

基于MSP430F149单片机和短距离无线接入技术实现车辆传感器的设计
描述
作者:丁茹;林凌;韩晓斌;李刚
一。 引言
目前,高速公路和城市交通问题是世界各国的普遍性问题,它直接影响经济的发展和人们的生活。智能交通系统(ITS)是解决日益严重的高速公路和城市交通问题的有效途径,车辆检测器则是ITS中最重要的交通数据采集设备之一。感应线圈式车辆检测传感器因其具有稳定性好,性价比高等优点,故在工程上应用最广 。但现有的感应线圈式车辆传感器还存在一些缺点,如感应线圈的体积太大(1m×2m),需要安装馈线,安装工程量大,安装时需要阻断交通,感应线圈极易损坏,损坏后难于修复,使用寿命短等等。另外,为了避免漏检车辆,需要在路口安装多台车辆检测器,将检测数据通过电缆向上位机传输,并实现网络传输。为了解决这些问题,早在上世纪70年代末,J.F. Scarzello就提出了一种利用射频方式通信的磁性检测器,以便省掉馈线的安装,降低安装工程量。本文根据国内外车辆检测器技术的发展,采用微型线圈,并将单片机控制技术和新型的短距离无线接入技术ZigBee引入车辆传感器的设计中,不仅可以省去通信电缆的安装,降低安装工程量,还可以安全可靠地实现数据传输和网络互联,从而开发出适用性更强的车辆传感器。
二。硬件设计
感应线圈式车辆检测传感器由探测模块、电源模块、控制模块和通信模块组成,其原理框图如图1所示。探测模块是一个由探测线圈和反相器构成振荡器的选频模块;控制模块采用具有智能控制功能的低功耗单片机MSP430F149,用于测量振荡器频率的变化来判断是否有车辆通过,并管理和协调系统各部分的工作;电源模块采用可充电电池为车辆传感器供电; 发射模块用于与外界通信,发送检测到的相关信息。下面仅对主要电路的设计进行说明。
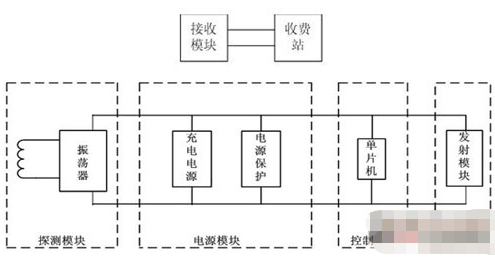
图1 感应线圈式车辆检测器原理框图
1 探测模块的设计
探测模块是一个由探测线圈和反相器构成振荡器的选频模块。由于传感器的振荡频率包含了被测信息,保持短期频率的稳定性十分关键;而且好的振荡波形有利于单片机测频,减少误判和漏判的发生。因此,从工作频段、频率稳定性和振荡波形三方面考虑,本文采用了电容三点式振荡电路[5~6]。另外,为了便于单片机测量,设计中加入了整形电路,其功能是将振荡电路产生的正弦信号整形成同频率的方波信号。具体电路如图2所示。
在设计中我们尽可能地减小了探测线圈的体积并且在线圈中加入了铁氧体磁芯。线圈体积的减小,大大降低了安装的工程量,同时使得线圈不容易受到损坏且容易维护;加入铁氧体磁芯,能够增加振荡器频率的稳定性和检测的灵敏度。
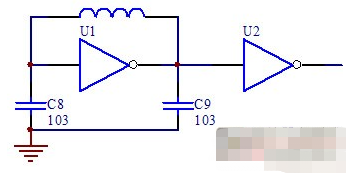
图2 检测电路
2 电源模块设计
电源模块采用可充电电池为车辆传感器供电。电源模块通过电源管理芯片和控制模块进行管理。当电源管理芯片检测到电源的电压低落时,发射模块发射需要充电的信号,通知工作人员对车辆传感器的电池进行充电。当电池电量充满时,发射模块发射停止充电的信号,通知工作人员停止对车辆传感器的电池充电。电源保护电路对电源进行过度充电保护、过电流/短路保护和过放电保护。充电方案设计如图3所示。
图3 充电方案
另外,充电控制模块选用了TI公司的bq2000芯片核心。该芯片可用于镉镍、镍氢、锂离子电池的可编程快充电,具有检测电池类型并进行相应优化充电和中止充电的功能,可避免欠充、过充对电池的损坏,从而实现安全可靠的快充控制。
3 射频模块设计
发射模块用于与外界通信,发送检测到的相关信息。接收模块将接收到的信息上传至收费站或控制中心。本设计中我们选用了Chipcon公司的基于ZigBee 协议的CC2420EM射频模块。ZigBee是一种新型的短距离无线接入技术,与蓝牙相比,它具有低速率、低成本、低功耗、组网方便等优点。 CC2420是Chipcon公司推出的首款基于ZigBee技术的射频收发器。它只需极少外部元器件,性能稳定且功耗极低,可确保短距离通信的有效性和可靠性。利用此芯片开发的无线通信设备支持数据传输率高达250kbps,可以实现多点对多点的快速组网。CC2420EM模块集成了CC2420 及其所需的外围电路。MSP430F149通过高速SPI总线配置和控制CC2420[10],其接口电路如图4所示。
