 永磁同步电动机参数

假定速度的参考速度为500r/min,在0.2s突加负载20nm,反推控制参数:
k1=50000,k2=300,k3=20,
t0=0.01
仿真如图3所示。对图3中的圆局部放大,如图4所示。图4中的曲线1为反推控制下的速度跟踪曲线,曲线2为引入转矩扰动估计的反推速度跟踪曲线。由仿真结果可以看出,反推控制能够使的系统达到快速的速度跟踪,同时保证系统具有良好的动态性能。同时,引入转矩扰动估计的反推控制更能加快了系统的跟踪速度,减小扰动对速度波动的影响。

图3 速度跟踪曲线
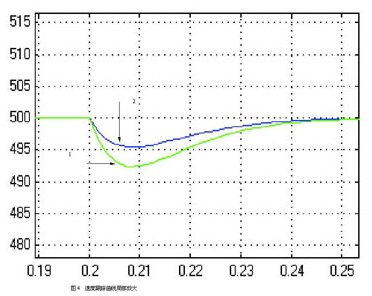
图4 速度跟踪曲线
结论及实现

图5 主程序
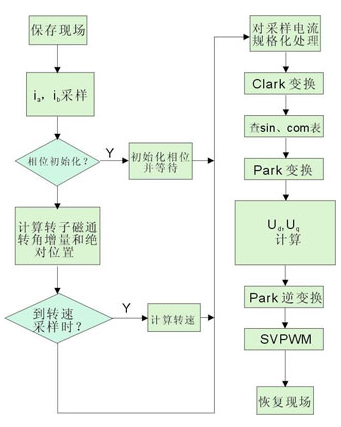
图6 定时器中断子程序
为了实现基于负载扰动估计的反推控制方法,特选用电机控制专用dsp芯片tms320lf2810作为数字控制器,并编制相应的软件来实现。如图5所示,图6为定时中断子程序来实现反推控制策略并产生svpwm。本文把基于转矩扰动估计的反推控制应用于永磁同步电动机的速度跟踪中,该设计方法减少了调节参数,简化了系统的控制设计。通过matlab仿真,表明系统有很好的跟踪性能,验证了系统设计的有效性和可行性。另外,此控制策略已应用于浙江省计划重点项目:“全数字交流通用伺服驱动系统”中,它表明,调节参数比pid相对减少,参数整定比较容易,减轻了编程工作,系统取得了良好的效果。
责任编辑:gt
-
永磁同步电动机的工作原理 永磁同步电动机的控制方法2024-02-02 3415
-
永磁同步电动机的工作原理 永磁同步电动机的优点有2024-01-19 2314
-
永磁同步电动机与直流无刷电动机有何异同2023-12-20 5530
-
永磁同步电动机如何实现自由停车?2023-11-14 1985
-
自控式同步电动机2021-08-27 2088
-
一文解析永磁同步电动机的原理与结构2021-01-27 4502
-
永磁同步电动机的发展趋势如何?2019-10-10 2796
-
一文阐述永磁同步电动机的综合效益2018-10-17 2571
-
基于TMS320LF2407A的永磁同步电动机伺服系统的研究2016-05-04 918
-
永磁同步电动机的分类和特点2014-01-22 20716
-
永磁同步电动机原理2011-12-12 4857
-
基于矢量控制的永磁同步电动机回馈制动仿真2011-08-15 1662
-
基于DSP的永磁同步电动机伺服系统的设计2009-09-01 533
-
低速永磁同步电动机的设计研究2009-06-08 821
全部0条评论

快来发表一下你的评论吧 !
