

FPGA中如何设计SPI协议驱动?
电子说
描述
SANXIN-B01 Verilog教程-郝旭帅团队
SPI是串行外设接口(Serial Peripheral Interface)的缩写。SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,如今越来越多的芯片集成了这种通信协议。
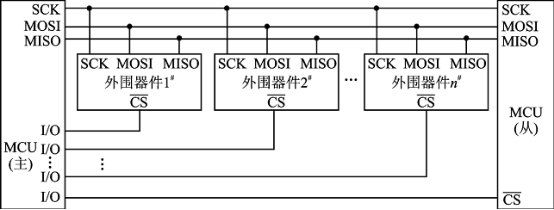
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,中间靠三线或者四线连接(三线时为单向传输或者数据线双向传输)。所有基于SPI的设备共有的,它们是MISO、MOSI、SCLK、CS。
MISO– Master Input Slave Output,主设备数据输入,从设备数据输出。
MOSI– Master Output Slave Input,主设备数据输出,从设备数据输入。
SCLK – Serial Clock,时钟信号,由主设备产生。
CS – Chip Select,从设备使能信号,由主设备控制。
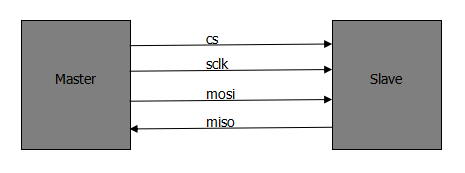
cs是从芯片是否被主芯片选中的控制信号,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),主芯片对此从芯片的操作才有效。这就使在同一条总线上连接多个spi设备成为可能。
通讯是通过数据交换完成的,由sclk提供时钟脉冲,mosi、miso则基于此脉冲完成数据传输。数据输出通过 mosi线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。完成一位数据传输,输入也使用同样原理。因此,至少需要N次时钟信号的改变(上沿和下沿为一次),才能完成N位数据的传输。
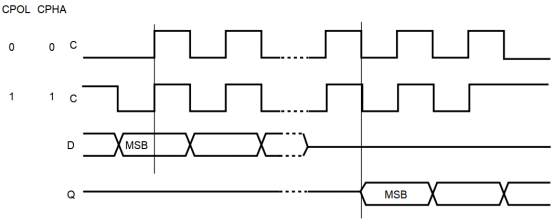
spi通信有四种不同的模式,不同的从设备可能在出厂时就已经配置为某种模式。通信的双方必须是工作在同一模式下,所以我们可以对主设备的spi模式进行配置,通过CPOL(时钟极性)和CPHA(时钟相位)来控制我们主设备的通信模式。
mode0:CPOL=0,CPHA=0;
mode1:CPOL=0,CPHA=1;
mode2:CPOL=1,CPHA=0;
mode3:CPOL=1,CPHA=1;
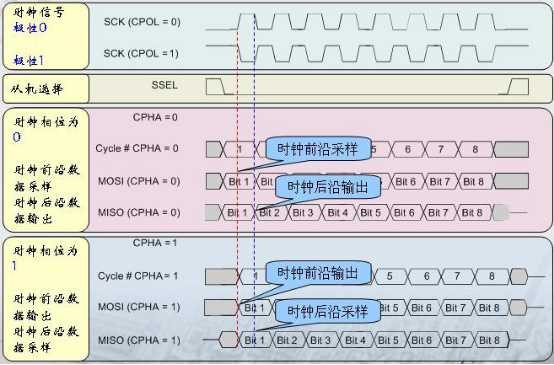
时钟极性CPOL是用来配置SCLK在空闲时,应该处于的状态;时钟相位CPHA用来配置在第几个边沿进行采样。
