

怎么样利用AXI Quad SPI快速打通Linux至PL端SPI从设备?
描述
[导读] 前面写过篇介绍ZYNQ基本情况的文章,今天来肝一篇实战文章介绍AXI quad SPI 使用方法,如果你正使用ZYNQ的这个IP,希望对你有所帮助。
初识AXI quad SPI

自《PG153 AXI Quad SPI v3.2》
支持:
Legacy Mode
standard mode: 准SPI通常就称SPI,它是一种串行外设接口规范,有4根通信脚:SCK (时钟), CS(片选), MOSI(主出从入), MISO(主入从出)。
Dual/Quad SPI Mode:
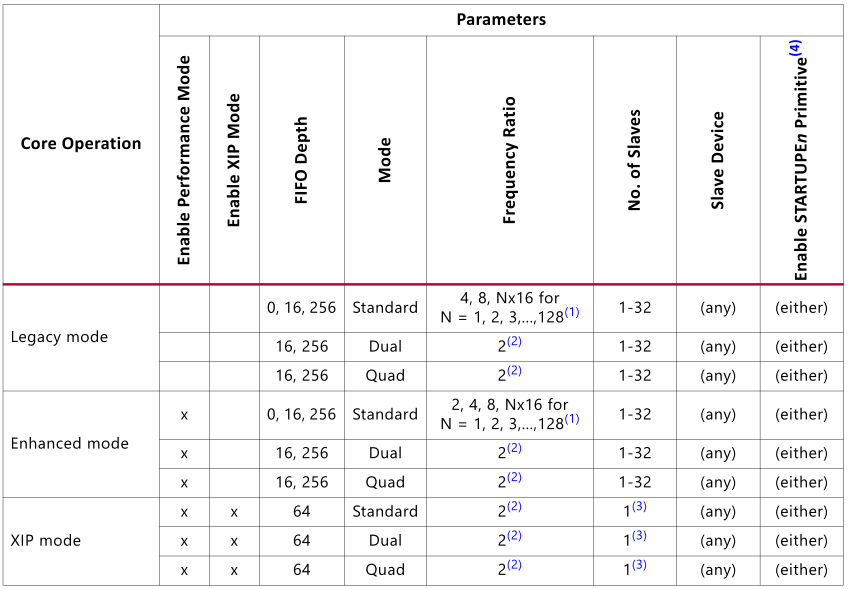
AXI Quad SPI 模式
在标准模式下,支持高达32个从站,这是非常灵活的指标。本文对于手册中的详细技术细节不做过多阐述,有兴趣的自行深入阅读研究。
该SPI IP能干神马呢?
完成如下这样一个应用场景:
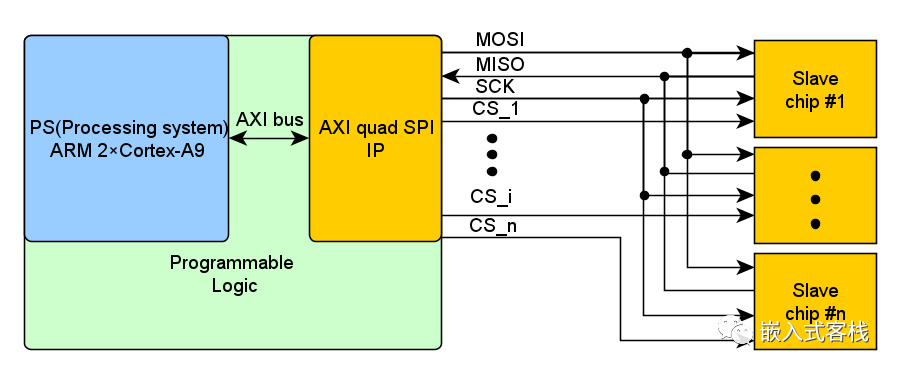
