

基于AT89C51单片机和地感线圈实现动态车辆检测器的设计
描述
1 引言
随着经济的发展,不停车收费系统(ETC)已在我国悄然兴起。不停车收费系统主要是由通讯、监控、收费三大系统组成。整个系统可靠运行的一个重要环节就是车辆检测器。在不停车收费系统中它是检测驶向通讯区域的车辆并命令天线进行通信的传感器,具有进入检测、车速检测、车型判别等功能;它是检测出离开通信区域的车辆、根据ETC车道控制器的判断控制栏杆、路侧显示器的传感器,具有进入检测功能;它具有检测车辆通过,控制清除针对该车辆的路侧显示器的显示内容以及控制针对后续车辆的显示的功能,并命令栏杆关闭的功能。
考虑到性能、价格、技术复杂性、可靠性、维护要求、适用范围等因素,我们这种车辆检测器是基于地感线圈原理研制的。
2 动态车辆检测器设计
2.1 系统组成
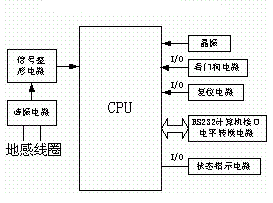
图1 动态车辆检测器系统框图
图1为动态车辆检测器系统框图。地感线圈通过馈线与谐振电路相连,当铁磁性的车体通过地感线圈时,通过谐振电路将电感量的变化转换成频率的变化。单片机是整个系统的核心,通过单片机计数器进行计数,不断读出数据即出当前频率,获得频率变化趋势,并根据当前的各种参数要求与基准频率比较从而判断是否有车到来,最后输出不同的状态信号供外部设备使用。同时上位机通过串口RS232采集到频率变化值形成感应频率曲线用于车型判别。
为了确保设备在公路现场恶劣的噪声干扰环境下,能够长期正常可靠地工作,专门设计了硬件看门狗电路,使其保证设备在死机后迅速自启动恢复工作。同时在检测器长期运行过程中,如果工作频率超出了一定的范围则通过复位电路进行复位,以重新进行频率调整。状态指示电路用于指示车辆检测信息,装置运行与网络通讯信息,检测器工作状态信息等。
2.2 动态车辆检测电路
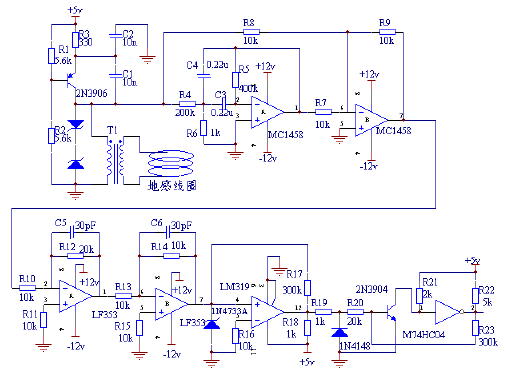
图2 动态车辆检测电路原理图
图2给出了动态车辆检测电路原理图。整个电路是由谐振电路、由用带通和相加器组成的带阻滤波器、同相直流放大器、迟滞比较电路和波形整形电路组成。基准频率的获取直接影响测量精度,如果谐振电路的振荡频率较低,当有不同类型车辆经过地感线圈时,谐振电路输出信号的波形形状变化不大,只存在由于车辆底盘离地面高低不同而引起的微弱变化。这样则大大减小了测量精度,使得判断车辆通过的结果误差很大。本 图2动态车辆检测电路原理图设计采用电容反馈三点式振荡电路,将电路的起始基准频率设计在100KHz左右,工作频率在100KHz—160KHz 之间都很稳定,完全可以满足交通部规定线圈的适用范围(10Uh—2200Uh)。
3 系统软件设计
本系统采用AT89C51单片机,片内有4KBYTE的EPROM可以反复编程,并且操作简单,便于开发调试和批量生产。我们选用11.0592MHz的晶振。
3.1 当前频率获取
