

光学镜头基本的参数和术语解释
描述
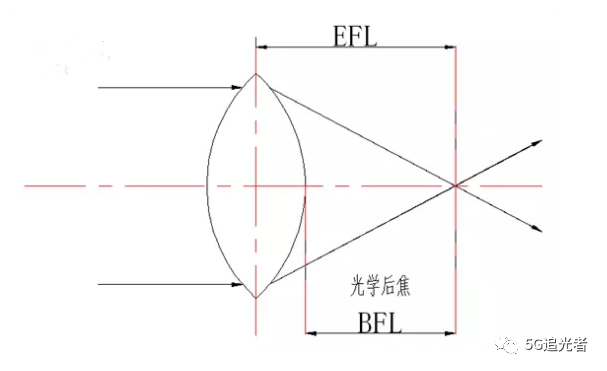
1、EFL(Effective Focal Length)有效焦距
定义:指镜头中心到焦点的距离(下图)。
镜头的焦距分为像方焦距和物方焦距(下图):
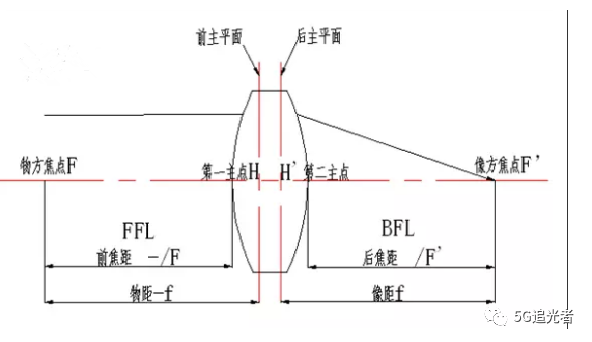
像方焦距是指像方主面(后主面)到像方焦点(后焦点)的距离。
物方焦距是指物方主面(前主面)到物方焦点(前焦点)的距离。
注意事项:
(1)焦距过短则视场角过大,导致畸变和主光线出射角难以控制,相对照度过低,镜片弯曲严重,相差校正困难,因此难以设计。
(2)焦距过长镜头将过长,不利于系统小型化,而且视场角过小,不能满足用户需求(FOV>60°)。
2、TTL(Total Track Length) 镜头总长
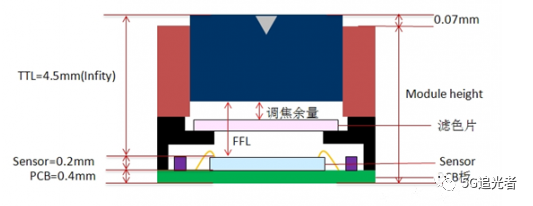
镜头总长分为光学总长和机构总长:
光学总长是指由镜头中镜片的第一面到像面的距离。
机构总长是指由镜筒端面到像面的距离,上图中TTL所示。
3、BFL(Back Focal Length)光学后焦距定义:
由光学系统中镜片的最后一面到像面的距离,上图中BFL所示。
4、FFL(Front Focal Length)光学前焦距
定义:由光学系统中镜片的第一面到物面的距离,上图中FFL所示。
注意事项:要与机构后焦距FFL区分
