

基于Linux平台和嵌入式控制计算机实现排爆机器人控制系统的设计
描述
作者:王春宝;蒋梁中;林焯华;李朝清
排爆机器人属于搬运机器人的一种类型,很多搬运机器人是模仿人类的动作,用来帮助或部分代替人来进行繁重、危险、重复等工作。排爆机器人模仿人类的行走、抓取物体的动作,可以被用来排除现场的爆炸物。排爆机器人机械部分包含行走小车和机械手臂。
1 排爆机器人控制系统结构
排爆机器人控制系统不再采用原来机器人所采用的PLC控制方式,而是基于嵌入式工控机的基础上,采用基于Linux平台的开放式构件库,运算速度极快,可以达到微秒级。排爆机器人控制系统由三部分组成,即传感器部分、机器人本体、操作控制台组成。传感器部分包含宽接入、多信息融合器。宽接入、多信息融合基于ARM9系统,由12位精度以上A/D、32路I/O、RS232通讯接口组成,能融合多种传感器信号;机器人本体包含嵌入式控制计算机和各关节伺服电机,能驱动各轴(带补偿),分配各轴运动,处理和控制各种状态量;操作控制台部分包含主控PC机、指令解码器、图像解码器、无线接收发射器等。CCD摄像机和超声波传感器所获得的图像信息、障碍物信息,经无线传输至主控PC机。主控PC机使用图像识别和分析技术获得对象物体的形状和位置信息,同时将目标物、障碍物等三维图像信息显示在计算机屏幕上。在人工指明目标物后,主控PC机经人工智能(模式识别、路径规划、轨迹避碰等)计算;将控制指令通过无线传输给机器人本体嵌入式控制计算机,自动控制机器人运动。基本结构如图1所示:
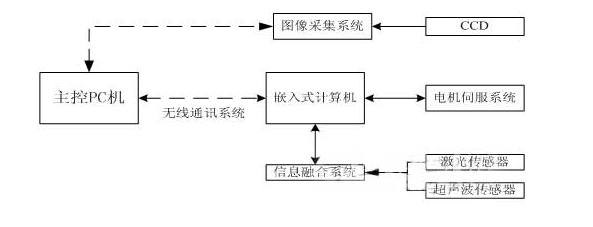
图1排爆机器人控制系统基本结构
2 小车的行走控制
人工通过控制杆(或按钮),在小车引导图像(可视信号)的指示下,完成前进、后退、左转、右转和原地旋转的功能直至达到机械手的手爪能抓取可疑爆炸物的位置为止。机器人的平衡是利用整机的动力学算法求得,将求得多种数据去控制机器人手臂的空间姿态从而达到整机平衡而不至于倒覆。例如当小车在斜坡作上升运动时,机器人手臂往前靠以保持整机的平衡。小车在运动过程中需要避开可能遇到的障碍物。通过环境传感器如CCD摄像、超声波传感器等取得障碍物大小及环境信息,实现小车避障,即所谓的路径规划(如图2所示)
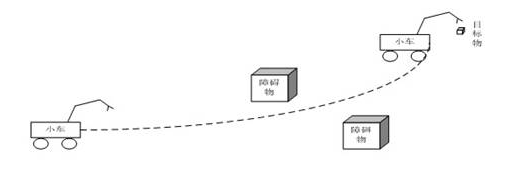
图2 排爆机器人路径规划示意图
3 机械手的运动控制
机械手的运动控制(如图3)是多级控制系统:位于最上层的AI级是人工智能层。它是利用CCD摄像机和超声波等传感器获得障碍物轮廓与距离以避开障碍物实现避碰,这就是“轨迹规划”(如图4)。
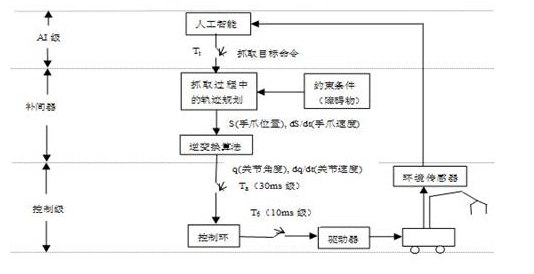
图3 机械手多级运动控制系统
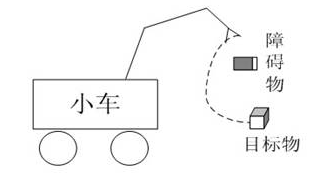
图4 机械手轨迹规划示意图
位于中间层的控制是机械手抓取运动控制中最关键的部分。它实际上是一个补间器。机械手的运动控制可分为姿态控制与手位置控制。腰、大臂、小臂、手爪的控制,是由主控计算机通过机械手运动学位移问题进行反向运动求解,得出腰、大臂、小臂、手爪的位置,然后给出各关节位置指令传至上述关节的嵌入式系统控制计算机,完成带有速度反馈环的位置控制。四个关节的运动速度通过机械手的轨迹规划来决定,从而避免机械手的蛇形运动。由于有触觉传感器,手爪可以自动控制,也可以是在图像信号的指引下作精细“柔软控制”。抓取可疑爆炸物时,控制手爪夹持力约大于可疑爆炸物脱落重力,不至用力过大而夹坏可疑爆炸物,从而完成专家指定的动作。
位于最下层是控制级位置控制器与速度调节器均采用成熟的PID(包括P、PI、PD)控制。当PID控制其选择合适的参数时,具有一定鲁棒性,简单、实用。当PID无法实现有效控制时,可改进之或结合其它方法,如前馈控制。运动控制包括机械手各个关节运动控制和行走运动,初步统计控制回路有13路,如图 5所示。
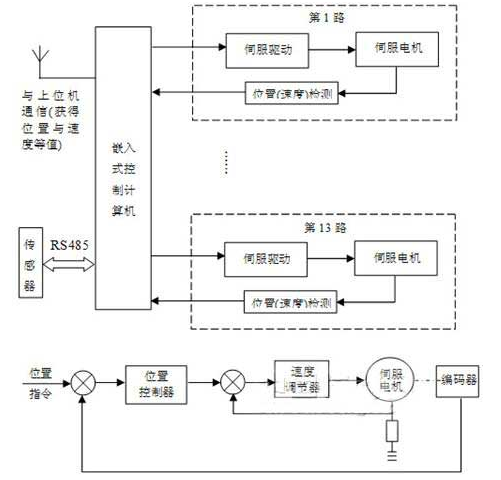
图5 自动控制原理图
嵌入式控制计算机根据上位计算机传来的位置与速度信号,对各个伺服机构进行位置与速度设定,按控制规律(如PID)对伺服电机进行控制,使实际位置按预计的速度跟踪或运动到目标位置。