SPI IP访问多从SPI芯片
所需要实现的需求用例为:
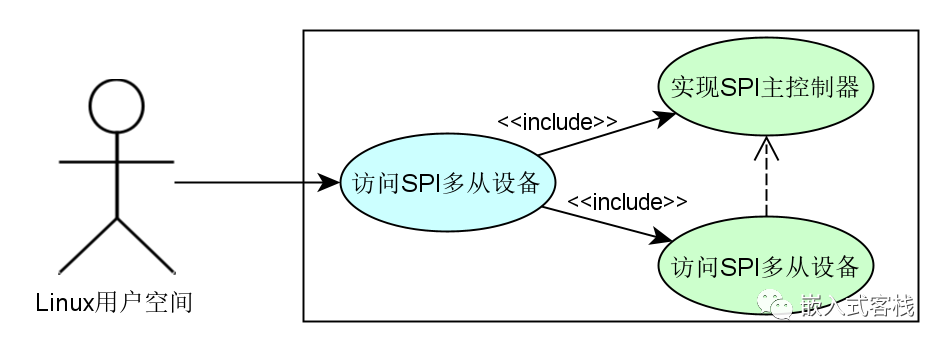
本文实现用例描述
利用AXI quad SPI 实现SPI外设控制器
实现SPI外设控制器驱动
实现多SPI从设备挂载在SPI总线
实现用户空间访问多从SPI物理从设备
从软件分层的视角来看,上述的需求需要实现下面的访问层级:
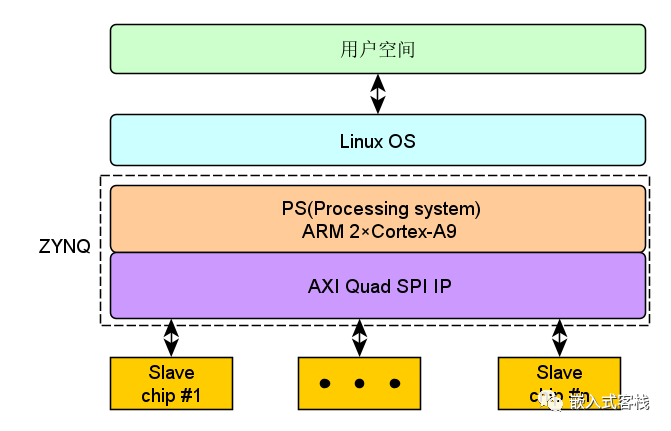
PS/PL软硬件层次架构图
为什么要研究这个呢?实际用ZYNQ芯片做产品时,很有可能外部有多个SPI从设备芯片需要利用Linux访问,你或许会说ZYNQ的PS端不是自带了两个SPI控制器吗?但有时候项目中这两个SPI对应的引脚可能用做其他用途了,而一个复杂的项目中又不得不使用多个SPI从设备芯片时,本文所讨论的话题就能很好的解决这样的需求场景了。通过本文,你会发现,原来ZYNQ的SPI IP是如此灵活好用!
本文目的实战描述,如何一步一步从PL端设计:
block design
约束
综合
导出
乃至PS端:
SPI驱动配置
设备树修改
系统编译部署
设备驱动测试
按照这个流程,那么第一步需要设计PL端与PS端的配置,且看:
AXI Quad SPI 之配置
从IP catalog中按下图从ip库中添加如下IP:
ZYNQ7 processing System
AXI interconnect
AXI Quad SPI(可根据需要添加多个)
Processing System Reset(添加ZYNQ7 processing System 点自动连线会自动添加,当然也可以手动添加)
Concat
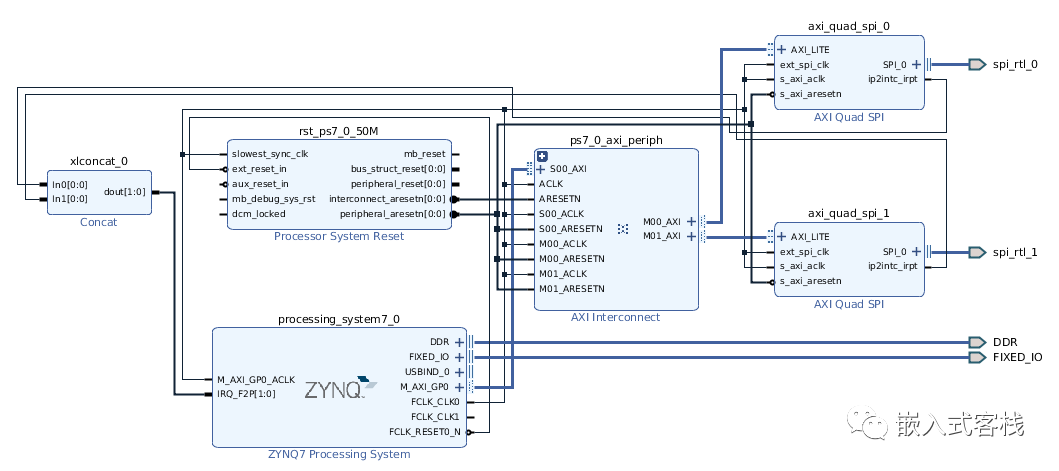
Block设计图
使能ZYNQ7 processing System的时钟PL Fabric clocks,用以驱动PL端的IP:
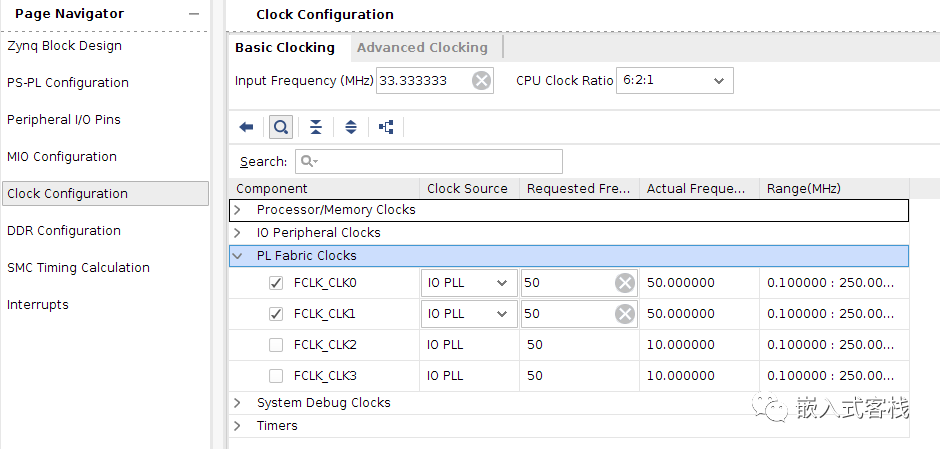
PL Fabric clocks设置
使能M AXI GP0接口如下:
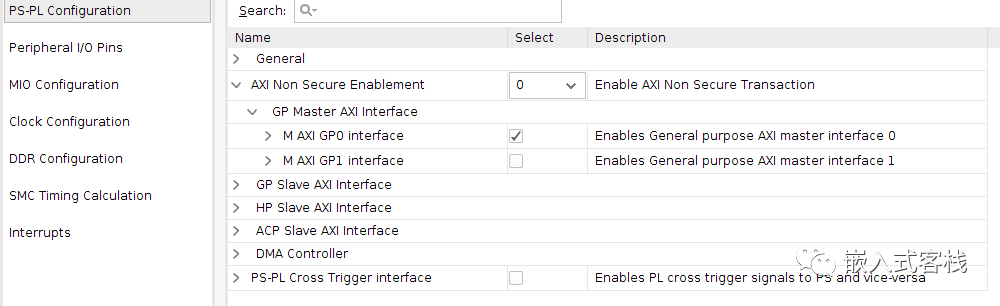
M AXI GP0设置