CPOL=0,表示在空闲状态时,时钟SCLK为低电平。
CPOL=1,表示在空闲状态时,时钟SCLK为高电平。
CPHA=0,表示数据采样是在第1个边沿。
CPHA=1,表示数据采样是在第2个边沿。
即:
CPOL=0,CPHA=0:此时空闲态时,SCLK处于低电平,数据采样是在第1个边沿,也就是SCLK由低电平到高电平的跳变,所以数据采样是在上升沿,数据发送是在下降沿。
CPOL=0,CPHA=1:此时空闲态时,SCLK处于低电平,数据发送是在第1个边沿,也就是SCLK由低电平到高电平的跳变,所以数据采样是在下降沿,数据发送是在上升沿。
CPOL=1,CPHA=0:此时空闲态时,SCLK处于高电平,数据采集是在第1个边沿,也就是SCLK由高电平到低电平的跳变,所以数据采集是在下降沿,数据发送是在上升沿。
CPOL=1,CPHA=1:此时空闲态时,SCLK处于高电平,数据发送是在第1个边沿,也就是SCLK由高电平到低电平的跳变,所以数据采集是在上升沿,数据发送是在下降沿。
硬件简介
FLASH闪存 的英文名称是“Flash Memory”,一般简称为“Flash”,它属于内存器件的一种,是一种非易失性( Non-Volatile )内存。
在开发板上有一块flash(M25P16),用来保存FPGA的硬件配置信息,也可以用来存储用户的应用程序或数据。
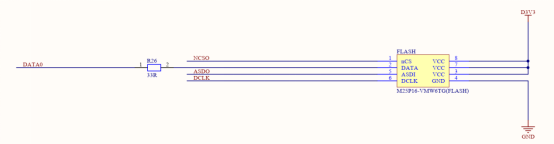
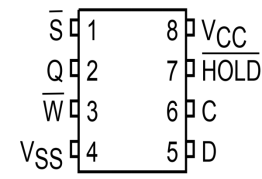
M25P16是一款带有写保护机制和高速SPI总线访问的2M字节串行Flash存储器,该存储器主要特点:2M字节的存储空间,分32个扇区,每个扇区256页,每页256字节;能单个扇区擦除和整片擦除;每扇区擦写次数保证10万次、数据保存期限至少20年。
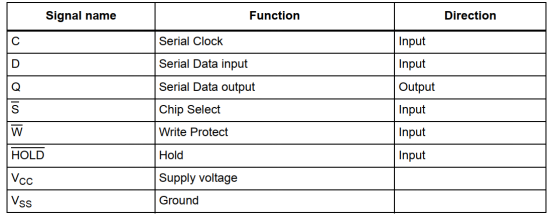
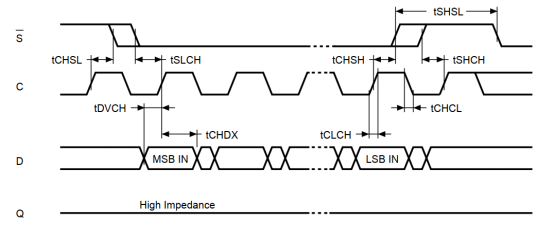
C(serial clock:串行时钟)为D和Q提供了数据输入或者输出的时序。D的数据总是在C的上升沿被采样。Q的数据 在C的下降沿被输出。
 (Chip Select:芯片选择端),当输入为低时,该芯片被选中,可以允许进行读写操作。当输入为高时,该芯片被释放,不能够进行操作。
(Chip Select:芯片选择端),当输入为低时,该芯片被选中,可以允许进行读写操作。当输入为高时,该芯片被释放,不能够进行操作。
对于H——o——l——d——和W——, 为保持功能和硬件写保护功能,在本设计中不使用此管脚,在硬件设计时,这两个管脚全部被拉高了,即全部失效。
