

浅述行人航位推算的室内定位技术综述
电子说
描述
摘 要: 行人航位推算系统(PDR)因其无需部署信标节点、成本低廉的特点被广泛应用于室内定位中。围绕基于行人航位推算的室内定位问题,对行人航位推算中步态检测、步长推算以及方向推算的研究现状进行了系统的梳理和述评,综述了基于行人航位推算的室内定位的发展及该领域的一些主要研究成果,指出了该领域现有研究存在的问题,提出了相应建议和深入研究的方向。
0 引言
近年来室内定位系统相当流行,基于室内定位的应用有很多,例如,监测病人在医院里的位置、消防员在失事建筑物内的位置等。
室内定位领域已有大量的相关工作,比如利用在不同位置的短距离信号(如WiFi、RFID、红外线等)的信号强度不同来建立射频地图。通过监测信号的变化,利用三角测量法可以确定人的位置。但是这种方法需要提前在建筑物内部署大量信标节点,而且信号容易受到环境干扰和多径效应。
相反,行人航位推测(Pedestrian Dead Reckoning,PDR)系统无需在建筑物内预装信标节点,利用惯性传感器(如加速度传感器、陀螺仪、数字罗盘等)计算步长和方向,即可推测出行人的踪迹。
1 PDR系统概述
PDR系统所使用的PDR算法,如图1所示[1],它是一种相对定位算法。图1中,E和N分别代表正东和正北方向。
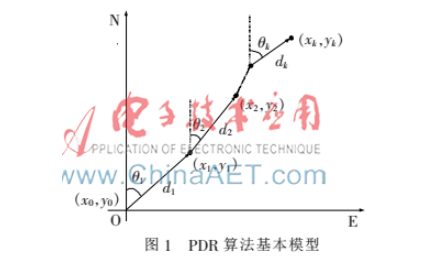
PDR算法:已知行人的起始位置(x0,y0),利用方位角θ1和步长d1,可以计算出下一步到达的位置(x1,y1),如此反复迭代计算,可以计算出行人第k步到达的位置信息如下
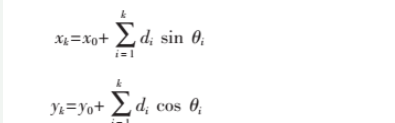
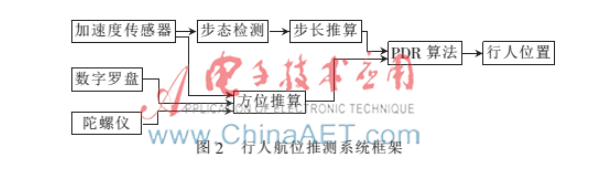
式中θi和di(i=1,…,k)分别代表第i步的方位角和步长。PDR系统的结构框架如图2所示。
2 步态检测
步态检测是基于惯性传感器的行人定位系统中的模块之一,步态检测算法分类如下。
2.1 时域分析
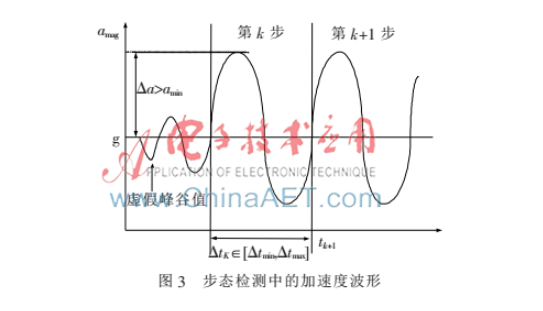
人在行走的时候随身携带的手机的加速度轨迹在时域呈现周期性变化。Qian J等人[2]提出利用手机内的三轴加速度传感器记录加速度轨迹,再从加速度轨迹中检测阈值,当然在行走过程中人持手机会有些小的异常抖动产生,如图3所示。时域分析方法除了阈值检测法之外,还有动态时间规整法[3]。
2.2 频域分析
频域分析的原理是人行走时的频率稳定在2 Hz左右,而其他行为的频率一般不在2 Hz附近,利用这一特点,参考文献[4]利用短期傅里叶变换(STFT)提取出人行为的频率,若在2 Hz附近,则认为是跨了一步。
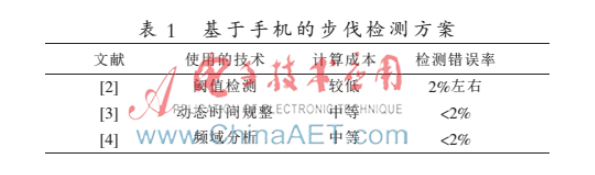
从上看出,时域分析方法较为直观易懂,缺点是在时域上容易受其他噪声的影响。频域分析方法主要是利用行走时所特有的2 Hz来区分行走和其他行为,但不够直观,比如很难区分人抬脚和落脚两种行为,因为其频率差别很小。表1从技术、计算成本和检测错误率方面出发,总结比较了一些基于手机的步伐检测文献。
3 步长推算
由于每个人的身高、走路的方式不同,所以每个人的步长也不一样,关于步长推算方面的一些研究文献总结如下。
3.1 常数模型
推算步长最直观的方法就是将一段测得的行走距离除以计数得到的步数,得平均步长,即认为步长是常数[5]。但是实际上由于人在行走时的姿势会有所变化,所以步长也会改变。
3.2 线性频率模型
模型A:
Li F等人[3]通过收集23个不同身高的人行走4 000步的数据,分析得到步长和频率呈线性关系,提出了线性频率模型:
L=a·f+b
a和b值通过大量线下训练求得,此方法计算成本较小,计算精度也较低。
模型B:
Renaudin V等人[6]提出基于步频和行人身高的步长推算模型:
L=h·(a·f+b)+c(1)