5、FBL/FFL(Flange Focal Length)机构后焦(法兰焦距)
定义:由镜组的最后一个机构面到像面的距离,上图中FFL所示。
6、FOV(Field Of View)视场角定义:
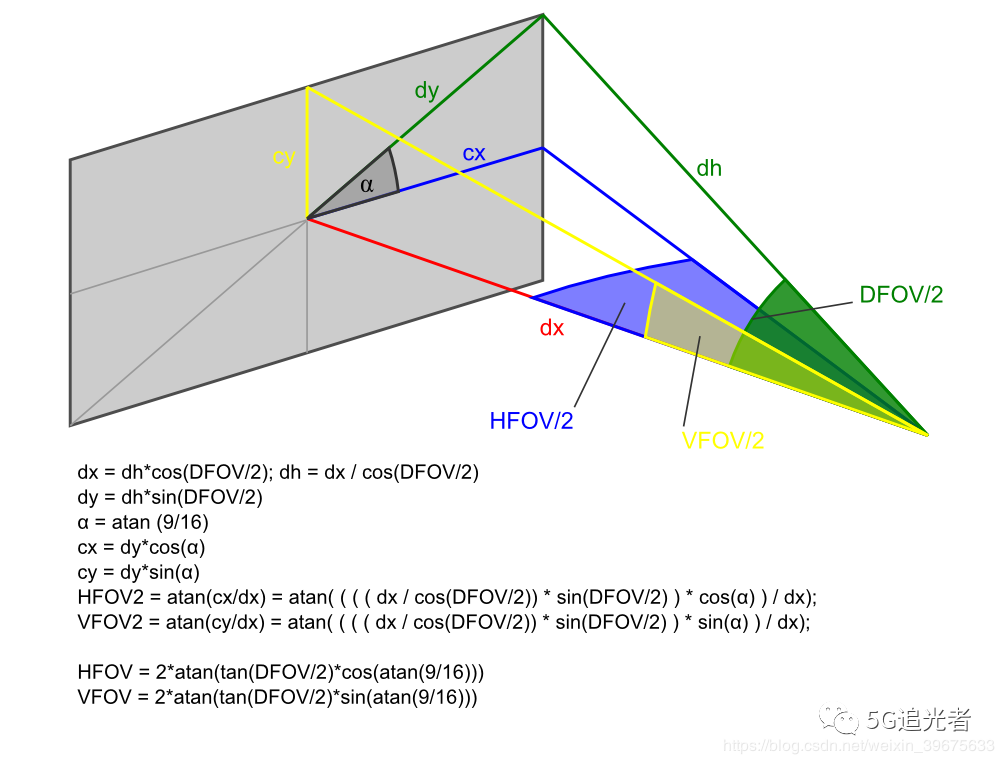
是指镜头能拍摄到的最大视场范围。
视场角可分为对角线视场角(FOV-D)、水平视场角(FOV-H)、以及垂直视场角(FOV-V)。
对角线视场角最大,水平视场角次之,垂直视场角最小。通常我们所讲的视场角一般是指数码摄像模组的对角线视场角。
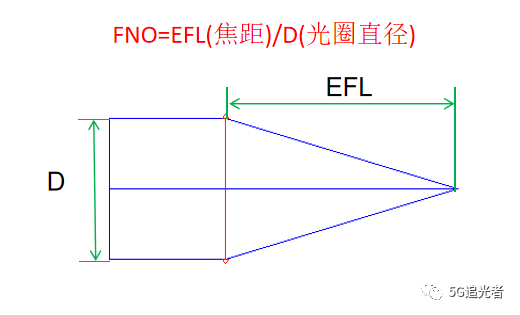
7、F/NO.(F-Number)焦数(相对孔径)
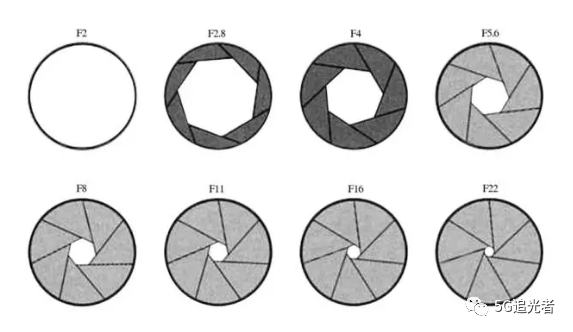
定义:有效焦距与入射瞳孔径的比值。
作用:用来决定镜头之明暗。
备注:在保证同样通光孔径的前提下,焦距越短相对孔径应越小。
一般情况下F/#越小通光孔径越大。
8、Distortion 畸变
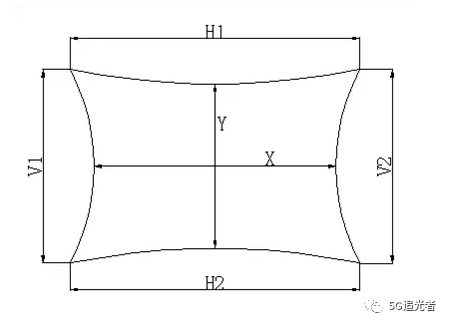
畸变是轴外相差。而且是轴外细光束的像差。它是轴外点与主光线在像面上交点的高度同理想(近轴)像面的高度差。它是视场的函数,与孔径没有关系,初级畸变随视场(像高)的三次方变化,而百分比畸变随像高平方增加,所以视场不同畸变也不同。畸变的变化不是线性的,仅是像的变形,不影响像的清晰度。
畸变分为TV畸变和光学畸变两种:
TV畸变:TV-Distortion
光学畸变:Optical-Distortion
TV畸变分为枕型与筒型两种。
(Vertical)TV-Distortion=[(V1+V2)/2-Y]/Y*100%
(Horizontal)TV-Distortion=[(H1+H2)/2-X]/X*100%
注意事项:
畸变是用户很容易感觉到的成像质量。
畸变是用户要求很严的镜头指标,
Optical-Distortion<3% 人眼不容易察觉
Optical-Distortion<2% 摄影物镜的畸变要求
一般要求:
CIF TV-Distortion<2.0%
VGATV-Distortion<1.5%
1.3M/2.0M/3.0MTV-Distortion<1%
9、RI(Relative Illumination)相对照度
照度的定义:物体或被照面上被光源照射所呈现的光亮程度称为照度。
相对照度则是中心照度与外围照度的比值。
注意事项:相对照度过低表现为图像中心较亮,而四周较暗,即渐 晕现象,俗称暗
角(Shading)。相对照度过低还会导致色彩失真。
RI与COS4(semi-FOV)成正比:RI∝COS4(semi-FOV)
Semi-FOV=30°,从理论上RI<56%
Semi-FOV=35°,从理论上RI<45%
当RI<50%时人眼是能分辨的,严重时会出现画面四角全黑的“缺角”现象。
因此RI的基本要求为:RI>50%
10、CRA(ChiefRay Angle) 主光线角度