flash采用spi的通信协议,flash当做从机。serial clcok等效于spi中的sclk,chip select等效于spi中的cs,D等效于spi中的mosi,Q等效于spi中的miso。
flash可以支持mode0和mode3,这两种模式中,都是在时钟的上升沿采样,在时钟的下降沿发送数据。
flash的每一页都可以被写入,但是写入只能是把1改变为0。擦除可以把0改变为1。所以在正常写入数据之前,都要将flash进行擦除。
flash的命令表如下:
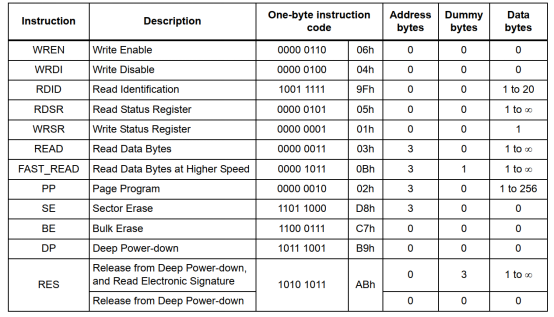
下面介绍几个常用的命令。
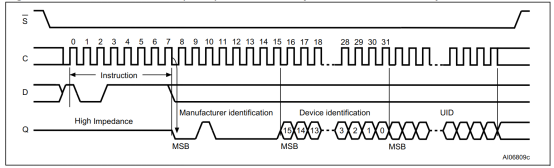
RDID(Read Identification :读ID):发送命令RDID(9F),然后接收第1个字节的memory type(20H),第二个字节的memory capacity(15H)。后续的字节暂不关心。
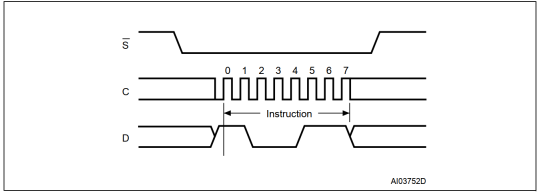
WREN(Write Enable :写使能):在任何写或者擦除的命令之前,都必须首先打开写使能。打开写使能为发送命令WREN(06h)。
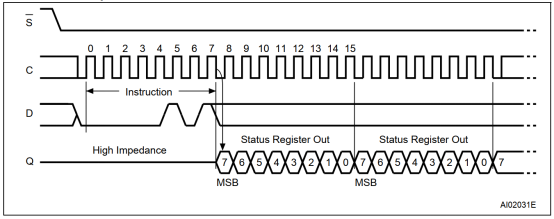
RDSR(Read Status Register:读状态寄存器):发送命令RDSR(05h),然后返回一个字节的状态值。
状态寄存器的格式如下:
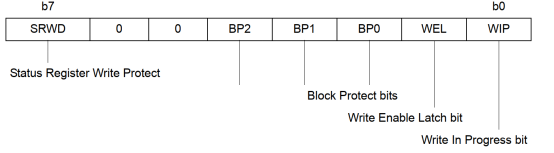
WIP(Write In Progress bit)表示flash内部是否正在进行内部操作,写和擦除都会导致flash内部进行一段时间的工作,在内部工作期间,外部的命令会被忽略,所以在进行任何命令之前,都需要查看flash内部是否正在工作。WIP为1时,表示flash内部正在工作;WIP为0时,表示flash内部没有在工作。
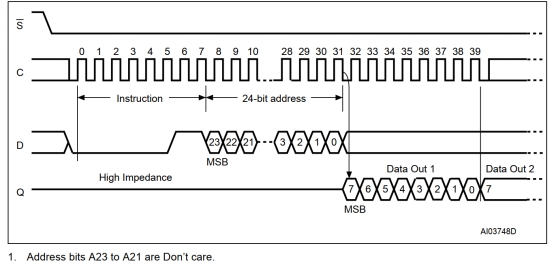
READ(Read DATA Bytes:读数据):发送命令READ(03H),后续发送3个字节的地址,然后就可以接收数据,内部的地址会不断递增。一个读命令就可以把整个flash全部读完。
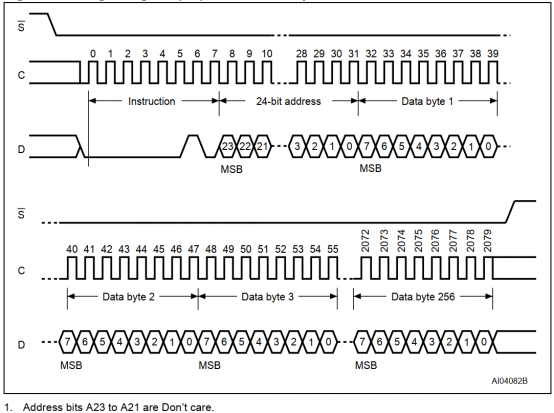
PP(Page Program :页编写):发送命令PP(02H),接着发送3个字节的地址,然后发送数据即可。切记所写的数据不能超过本页的地址范围。
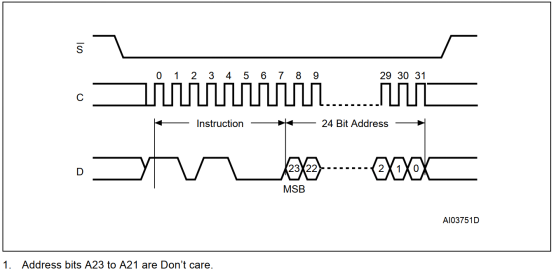