双击AXI interconnect,设置2主1从:
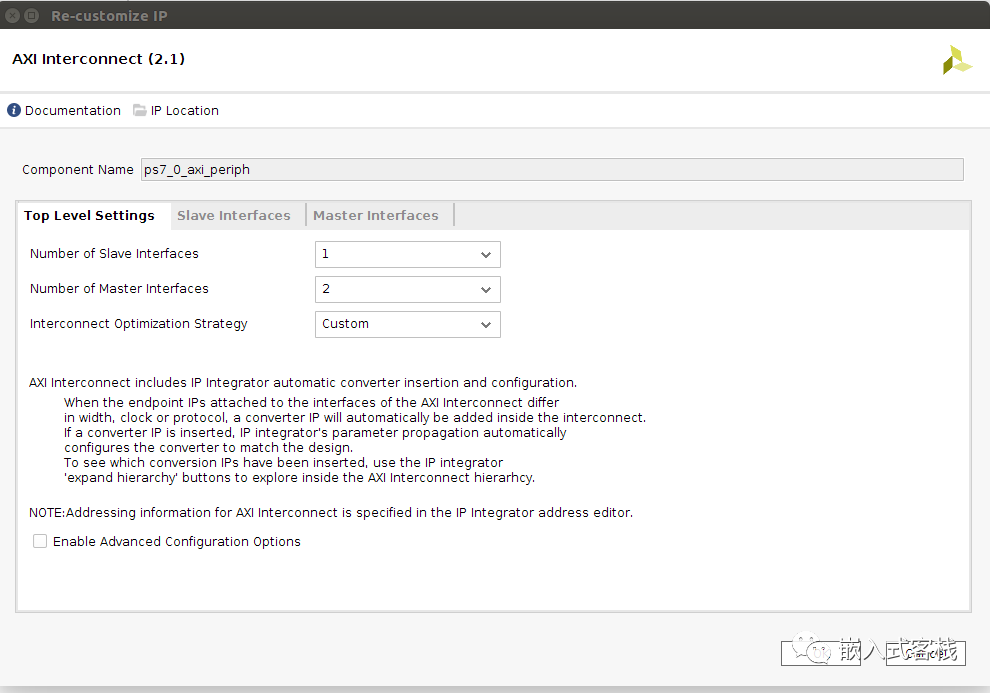
AXI interconnect设置
双击axi_quad_spi_0设置如下,设置4个从设备(最多可支持32个从设备,PS端内置的SPI控制器1个最多支持3个从设备,从这一点可看出该IP的灵活性)
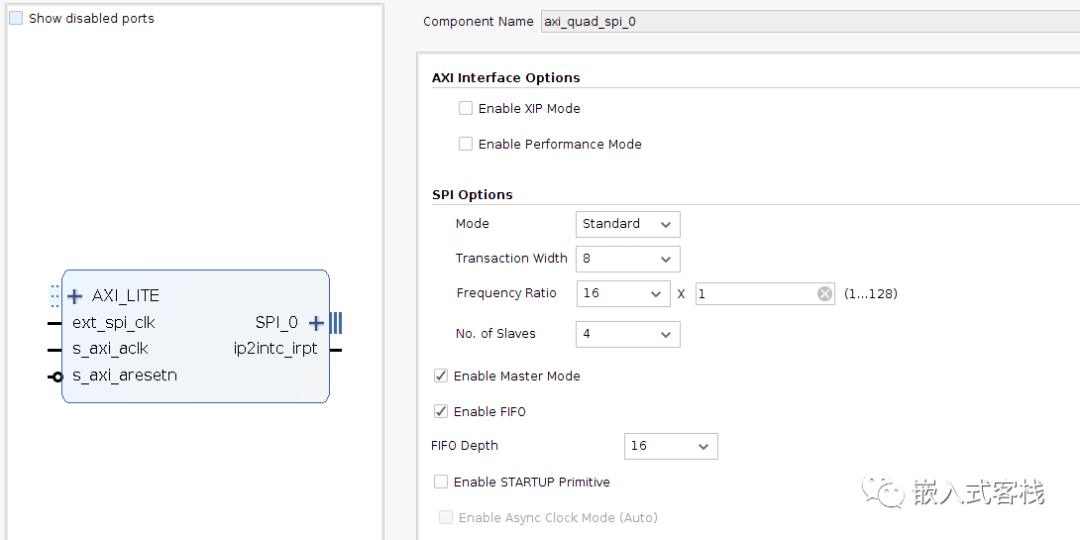
axi_quad_spi设置
同样将axi_quad_spi_1设置为2个从设备接口。
然后按照前面的连线图,将各块连接好,做过硬件的盆友会比较适应,这就像画原理图一样,就将各IP建立了逻辑连接关系了。除此之外,对于一个ZYNQ的板子而言,你还需要做如下的PS端设置:
DDR RAM设置,根据自身的板子的内存芯片以及内存大小进行设置
Peripheral IO外设设置,比如SD卡,UART,QUAD SPI Flash,erthernet等
clock时钟系统设置,根据板子的情况进行设置CPU、DDR时钟频率、IO时钟等
......