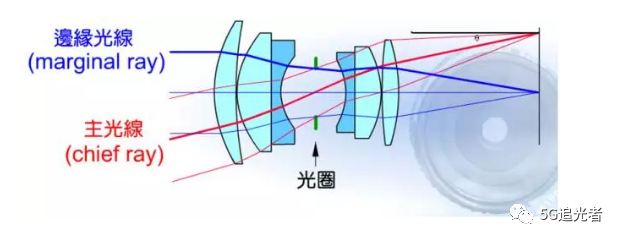
定义:主光线角度为主光线与平行光线的角度。
主光线就是光线由物体的边缘出射,通过孔径光阑的中心最后到达像的边缘。
注意事项:主光线出射角度不合适会暗角严重,对比度下降,偏色。
11、MTF(Modulation TransferFunction) 光学调制传递函数
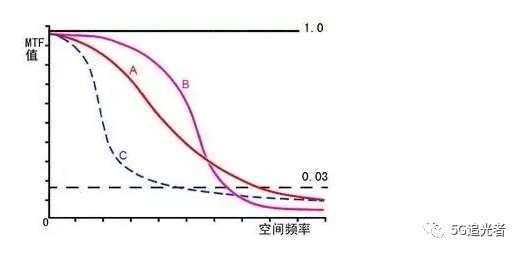
Modulation(M)的定义:Modulation是I的Maximum减去I的Minimum除以I的Maximum加上I的Minimum;也就是(光的最亮度减去光的最暗度)与(光的最亮度加上光的最暗度)的比值。所以得出来的结果M就是光的对比度。
Modulation(M) = (Imax-Imin)/(Imax+Imin)
I:Intensity 光强度
Imax: 最亮之光强度
Imin:最暗之光强度
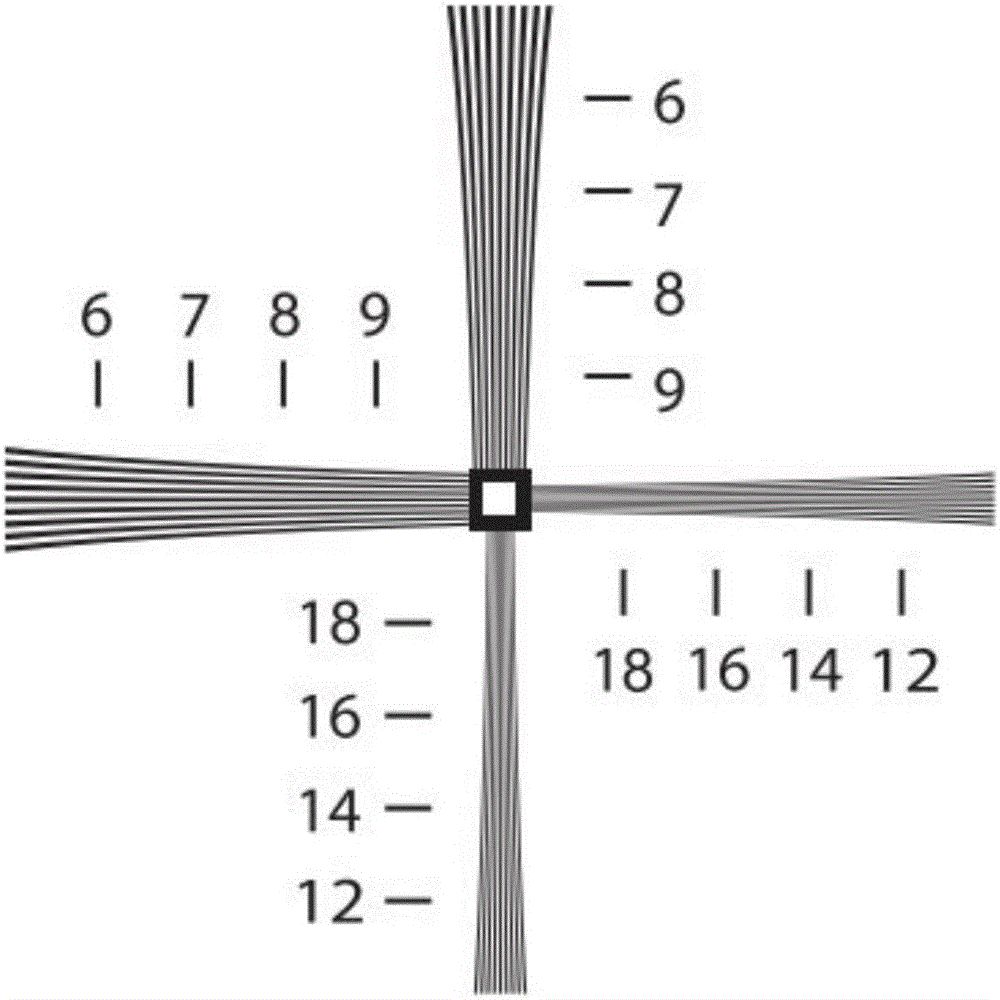
12、解像力(分辨率)
解像力的定义:为每1mm可解析的线对(line-pair)。单位为本(lp/mm)
备注:Sensor MTF的需求计算公式如下,
Sensor全频解像力:
1000/2.8/2=179lp/mm
(2.8um Pixel Size) 或 1/(2£)
£:SensorPixel Size
Sensor 全频解像力(黑白):1000/2.8/2=179lp/mm.