SE(Sector Erase :扇区擦除):发送命令SE(D8H),接着发送3个字节的地址。
BE(Bulk Erase:整片擦除):发送命令BE(C7H)。
关于flash的其他的介绍,可以参考03_芯片手册-》FLASH-》M25P16.pdf。
设计要求
设计flash(M25P16)控制器。
设计分析
根据M25P16的数据手册得知,其接口为spi接口,且支持模式0和模式3,本设计中选择模式0。
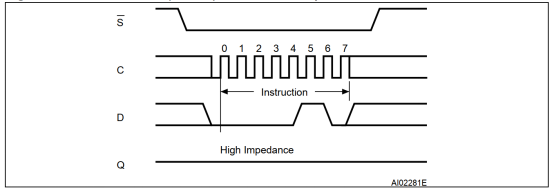
输入时序图如下:
输出时序如下:
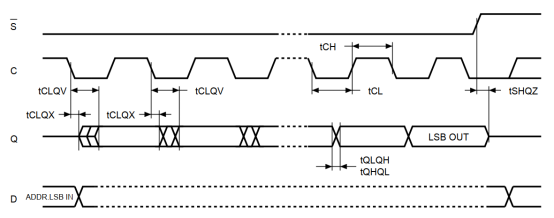
时序图中所对应的符号说明:
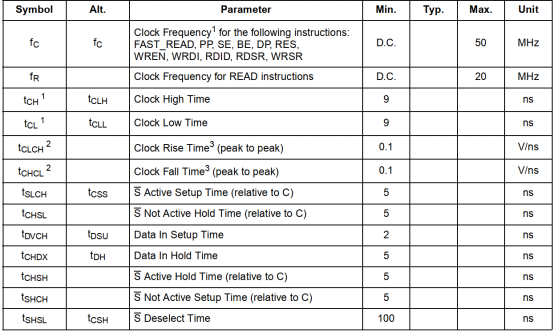
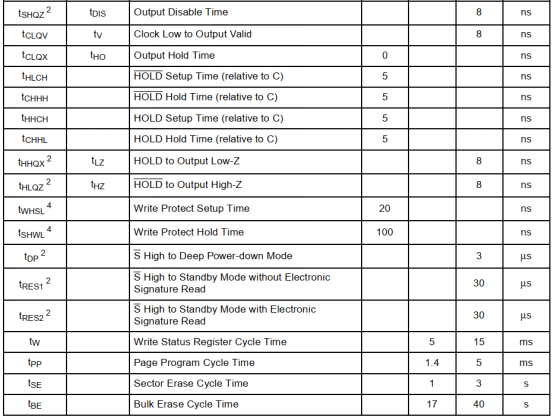
根据输入和输出的时序图以及参数表,将SPI的时钟的频率定为10MHz。
在设计中,FPGA作为主机,M25P16作为从机。
架构设计和信号说明
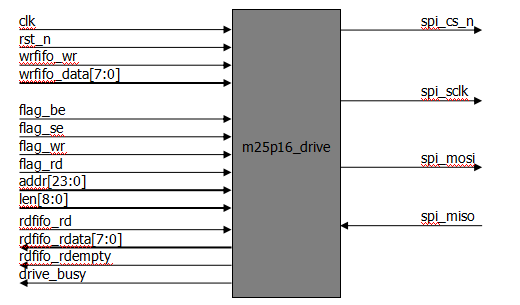
此模块命名为m25p16_drive。
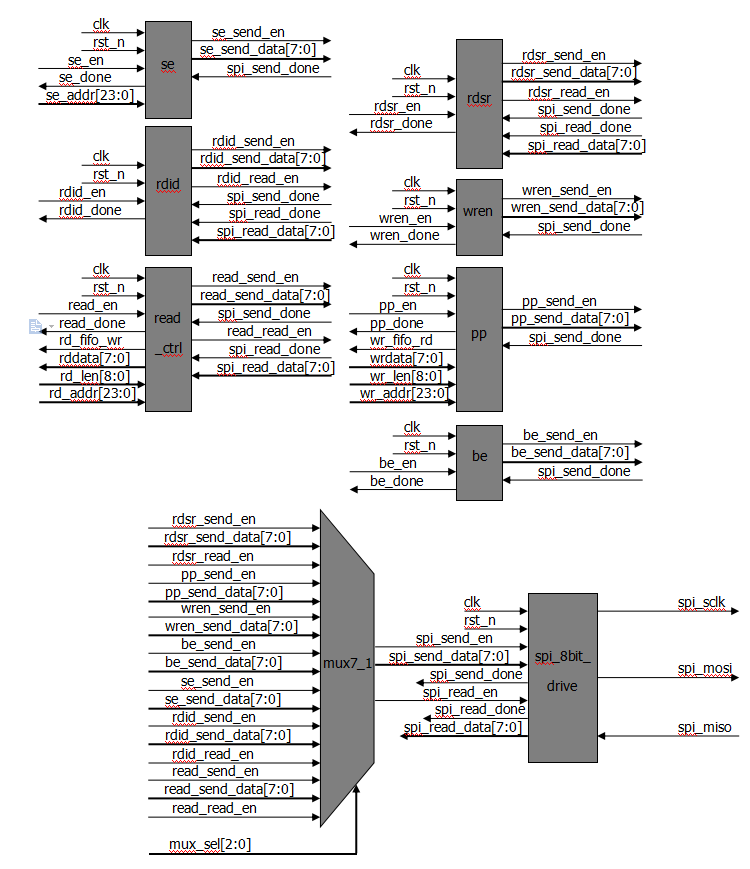
二级模块(分模块)(第一页)
二级模块(分模块)(第二页)
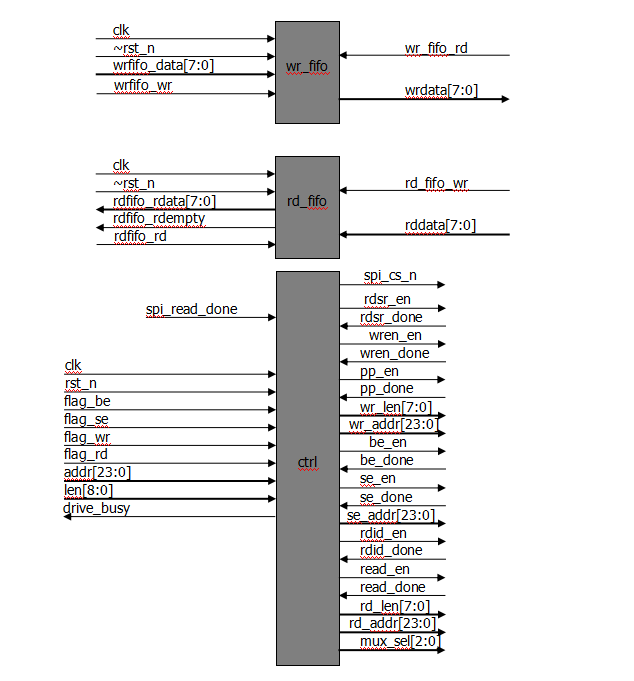
设计中,各个命令单独写出控制器,通过多路选择器选择出对应的命令,然后控制spi_8bit_drive将数据按照spi的协议发送出去。各个命令的脉冲通过ctrl模块进行控制各个命令控制器,写入的数据首先写入到写缓冲区,读出的数据读出后写入到读缓冲区。
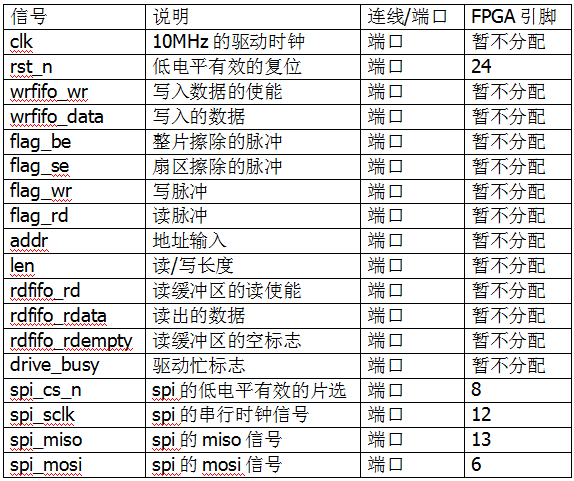
暂不分配的端口,在应用时都是由上游模块进行控制,本设计测试时,编写上游模块进行测试。
各个模块的功能,和连接线的功能在各个模块设计中说明。
spi_8bit_drive设计实现
本模块负责将8bit的并行数据按照spi协议发送出去,以及负责按照spi协议接收数据,将接收的数据(8bit)并行传输给各个模块。
spi_send_en为发送数据使能信号(脉冲信号),spi_send_data为所要发送数据,spi_send_done为发送完成信号(脉冲信号)。
spi_read_en为接收数据使能信号(脉冲信号),spi_read_data为所接收的数据,spi_read_done为接收完成信号(脉冲信号)。
在发送逻辑控制中,全部的信号采用下降沿驱动。利用外部给予的spi_send_en作为启动信号,启动send_cnt。send_cnt在不发送数据时为8,发送数据时,从0到7。