至于这些怎么配置,比较常见这里就不赘述了。
对于AXI quad SPI外设还有一个很重要的配置,就是其地址范围:
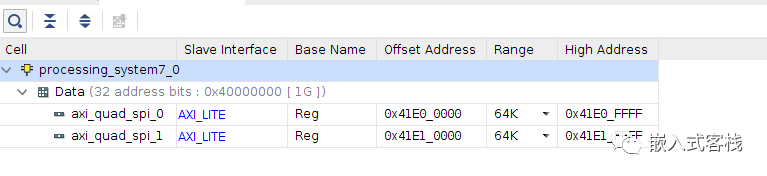
AXI quad SPI地址设置
该地址最终将导出到设备树描述文件,用于SPI控制器驱动访问,从而让SPI控制器驱动得以与该IP通过AXI总线进行通信。
导出硬件文件
点击open elaborated design ,然后打开io ports进行管脚分配,这需要根据各自的硬件实际情况进行设置,比如我是这样设置的:

管脚约束设置
电平标准
是否上拉
驱动能力
.....
然后点击Run synthesis进行综合,成功之后点击生成bit stream。再点击export hardware,得到.hdf文件,这个文件用于构建内核。
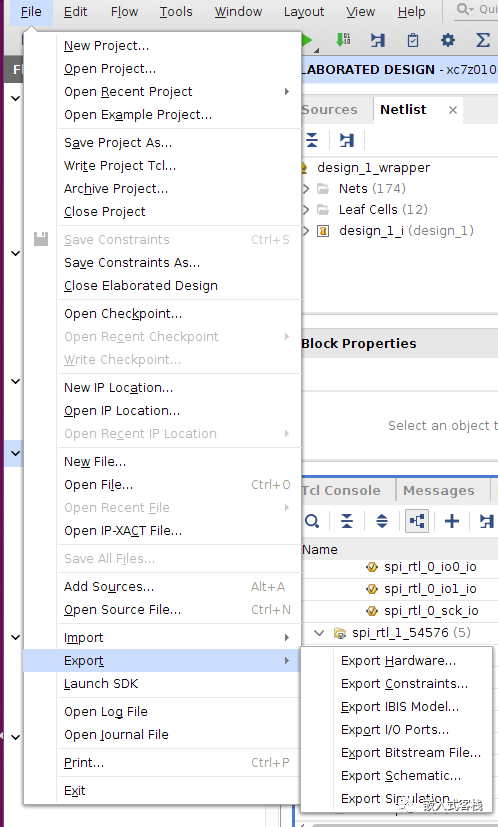
导出硬件描述文件
将得到的硬件描述hdf文件以及bitstream文件拷贝至内核编译文件夹下:
硬件描述及bit文件
配置编译内核
运行命令读取硬件描述文件:
petalinux-config --get-hw-description ../base.sdk
注:这里将hdf文件以及.bit文件放置在petalinux编译路径的上级目录的base.sdk,根据习惯可自行设置,只有上述命令传入的路径正确即可。
等待一段时间后,可得到一个配置界面,用于配置内核源、u-boot源、Image 等配置。
petalinux-config
根据实际情况配置好后,退出配置并保存配置。使用过的会比较熟悉,这里不赘述了。
配置设备树
编辑用户设备树文件,用户设备树文件在下面路径中:
./project-spec/meta-user/recipes-bsp/device-tree/files/system-user.dtsi
配置设备树如下:
/include/ "system-conf.dtsi" / { }; &axi_quad_spi_0 { status = "okay"; clock-names = "axi_clk", "axi4_clk", "spi_clk"; clocks = <&clkc 15>, <&clkc 15>, <&clkc 15>; spi0_dev_0@0 { compatible = "spidev"; reg = <0>; spi-max-frequency = <500000>; #address-cells = <1>; #size-cells = <1>; }; spi0_dev_1@1 { compatible = "spidev"; reg = <1>; spi-max-frequency = <500000>; #address-cells = <1>; #size-cells = <1>; }; spi0_dev_2@2 { compatible = "spidev"; reg = <2>; spi-max-frequency = <500000>; #address-cells = <1>; #size-cells = <1>; }; spi0_dev_3@3 { compatible = "spidev"; reg = <3>; spi-max-frequency = <500000>; #address-cells = <1>; #size-cells = <1>; }; }; &axi_quad_spi_1 { status = "okay"; clock-names = "axi_clk", "axi4_clk", "spi_clk"; clocks = <&clkc 15>, <&clkc 15>, <&clkc 15>; spi1_dev_0@0 { compatible = "spidev"; reg = <0>; spi-max-frequency = <500000>; #address-cells = <1>; #size-cells = <1>; }; spi1_dev_1@1 { compatible = "spidev"; reg = <1>; spi-max-frequency = <500000>; #address-cells = <1>; #size-cells = <1>; }; };
这里直接使用内置spidev兼容从设备驱动,当然如果需要自己定义一个SPI设备驱动也是非常容易的,但是对于大部分普通的SPI从芯片而言直接使用spidev设备驱动即可,只需要在读写时按照芯片手册协议进行访问即可。
配置内核
运行下面命令进行内核配置:
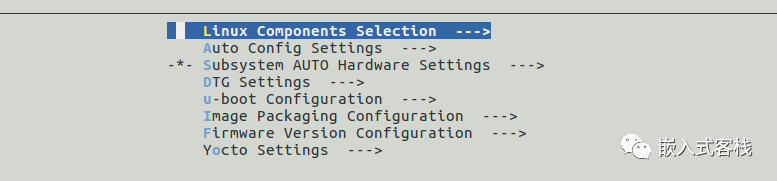
petalinux-config -c kernel
内核配置
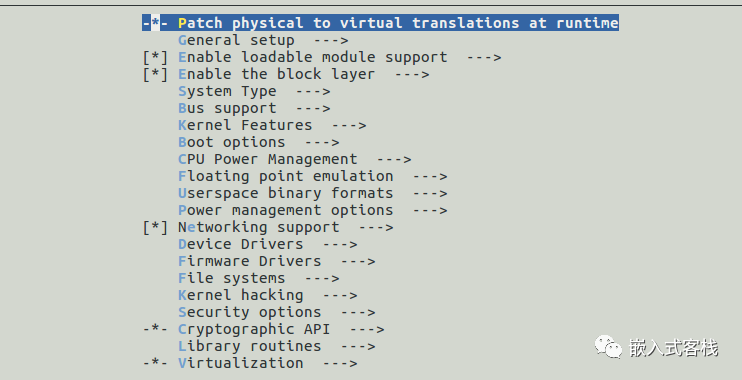
对于本应用而言,需要配置SPI驱动:
Device Drivers ---> +-SPI support--->
配置如下:
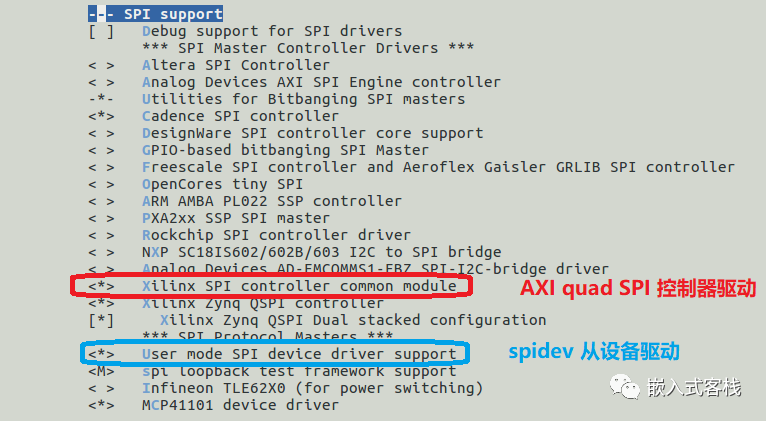
SPI控制器及设备驱动配置
这里调试中遇到一个奇怪的问题,CONFIG_SUSPEND需要禁止,否则控制器驱动加载不成功,目前还没有深入研究为什么不成功,猜想可能是主控制器驱动关于SUSPEND功能还不支持或者有bug,如果有哪位大神知道怎么解决请求留言指点。
Power management options ---> Suspend to RAM and standby

功能管理配置
退出并保存配置,然后运行下面命令编译系统:
petalinux-build
等待编译成功后,运行下面命令将bitstream文件包进BOOT.bin中。
petalipackage --boot --fsbl ./images/linux/zynq_fsbl.elf --fpga ../base.sdk/design_1_wrapper.bit --u-boot --force
将得到下面的输出信息,表示操作成功:
INFO: File in BOOT BIN: "/home/zynq/ALINX/spi_ip/ax_peta/images/linux/zynq_fsbl.elf" INFO: File in BOOT BIN: "/home/zynq/ALINX/spi_ip/base.sdk/design_1_wrapper.bit" INFO: File in BOOT BIN: "/home/zynq/ALINX/spi_ip/ax_peta/images/linux/u-boot.elf" INFO: Generating zynq binary package BOOT.BIN... INFO: Binary is ready. WARNING: Unable to access the TFTPBOOT folder /tftpboot!!! WARNING: Skip file copy to TFTPBOOT folder!!!