但对彩色(RGB)而言,Sensor是以每4pixel解析1点,所以Sensor所需要的本数计算为:中心 1000/2.8/2/sqrt 2=126lp/mm — 160lp/mm(中心通常解析会较高)
外围 1000/2.8/2/sqrt 3=103lp/mm — 100lp/mm(外围为0.7F)
(sqrt 2为一般计算方式,但不同厂牌或型号Sensor处理逻辑不同,会有差异)
13、TV-Line 扫描线
TV-Line就是在画面水平影像中可解析多少条线,可由解像力来换算:
TV-Line=lp/mm*2*Sensor宽。例1/4’’ 1.3M Sensor:
中心 1000/2.8/2/sqrt2=126lp/mm
—126lp/mm*2*1024*2.8/1000=722 — 700 TV-Line
外围 1000/2.8/2/sqrt 3=103lp/mm
—103lp/mm*2*1024*2.8/1000=590 — 600 TV-Line
14、Flare/Ghost 杂散光/鬼影
定义:指在一个光学系统里由于光在像面上随意的散射形成的相反的缩影或雾状像,也就是光学系统中的非成像光束。镜头表面的散射光、元件中的气泡、镜框及镜筒内壁的散射和反射光以及其它非成像光束入射到像面上的光都成为杂光。
它的直接影响是形成噪音,使图像的信噪比降低,甚至使信号光淹没在噪声中。
杂光的消除:在结构中增加遮光罩、辅助光阑、镜片边缘染黑、镜座发黑或贴消光布,以及镀制减反膜等。
15、景深
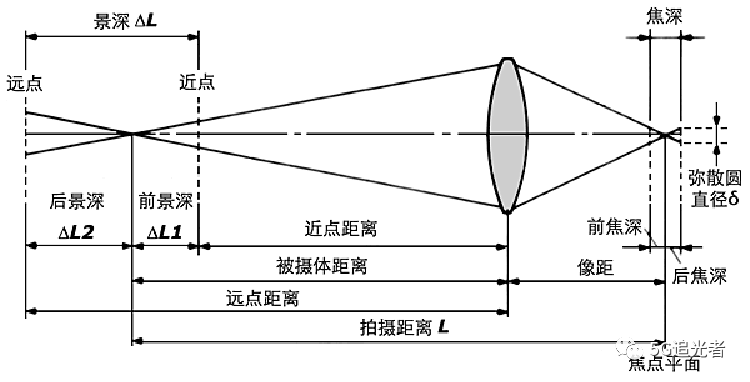
前景深 ΔL1= FδL2/ (f2 + FδL)
后景深 ΔL2= FδL2/ (f2 - FδL)
景深 ΔL =2f2FδL2/( f4 - F2δ2L2)
δ-容许弥散圆直径,
f-镜头焦距,
F-镜头的拍摄光圈值,
L-对焦距离,
ΔL1-前景深,
ΔL2-后景深,
ΔL-景深,
从公式可以看出,后景深 > 前景深。由景深计算公式可以看出,景深与镜头使用光圈、镜头焦距、拍摄距离以及对像质的要求(表现为对容许弥散圆的大小)有关。
超焦深的计算:f2 – FδL=0时,后景深为无穷远。在聚焦时,最好能将焦点聚在能产生超焦深的焦点处,从前焦深处开始聚焦,这样,画面处所有的画面都能清晰聚焦。
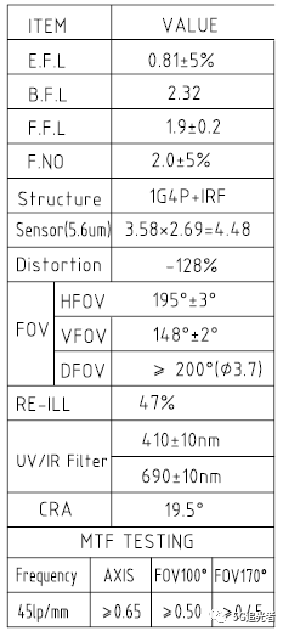
镜头规格参数例子:
原文标题:光学镜头基本参数解释
文章出处:【微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
工业相机的镜头参数在行业最新标准中是如何解释的2025-12-11 1022
-
光学测量镜头怎么选?2024-09-03 1477
-
工业镜头光学原理、优势及应用2024-07-15 2274
-
电磁兼容基本术语和定义的应用与解释.zip2022-12-30 561
-
机器视觉工业镜头专业术语的详解2021-04-28 1204
-
科普:示波器常用的术语解释2020-07-15 1201
-
深度解析光学镜头2019-02-19 3233
-
关于红外测温光学镜头2012-08-16 5506
-
LED专业术语解释2012-01-06 7016
-
电子类缩略语-专业术语解释2010-07-05 631
-
MP3术语解释2010-02-02 1143
-
镜头光学分析2009-06-14 2938
-
Allegro做padstack时的术语解释2008-03-22 3645
-
红外线光电开关术语解释2006-06-30 1542
全部0条评论

快来发表一下你的评论吧 !