在主程序中设置一个定时器,定时周期为8ms,定时时间到触发定时中断Timer1Int,在中断服务程序中,不断读取当前振荡计数值,并保存到Counter的自变量中。
3.2 基准频率校订
基准频率的获取比较复杂。由于环境因素的影响,外界的各种干扰会导致同一线圈的基准频率发生变化,使得线圈的基准频率值不固定,是一个时变参数。基准频率主要向两个方向变化:一方面因外界条件变化而导致线圈电感量增大,使得实际基准频率变小,此时当前频率也相应的变小。在这种情况下,当前频率在缓慢地变小,而基准频率如果保持不变,这样两个值的差会小于设定的阈值,检测不到车辆的到来。
另一方面,由于外界条件的变化而导致线圈电感量减少,从而引起频率的增加,而有车通过的时候也会引起频率的增加,这两种情况相似,如果不采取措施将会产生车没来而判断到车来的情况导致检测器误检。因此在系统运行的过程中我们必须不断的校订基准频率。基准频率校订算法流程图如图三所示。该算法根据有车到来时频率向两个方向变化分别进行校订。
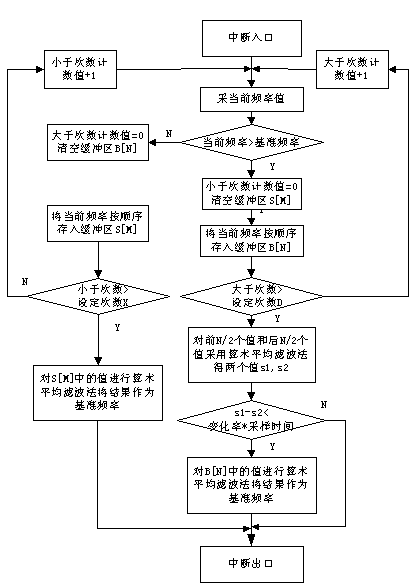
图3 基准频率校订算法流程图
3.3 车型识别:
在不停车收费系统中,我们用自动收费系统代替传统的人工半自动收费系统。自动收费系统将需要许多高新技术,其中一个最为关键的技术是如何测出实际的车辆类型以确定收费标准。我们选用地感线圈作为传感器,结合模糊模式识别算法对车辆进行分类。
4 结束语
本系统采用了多种软硬件抗干扰措施,并能够对基准频率进行实时校订,使系统具有实时性强、性能稳定、检测率高等特点,基本上满足了ETC系统的各种要求。另外采用模糊模式识别方法,更好的利用人的识别经验,把人的经验归纳成推理规则,用推理代替计算来完成识别的过程。模糊模式识别方法的使用充分发挥了地感线圈在分类系统中低成本、高可靠度、简单方便等独特的优势。通过改变阈值等各种参数还可以将其应用在停车场等不同场合。
责任编辑:gt
-
AT89C51 单片机中文资料2025-06-24 885
-
基于AT89C51单片机的点击转速测量2023-10-20 673
-
基于AT89C51单片机用8255实现接口扩展Proteus仿真及程序2023-05-05 993
-
基于AT89C51单片机MAX7221控制数码管动态显示Proteus仿真2023-05-04 864
-
AT89C51单片机2021-11-12 2972
-
基于AT89C51单片机的温度检测系统硬件电路设计2019-09-19 14314
-
基于AT89C51单片机的电子表设计2017-06-21 2105
-
用AT89C51单片机实现频率测量2016-05-06 741
-
用单片机AT89C51设计的数字钟2012-04-13 10399
-
AT89C51单片机简介2009-11-12 20790
-
智能环形线圈车辆检测器的设计与实现2009-08-14 1480
-
如何实现(电脑)PC机与单片机AT89C51的串行通信2009-04-07 4998
全部0条评论

快来发表一下你的评论吧 !
