

探究关于DSP的农业机器人关节控制器
电子说
描述
本课题的研究目标是以实验室已有的有四个关节和一个末端执行器的采摘机器人为控制对象,研制四关节运动控制平台,实现高精度控制,同时尽量降低控制器的成本,以降低机器人的整体成本,从而促进将来农业机器人的推广和应用。
农业机器人不仅可以解决劳动力的不足,还可以提高劳动生产率,改善农业生产环境,农业机器人的研究在国内外受到广泛重视。控制系统是机器人的核心,决定机器人的性能和作业效果。基于pc104工控机和pmac2-104多轴运动控制卡的开放式控制平台在农业机器人控制系统中应用比较广泛,但价格昂贵。农业机器人的购买对象为农户,这就要求机器人的价格低廉。本课题的研究目标是以实验室已有的有四个关节和一个末端执行器的采摘机器人为控制对象,研制四关节运动控制平台,实现高精度控制,同时尽量降低控制器的成本,以降低机器人的整体成本,从而促进将来农业机器人的推广和应用。
农业机器人关节控制器的方案选择
控制精度高、响应速度快、价格低廉是农业机器人关节控制器三个最重要的设计指标。由于永磁同步电机具有结构简单、动态响应快、定位准确的特点。本研究采用安川公司的交流伺服电机作为执行电机。 机器人控制系统需要完成的任务相当大,对控制系统的硬、软件都提出了较高的要求,本课题所研究的控制系统采用上、下位机二级分布式结构。
利用pc机作为上位机,主要完成整个系统的管理、运动学计算以及通信任务;下位机控制器由4个独立的关节控制器组成,各关节控制器负责本关节的运动控制和反馈信号的处理,它们是并行工作的。
dsp(digital signal processor)芯片,如tms320x240x系列,内部集成了专用外设、具有硬件乘法器,采用哈佛结构,采用流水线操作的指令系统,并且采用特殊的dsp指令,从而具有快速指令周期,高速运算和进行大量数据处理的能力,可实现复杂控制算法。因此,本研究采用ti公司的tms320lf2407a芯片作为下位机的处理器,用来完成clarke变换、park变换、park逆变换、pid控制等功能。
该控制系统中采用三闭环(电流环、速度环、位置环)位置伺服控制方案,以保证控制系统的位置精度。系统控制框图如图1所示。
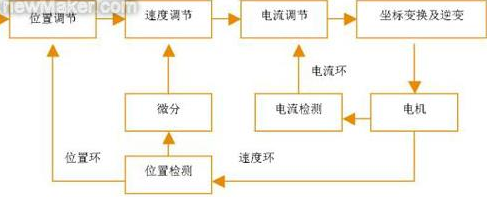
图1 系统控制框图
本研究中采用直轴电枢电流为零的控制策略[7]即pmsm定子电枢电流在控制过程中始终等于0,定子电流中只有交轴分量,且定子磁动势空间矢量与转子永磁体磁场空间矢量正交,电动机转矩中只有永磁转矩分量,电磁转矩与交轴电枢电流幅值成正比,控制转矩的大小实际上就落实到控制定子电流幅值的大小。本课题采用的交流伺服电机是表面凸极式pmsm,采用直轴电枢电流为零的控制策略时,单位定子电流可获得最大的转矩,铜耗下降,效率有所提高。
机器人关节控制器硬件结构设计
由于本课题采用矢量控制方法来控制伺服电机,每个电机需要6个pwm信号来控制智能功率模块ipm中igbt的通断,而每片dsp芯片只含有两个事件管理器,最多只能控制两个伺服电机。本课题制作了2块基于dsp的运动控制板,以控制四个交流伺服电机。图2为关节控制器硬件结构示意图。
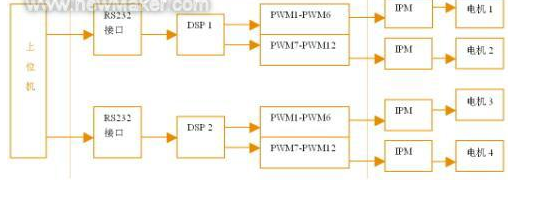
图2 关节控制器硬件结构示意图
机器人关节控制系统在硬件上分为两部分:基于dsp控制器的控制电路和基于ipm的伺服电机驱动电路。
关节控制器控制电路包括三大部分:tms320lf2407a最小系统部分、系统扩展部分和接口电路部分。其中最小系统部分包括电源电路、时钟电路、复位电路;系统扩展部分包括存储器扩展电路、总线扩展、显示电路;接口电路部分包括rs232接口电路、jtag仿真接口。