注:/home/zynq/ALINX/spi_ip/ax_peta 是本文工程的目录
测试SPI从设备
编写驱动测试程序,代码如下:
#include
编译:arm-linux-gnueabihf-gcc test.c -o test
将编译所得的BOOT.BIN以及image.ub文件拷贝至制作好的SD的BOOT区,test文件拷贝至/home下。然后插上SD卡上电运行电路板:
登录控制台后,运行ls /dev查看spidev设备是否加载成功:
spidev设备挂载情况
可见spedev1.0、spidev1.1以及spidev2.0--spidev2.3加载成功,与预期一样。
然后运行测试程序:
root@ax_peta:/run/media/mmcblk0p2/home#./test /dev/spidev1.0 78aa Test wr: 78 aa
用示波器或者逻辑分析仪观察对应引脚,将出现正确的SPI通信波形。
总结一下
至此,就基本实现了从PS端Linux用户空间访问PL端的SPI从设备了。当然实际项目中还有很多细节需要进一步研究:
CPOL/CPHA 组合四种模式设置
SPI通信速率设置
从设备应用协议程序编写
AXI Quad SPI FIFO特性的深入应用
AXI Quad SPI 其他模式及细节研究等
对于这些更细节的内容,相信在将基本框架搭建成功后,只要深入细致研究都不会有太大的难度。从本文可看出,ZYNQ之所以如此灵活好用,是其厂家或者第三方提供了大量成熟可供使用的IP以及配套的驱动程序。如有兴趣尝试用来开发项目,相信你会很快喜欢上这个体系的芯片,真的可以做到片上即可实现系统这一目标!
编辑:jq
-
有关PL端利用AXI总线控制PS端DDR进行读写(从机wready信号一直不拉高)2024-05-31 7917
-
在AXI QUAD SPI的综合放置中遇到错误2018-10-18 18383
-
[放置30-73] axi_quad_spi版本3.2的寄存器'IO1_I_REG'的约束无效2018-11-12 2033
-
怎么使用AXI Quad SPI IP Core对带有PROM文件的SPI Flash进行编程2019-03-14 5048
-
Axi quad spi怎么作为从属设备?2020-04-17 4095
-
请问是否可以像使用常规SPI闪存一样使用Quad SPI?2020-08-26 1731
-
ARM平台嵌入式Linux下SPI设备连接2017-09-16 1028
-
创建主/从SPI接口的两种方法详谈2017-12-30 8048
-
Linux下spi驱动技术分析2018-04-12 3558
-
SPI检测是什么,SPI检测设备的作用又是什么2020-07-08 32134
-
SPI主、从端数据通信建模的基础知识2020-09-08 4420
-
SPI基础,SPI是怎么样的?2020-11-19 5939
-
ZYNQ PS + PL异构多核案例开发手册之1axi_gpio_led_demo案例2021-09-07 3898
-
嵌入式Linux SPI驱动2021-11-01 780
-
【ZYNQ实战】利用AXI Quad SPI快速打通Linux至PL端SPI从设备2022-01-26 1422
全部0条评论

快来发表一下你的评论吧 !