式中L是步长,h是身高,f是步频,K={a,b,c}是针对每个人的系数集合。实验结果表明该模型的步长推算错误率为5.7%,而计算成本依旧较低。
模型C:
Qian J[2]提出基于步频和加速度方差的步长推算模型:

式中f是步频,ν是每一步的加速度方差,K={α,β,γ}是每个人的系数集合。实验结果表明该模型步长推算精度较高,同时其计算成本也较大。
3.3 经验模型
Tian Z等人[1]提出了一种经验模型:

式中amax和amin分别是步态检测过程中的加速度最大值和最小值,C是比例系数,Tian Z等人采用了一种反向传播的神经网络来计算C的值,计算成本很高。
表2总结比较了一些基于手机的步长推算文献。
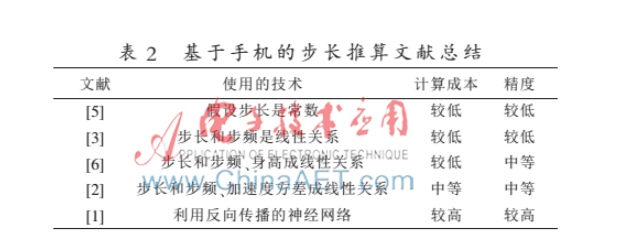
从表2可以看出,综合计算成本和精度两方面,文献[6]最理想,尽管文献[1]精度更高,但其计算成本较高,不适合实际应用。
4 方向推算
已知步长,还必须知道步行方向才能计算出行人的位置。通常智能手机上都有数字罗盘(方向传感器),它能测出手机的Y轴投影到水平面时和地磁北极的夹角,即手机的方向角。但此方法存在地磁偏差和位置偏差。为了克服以上偏差,很多文献方案提出融合其他传感器,根据使用的传感器类型不同,可将这些方案分为如下两类。
4.1 融合惯性传感器
由于智能手机里集成了很多惯性传感器(如加速度传感器、陀螺仪),它们可以和数字罗盘结合起来使用。例如用加速度传感器测得的加速度轨迹可以用来确定一类时间点,在这类时间点上的位置偏差和在起点人把手机放进衣袋后的位置偏差相同,这样只要测出在起点的位置偏差,再结合在每一步的推断点上测到的手机方向角,二者相加即为人走每一步时的行走方向[2]。
4.2 融合照相机
天花板的直线边缘可以作为参考来推算行人方向。Sun Z等人[7]先是利用计算机视觉技术从手机拍到的照片中提取出天花板边缘,再计算手机Y轴相对天花板边缘的方向偏差。由于建筑物水平界面大多是长方形的,所以天花板边缘相对建筑物水平或垂直,这时再测量建筑物的绝对方向,相当于天花板边缘的绝对方向,再结合前面手机相对天花板边缘的方向偏差,就能得到手机的方向。该方案能取得1°左右的精度,缺点是计算量巨大,耗能也很大。
表3列举总结了一些基于手机的行人方向推算文献。
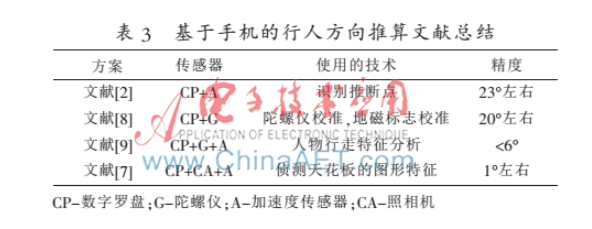
从表3看出,大多数方案都是把几种传感器融合在一起,这样可以部分抵消单独使用数字罗盘测量方向时受到的地磁偏差和位置偏差影响。
5 开放性研究问题
在行人航位推算应用于室内定位的过程中,依旧存在着一些研究问题。
5.1 不同方案系统的融合
将几种定位技术结合起来使用可以有效提高定位的精度、可靠性,同时能节省能耗成本。而且,能根据人所在的环境以及定位需求的不同选择最合适的定位技术,从而实现无缝切换。比如WiFi指纹定位和行人航位推算相结合的定位[10]。
5.2 利用外部环境提高精度
除了内部优化步伐探测、步长推算和方向推算算法,还可以借助外部环境提高定位精度,例如借助地标。在某个位置的手机传感器读数若有明显的特征,则认为该位置是一个地标。比如人乘坐电梯时手机的加速度传感器读数会有明显的特征,可以把电梯位置作为地标[11]。
6 结束语
行人航位推算系统(PDR)不需要在室内预装信标节点就能实现室内定位,跟踪行人轨迹。本文回顾了PDR系统中三个模块:步伐检测、步长推算、方向推算的各种算法方案,对它们进行了简单介绍和比较。最后列举了一些热门的开放性问题。
参考文献
[1] TIAN Z, ZHANG Y, ZHOU M, et al. Pedestrian dead reckoning for MARG navigation using a smartphone[J]. EURASIP Journal on Advances in Signal Processing, 2014, 2014(1): 1-9.