功率驱动电路板主要实现pwm逆变器功能,实现电机相电流的检测和位置检测。功率驱动电路主要有电源部分、逆变部分、隔离部分和电流采集部分。本研究中选择三菱公司的智能功率模块pm15csj060作为逆变模块,使用m57140模块为其提供4路15v的电压,采用hcpl4504作为光耦隔离器件,进行了电源电路,隔离电路和电流采集电路的设计。
机器人关节控制器软件设计
机器人关节控制系统软件包括基于pc机的上位机控制器软件和基于dsp控制板的下位机控制软件两部分。
上位机程序
上位机软件在microsoft visual c++环境下开发,主要包括4部分:人机交互界面的设计、系统主程序、运动控制函数库和通讯接口函数。上位机主程序工作在pc机上,用来实现整个系统的管理、控制工作。运动控制函数库是在实验室其他成员研究的运动学模型及求解结论的基础上,编写了相关的运动学运算函数。通讯接口程序实现上位pc机与dsp控制板之间的通讯,把上位机的运算结果传送到下位机,本课题采用的是api函数编程方式。
下位机程序
下位机控制器软件部分的设计是基于dsp的关节控制板,在ccs2.0开发环境下编写。下位机控制器软件主要包括3部分:初始化模块、主程序模块、中断模块。
系统初始化主要完成对dsp内核、事件管理器、通用i/o、sci和adc转换器等资源的寄存器进行设置。
主程序部分负责整个关节控制器的管理,设计成循环等待方式,在初始化和关节复位工作完成后,就等待各中断信号,如果有中断产生,则调用相关的中断程序。
中断模块:本课题使用了4个中断,功率保护中断、cap3中断、定时器1下溢中断和串口通信中断。其中,定时器1下溢中断子程序(int2)在定时器1计数溢出时被响应,用来调用控制算法,执行系统的矢量控制程序,每一个载波周期完成一次。
实验
为了测试本课题研究的农业机器人关节控制器的性能,对所研制的控制系统进行了试验。
试验用的4个交流伺服电机的型号为sgmah02a (2个)、sgmah01a、sgmaha5a 。将上位pc机、dsp下位机运动控制板、功率驱动板和伺服电机按设计要求连接好,接通电源,启动pc机,进入用vc++设计的人机交互界面。单个电机的运动试验环境如图3所示。
图3 单个电机运动试验环境
试验中设定各关节电机需要运行的圈数、速度和运转方向,点击“启动”键,电机开始运转。试验过程中分别对各个关节电机进行了调试,试验结果表明本课题所研制的关节控制器能实现电机的正、反转和速度调节。在电机长时间运行时,dsp控制电路板和基于ipm的功率驱动板状态良好。
编辑:jq
-
HCTL-2020 解码器及其在多关节机器人运动控制中的应用2009-12-17 7920
-
关节机器人控制2015-04-29 5481
-
机器人关节用什么电机?2021-05-27 4277
-
基于RS485的农业机器人与上位机可靠通信的实现2009-09-18 1139
-
基于DSP仿人机器人关节控制器设计2009-11-24 1560
-
基于DSP的草莓采摘机器人关节控制器的研究2011-02-26 1194
-
基于DSP和FPGA的四关节实验室机器人控制器的研制2017-09-01 1126
-
人工智能农业机器人有什么优点2019-07-02 5147
-
想做好农业机器人 鼓励和支持多学科交叉研究非常有必要2019-11-14 1282
-
农业机器人市场持续增长需面对的机遇和挑战分析2020-09-27 1779
-
基于DSP和PC的农业机器人控制系统2021-05-19 1541
-
74亿美元的农业机器人市场有四大难点需突破2021-07-17 16032
-
自主辅助农业机器人开源2022-11-01 761
-
基于鸿道(Intewell®)操作系统研发的农业机器人操作系统2024-04-30 1330
-
攻坚农业仿真挑战:Robotec农业机器人仿真平台2025-11-18 2564
全部0条评论

快来发表一下你的评论吧 !