在接收逻辑中,全部的信号采用上升沿驱动。利用外部给予的spi_read_en作为启动信号,启动rec_en,经过移位接收数据。
在spi_sclk输出时,采用组合逻辑。由于设计采用spi的模式0,故而spi_sclk不发送或者接收数据时为0,接收数据时为时钟信号。因为要求为模式0,所以在接收数据时,spi_sclk的输出不能够先有下降沿,即要求spi_sclk的控制信号不能由上升沿信号驱动,所以将rec_en同步到下降沿的rec_en_n。
仿真代码为:
`timescale 1ns/1ps
module spi_8bit_drive_tb;
reg clk; reg rst_n; reg spi_send_en; reg [7:0] spi_send_data; wire spi_send_done; reg spi_read_en; wire [7:0] spi_read_data; wire spi_read_done; wire spi_sclk; wire spi_mosi; reg spi_miso;
spi_8bit_drive spi_8bit_drive_inst(
.clk (clk), .rst_n (rst_n), .spi_send_en (spi_send_en), .spi_send_data (spi_send_data), .spi_send_done (spi_send_done), .spi_read_en (spi_read_en), .spi_read_data (spi_read_data), .spi_read_done (spi_read_done), .spi_sclk (spi_sclk), .spi_mosi (spi_mosi), .spi_miso (spi_miso) ); initial clk = 1‘b0; always # 50 clk = ~clk; initial begin rst_n = 1’b0; spi_send_en = 1‘b0; spi_send_data = 8’d0; spi_read_en = 1‘b0; spi_miso = 1’b0; # 201 rst_n = 1‘b1; # 200 @ (posedge clk); # 2; spi_send_en = 1’b1; spi_send_data = {$random} % 256; @ (posedge clk); # 2; spi_send_en = 1‘b0; spi_send_data = 8’d0; @ (posedge spi_send_done); # 2000 @ (posedge clk); # 2; spi_read_en = 1‘b1; @ (posedge clk); # 2; spi_read_en = 1’b0; @ (posedge spi_read_done); # 200 $stop; end always @ (negedge clk) spi_miso 《= {$random} % 2;
endmodule
在仿真中,将时钟设置为10MHz。
所有的信号采用上升沿驱动。发送一个8bit的随机数值,接收一个8bit的随机数值。
spi_miso信号为从机下降沿驱动信号。
通过RTL仿真,可以看出发送和接收全部正常。
mux7_1设计实现
本模块负责将7个命令模块发出的命令(写使能、写数据和读使能)经过选择发送给spi_8bit_drive模块。
module mux7_1 (
input wire rdsr_send_en, input wire [7:0] rdsr_send_data, input wire rdsr_read_en, input wire pp_send_en, input wire [7:0] pp_send_data, input wire wren_send_en, input wire [7:0] wren_send_data, input wire be_send_en, input wire [7:0] be_send_data, input wire se_send_en, input wire [7:0] se_send_data, input wire rdid_send_en, input wire [7:0] rdid_send_data, input wire rdid_read_en, input wire read_send_en, input wire [7:0] read_send_data, input wire read_read_en, input wire [2:0] mux_sel, output reg spi_send_en, output reg [7:0] spi_send_data, output reg spi_read_en);
always @ * begin case (mux_sel) 3‘d0 : begin spi_send_en = rdsr_send_en; spi_send_data = rdsr_send_data; spi_read_en = rdsr_read_en; end 3’d1 : begin spi_send_en = pp_send_en; spi_send_data = pp_send_data; spi_read_en = 1‘b0; end 3’d2 : begin spi_send_en = wren_send_en; spi_send_data = wren_send_data; spi_read_en = 1‘b0; end 3’d3 : begin spi_send_en = be_send_en; spi_send_data = be_send_data; spi_read_en = 1‘b0; end 3’d4 : begin spi_send_en = se_send_en; spi_send_data = se_send_data; spi_read_en = 1‘b0; end 3’d5 : begin spi_send_en = rdid_send_en; spi_send_data = rdid_send_data; spi_read_en = rdid_read_en; end 3‘d6 : begin spi_send_en = read_send_en; spi_send_data = read_send_data; spi_read_en = read_read_en; end default : begin spi_send_en = 1’b0; spi_send_data = 8‘d0; spi_read_en = 1’b0; end endcase end
endmodule
在设计中,有的命令模块不需要进行读取(pp和se等等),此时将输出的读使能信号输出为低电平。
be设计实现
该模块接收到be_en(整片擦除的脉冲信号)信号后,发送对应的使能和数据,等待发送完成脉冲。发送完成后,输出擦除完成的脉冲。
module be (
input wire clk, input wire rst_n, input wire be_en, output reg be_done, output reg be_send_en, output wire [7:0] be_send_data, input wire spi_send_done);
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) be_send_en 《= 1’b0; else be_send_en 《= be_en; end assign be_send_data = 8‘hc7;
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) be_done 《= 1‘b0; else be_done 《= spi_send_done; end endmodule
整片擦除的命令为8’hc7。