机器人的手眼协调系统:机器人的手眼协调系统是本系统最大亮点之一。由于于补间器算法需要知道目标物与机器人基坐标(一般是机械人的腰关节底座),相对空间座标才能求解。而本系统目标物是在未知环境里。这相对坐标必须由于手眼协调系统来求解。排爆机器人机械手上装有双目系统,利用双目系统和目标物可构成“ 测矩三角型”,原理示意如图6。测矩三角型求得距离误差较大,需要利用激光测距的“光斑”辅助测矩,从而获得坐标物的空间座标。随着机器人的双目接近目标物,目标物与基坐标的相对坐标精度提高,经过数次双目逼近目标物之后,最终实现机械手准确地抓到目标物。
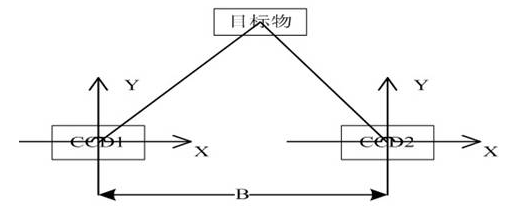
图6 测矩三角型原理图
当机器人自动抓取失败之后,操纵者可利用手动系统完成抓取。这是任何一个产品在自动失灵之后必须具备的功能。机器人的双目获得的图像信息,通过处理,在控制台的显示器上形成监控图像,以便操控者以鼠标点取多个物体中的可疑物体。
4 控制系统的通信系统
机器人与现场操纵控制台主控计算机之间采用串口无线通讯。现场主控计算机与远程监控中心采用CDMA通讯技术进行无线图像传输。通讯系统中任何一点均可观察到现场目标物和机器人的状态。
在实验室和工业应用中,受信道成本限制,串口常常作为计算机与外部串行设备之间的首选数据传输通道,而且由于串行通信方便易行,许多设备和计算机都可以通过串口对外设进行控制、检测,串口通信日益成为计算机和外设进行通信、获取由外设采集到的监测数据的一个非常重要的手段。为了解决有线通信的局限性,考虑到机器人自规划、自组织、自适应能力强、所处环境不确定的特点,无线通信是实现机器人与计算机之间通信的理想方式。因此采用无线数传模块进行数据信号传输是排爆机器人中重要的一环。无线数传模块体积小、使用方便,能远距离地操控机器人从而有效保护操作人员安全。
所谓CDMA(码分多址技术)是一种以扩展通讯系统为基础的载波调制与多址连接技术。CDMA具有许多的优点,其中一部分是扩展系统所固有的,另一部分是由软件切换和功率控制所带来的,CDMA通讯网络是由扩频网、多址接入、蜂窝网络和频率再用等技术结合而成,含有频域、时域和码域三维信号处理的一种协作,因此它具有抗干扰性能好、抗多径衰落、保密安全性能高.
5 结论及展望
本文的创新点在于此排爆机器人控制系统是一个开放式控制系统,该控制系统成功的结合了双目视觉测距、智能控制算法,实现了机器人的智能化和网络化功能。该设计的适用性很广,只要依据需求进行适当修改即可设计出适用其他功能机器人的控制系统,具有较高的参考价值。
通过该系统的研究与开发,必将提高排爆机器人的自动控制水平,提高排爆机器人的操作性与可靠性,对于保障公共安全、提高排爆效率有很大帮助。
责任编辑:gt
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 2649
-
什么是嵌入式计算机2021-10-27 2271
-
基于RTX51操作系统实现地面移动机器人控制系统的设计2021-06-21 4217
-
基于RTX51的排爆机器人嵌入式控制器软硬件开发怎么样?2021-06-07 1689
-
基于排爆机器人PBJ-1的嵌入式控制系统的设计与解决方案2020-01-22 3912
-
RIO嵌入式控制平台怎么助力机器人应用?2019-11-06 3134
-
嵌入式服务机器人控制系统能实现什么功能?2019-10-15 2640
-
如何利用ARM研究嵌入式服务机器人控制器?2019-07-30 3284
-
嵌入式系统在机器人中的应用2018-07-06 3809
-
计算机控制系统--嵌入式PLC2016-12-11 753
-
排爆机器人的设计与应用2013-10-18 8
-
嵌入式计算机在机器人直流伺服控制中的应用2011-08-18 1006
-
用于机器人的RIO嵌入式控制平台2010-03-11 1360
-
智能轮式移动机器人嵌入式控制系统设计2010-03-01 2490
全部0条评论

快来发表一下你的评论吧 !
