

为什么要使用激光雷达?与其传感器优劣对比
描述
前面介绍了激光雷达和行业参与者,那么为什么要用激光雷达,若如马斯克所说“傻子采用激光雷达”,为什么会有这么多参与者在为了“傻子”服务?
这就要说下目前车载感知主要的传感器:毫米波雷达,摄像头和激光雷达。
超声波雷达这里因为探测距离不能很远,一般只有几米,应用场景受限。但由于其近距离极高的探测精度,和随距离极高的能量衰减,所以非常适合作为低速近距离探测,我们经常看到的倒车雷达,以及高端车型上一周的超声波雷达及盲区探测雷达,都是其典型的应用,这里不做重点介绍。
下表为毫米波雷达,摄像头和激光雷达的优劣势汇总
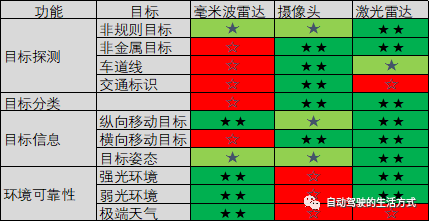
由以上的表可知,我们可以列举出各个传感器短板的非常非常多种场景,可以导致传感器返回的感知信息存在不可靠,这种情况下,就会要求各个传感器进行互补,从而提高感知返回信息的可靠度。比如,仅有毫米波雷达和摄像头存在的情况下,在应对一个夜晚行人横穿马路的场景情况,就有很大概率产生感知错误,从而造成严重的交通事故。
相对静止的物体似乎是自动驾驶和辅助驾驶在技术升级之路上的一大障碍。
a、2016年5月,美国佛罗里达州一位男子驾驶开启着Autopilot系统的特斯拉Model S,撞上一辆正在马路中间行驶的半挂卡车,导致驾驶员当场死亡;
b、2018年初,在洛杉矶405高速公路上,一辆特斯拉Model S撞上了一辆停在路边的消防车,司机正在使用AutoPilot功能;
c、2018年,中国发生的首例“特斯拉自动驾驶”车祸致死案,车辆同样是在开启AutoPilot模式下撞上一辆停泊在高速路旁的道路清扫车;
d、2019年3月,还是在美国佛罗里达州,一辆特斯拉Model 3以110km/ h的车速径直撞向一辆正在缓慢横穿马路的白色拖挂卡车,驾驶员不幸罹难。
那么有了激光雷达自动驾驶车辆感知是否就足够支持车辆的无人驾驶了?目前来看虽然有了激光雷达,依然会有一些Corner case无法有足够的探测可靠性。比如,雨雾天气下的行人,会让毫米波雷达,摄像头和激光雷达都无法100%识别。
那么既然加了激光雷达也无法让车辆在各种情况下感知无“死角”,为什么还要加上昂贵的激光雷达?我想用一个问题让大家自己去思考下,既然倒车影像无法100%避免倒车事故,为什么倒车摄像头现在普及了,甚至有了立法来确保车辆必须有倒车摄像头?这个例子依然不足以完全说明激光雷达上车的必要性,还有自动驾驶车辆的自动驾驶等级在L3以上后,驾驶主体就由驾驶员转变为了车辆,相应的事故责任也可能由驾驶员变成了整车厂。这种情况下,整车厂就要必须尽可能的去满足能想到的所有应用场景,并给出应对方案,甚至是降级方案。
另外,我们再回来理解下马斯克的观点,在弱感知强算法和强感知弱算法的取舍中,显然马斯克选择了弱感知强算法。强算法的逻辑让马斯克进行了FSD芯片的自研,影子模式的算法改进。但再强大的算法也无法弥补感知信息错误带来的影响,而且目前的AI算法再强大,也是在初级阶段,无法和进化了几千年的人的大脑媲美,这个“弱感知强算法”中的“强算法”其实和人类的大脑相比,根本算不上强。比如,人很容易看出在地上的“Stop”标识,而目前最强的AI,在不同角度下的判断也无法全部准确判断。
回到激光雷达本身,从之前的机械旋转式,现在发展到半固态,后期可预见的全固态,激光雷达成本有了大幅度的下降,下降的程度大到足以满足激光雷达作为一个感知传感器上车的程度。所以之前在Robotexi和自动驾驶物流车上才有的激光雷达,纷纷出现在了各家的乘用车上,如小鹏,NIO,极狐,WEY等等等等。
所以为什么要用激光雷达,我给出的答案就是:
激光雷达可以作为毫米波雷达和摄像头的补强——架构工程师喜欢
激光雷达点云带来的附加效果——算法工程师喜爱
激光雷达成本的大幅下降——采购工程师喜欢
激光雷达不断增加的质量可靠性——质量工程师喜欢
激光雷达高识别度的造型——客户喜欢
这样一个大家都喜欢的传感器,没有道理不上车使用啊!
编辑:lyn
-
激光雷达与其他传感器的比较2024-10-27 2807
-
详解无人驾驶传感器:摄像头、激光雷达、雷达、温度传感器2023-12-07 2998
-
激光雷达与视觉感知的优劣对比2023-09-28 2564
-
【北醒TFmini-S 测距/避障激光雷达传感器试用连载】——上位机测试2020-06-13 3190
-
【北醒TFmini-S 测距/避障激光雷达传感器免费试用连载】基于北醒TFmini-S 测距/避障激光雷达传感器关键地区人员靠近防撞提醒装置2020-05-28 3115
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 5824
-
激光雷达传感器Alpha Prime有什么创新2019-11-19 5891
-
相比其他传感器 激光雷达有哪些优点?2019-10-10 5038
-
无人机激光雷达传感器技术2019-03-08 3195
-
北醒固态设计激光雷达2018-01-25 5919
-
消费级激光雷达的起航2017-12-07 7538
-
激光雷达面临的机遇与挑战2017-09-26 6772
-
常见激光雷达种类2017-09-25 14056
-
激光雷达是自动驾驶不可或缺的传感器2017-09-08 5374
全部0条评论

快来发表一下你的评论吧 !