[2] QIAN J, MA J, YING R, et al. An improved indoor localization method using smartphone inertial sensors[C]. Indoor Positioning and Indoor Navigation (IPIN), 2013 International Conference on. IEEE, 2013: 1-7.
[3] LI F, ZHAO C, DING G, et al. A reliable and accurate indoor localization method using phone inertial sensors[C].Proceedings of the 2012 ACM Conference on Ubiquitous Computing, ACM, 2012: 421-430.
[4] BRAJDIC A, HARLE R. Walk detection and step counting on unconstrained smartphones[C]. Proceedings of the 2013 ACM International Joint Conference on Pervasive and ubiquitous computing, ACM, 2013: 225-234.
[5] CHO D K, MUN M, LEE U, et al. Autogait: a mobile platform that accurately estimates the distance walked[C]. Pervasive Computing and Communications(PerCom), 2010 IEEE International Conference on. IEEE, 2010: 116-124.
[6] RENAUDIN V, SUSI M, LACHAPELLE G. Step length estimation using handheld inertial sensors[J]. Sensors, 2012, 12(7):8507-8525.
[7] SUN Z, PAN S, SU Y C, et al. Headio: zero-configured heading acquisition for indoor mobile devices through multimodal context sensing[C]. Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, ACM, 2013:33-42.
[8] WANG H, SEN S, ELGOHARY A, et al. No need to war-drive: unsupervised indoor localization[C]. Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, ACM, 2012:197-210.
[9] ROY N, WANG H, ROY CHOUDHURY R. I am a smartphone and I can tell my user′s walking direction[C]. Proceedings of the 12th Annual International Conference on Mobile Systems, Applications, and Services, ACM, 2014: 329-342.
[10] XIAO W, NI W, TOH Y K. Integrated Wi-Fi fingerprinting and inertial sensing for indoor positioning[C]. Indoor Positioning and Indoor Navigation (IPIN), 2011 International Conference on. IEEE, 2011: 1-6.
[11] SHEN G, CHEN Z, ZHANG P, et al. Walkie-markie: indoor pathway mapping made easy[C]. Proceedings of the 10th USENIX Conference on Networked Systems Design and Implementation, USENIX Association, 2013: 85-98.
编辑:jq
-
九种室内定位技术概览 室内定位技术的原理和应用场景2023-08-30 23690
-
什么是行人航位推算 (PDR)?2022-11-14 6610
-
室内定位中非视距的识别和抑制算法研究综述2022-07-23 2234
-
室内定位技术谁才能稳居C位2021-11-08 1368
-
基于UWB技术的室内定位方法简述2019-10-25 4213
-
室内定位技术应用2018-12-19 2973
-
常见的室内定位方案2018-11-29 4903
-
室内定位技术的应用2018-11-09 2607
-
室内定位技术总述2018-11-08 3212
-
随室内定位需求的增大,室内定位技术的不断发展应用2018-10-19 3407
-
基于MEMS传感器的行人航位推算(PDR)解决方案2018-03-16 14442
-
基于MEMS传感器的行人航位推算解决方案2018-03-15 6331
-
基于MEMS传感器的行人航位推算(PDR)解决方案2016-10-17 6312
-
智能手机室内定位系统面临的挑战2014-05-14 2264
全部0条评论

快来发表一下你的评论吧 !