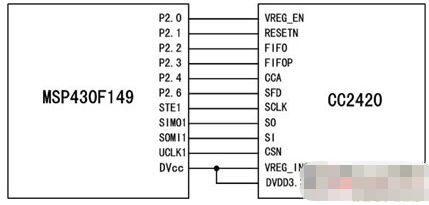
图4 MSP430F149与CC2420的接口电路
MSP430F149 通过4线SPI总线(STE1、SIMO1、SOMI1、UCLK1)控制和设置芯片的工作模式,并实现读/写缓存数据,读/写状态寄存器等。通过控制 FIFO和FIFOP引脚接口的状态可设置发射/接收缓存器,FIFOP引脚必须连接到单片机的中断引脚。通过CCA引脚状态可以得到空闲信道估计。通过 SFD引脚状态可以得到发射帧和接收帧的定时信息从而判断系统的工作状态,SFD引脚应该接到单片机的时钟捕捉引脚。
三。软件设计
根据车辆检测传感器的功能要求,结合硬件电路结构,系统的软件主要实现以下功能:
(1)测量频率的变化量,确定测量频率变化量的方案以保证系统的灵敏度。由于系统频率的本身的漂移,需对无车时的频率值进行校正,以消除系统误差;
(2)配置射频模块,设计数据帧以及车辆传感器组网设计。
软件总体设计流程图如图5所示。整个程序分为系统初始化程序、频率测量程序、通讯程序。
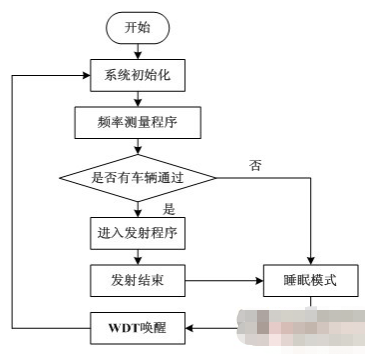
图5 主程序流程
系统初始化程序主要包括MSP430F149时钟的设置、各个通讯端口的设置,定时器的设置等。当系统设置好后,进入频率测量程序。频率测量程序主要包括频率变化量的测量、阈值的校准、抗干扰的处理。若没有检测到车辆,则系统进入低功耗模式。如果所测得频率值大于阈值,则进入发射程序,发射检测到车辆的信号。发射结束后系统进入低功耗模式,此时启动看门狗定时器(WDT),当看门狗定时器溢出时唤醒系统,进行下一次测量。
四。结束语
本文作者创新点:一是将新型短距离无线通信技术ZigBee运用于设计中,从而省掉了馈线,使传感器的安装快捷、方便,并运用新型单片机控制技术,提高传感器的灵敏度和可靠性,降低误检率,同时使传感器具有智能,可以显著地降低功耗和实现自检、功耗管理;二是采用新型的电源控制和充电控制芯片构成电源模块,大幅度延长传感器的使用寿命和简化管理。该传感器体积小,安装方便,对路面破坏小,易于维护,不但可以用于道路交通车辆检测,还可以用于智能停车场车位检测,有着广泛的应用前景。
责任编辑:gt
-
基于双MSP430F149单片机的车辆监控系统车载移动终端设计2023-11-17 614
-
MSP430F149单片机-IAP升级2021-11-19 998
-
基于MSP430F149单片机的无线低功耗大容量数据采集记录系统设计2021-10-26 968
-
基于MSP430F149单片机的智能玩具车设计2021-10-25 1071
-
怎么设计一种基于MSP430F149的无线传感器网络系统?2021-05-25 1820
-
MSP430F149单片机的例程源代码合集免费下载2020-10-09 1858
-
请问MSP430F149有内部温度传感器吗2019-03-06 3256
-
MSP430F149的无线传感器网络节点设计详析2018-05-02 1302
-
基于MSP430F149开发板的C应用2017-09-21 1043
-
MSP430F1492016-04-29 1204
-
基于MSP430F149单片机的语音无线传输系统2016-02-17 914
-
基于MSP430F149单片机的恒流电子负载系统设计2016-01-04 892
-
MSP430F149的无线环境监测传感器系统设计策略2010-04-20 1021
-
基于MSP430F149单片机的光电编码器位置检测系统设计2009-10-30 3301
全部0条评论

快来发表一下你的评论吧 !