wren设计实现
该模块接收到wren_en(打开flash内部的写使能的脉冲信号)信号后,发送对应的使能和数据,等待发送完成脉冲。发送完成后,输出擦除完成的脉冲。
module wren (
input wire clk, input wire rst_n, input wire wren_en, output reg wren_done, output reg wren_send_en, output wire [7:0] wren_send_data, input wire spi_send_done);
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) wren_send_en 《= 1‘b0; else wren_send_en 《= wren_en; end assign wren_send_data = 8’h06;
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) wren_done 《= 1’b0; else wren_done 《= spi_send_done; end endmodule
打开flash内部写使能的命令码为8’h06。
se设计实现
该模块接收到se_en(擦除扇区的写使能的脉冲信号)信号后,发送对应的使能和数据,等待发送完成脉冲。发送完成后,接着发送高八位地址,中间八位地址和低八位地址。全部发送完成后,发送se_done信号。
该模块采用状态机实现。SE_STATE(扇区擦除命令发送)、H_ADDR(高八位地址发送)、M_ADDR(中间八位地址发送)、L_ADDR(低八位地址发送)、SE_DONE(扇区擦除完成)。所有的脉冲信号在未标注的时刻,输出全部为0。
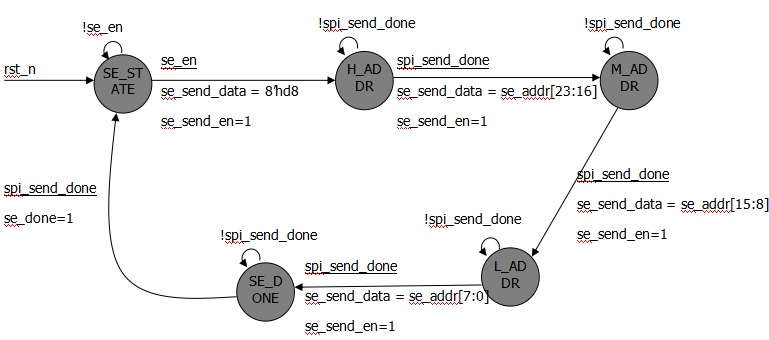
在发送过程中,由于是每8bit发送一次,所以在时序上将看到发送时,每8个脉冲一组,中间会有明显的间隔。
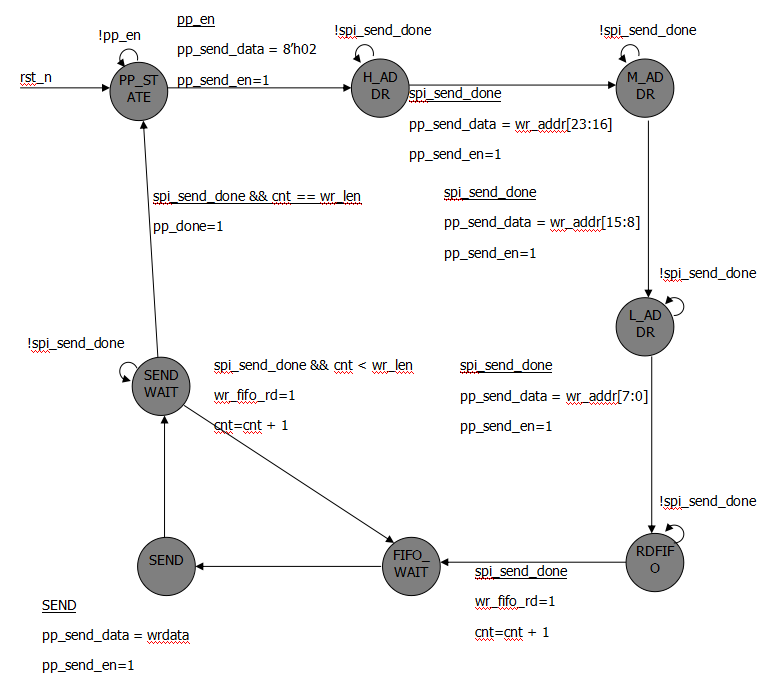
pp设计实现
该模块负责将外部写fifo中的数据写入到flash中。wr_fifo_rd为写fifo的读使能信号,wrdata为从写fifo中读出的数据,wr_len为需要写入flash中数据的长度,wr_addr为写入地址。
该模块采用状态机实现。PP_STATE(发送pp命令),H_ADDR(发送高八位地址)、M_ADDR(发送中间八位地址),L_ADDR(发送低八位地址)、RDFIFO(读写fifo)、FIFO_WAIT(等待读写fifo的数据输出)、SEND(发送8bit数据)、SEND_WAIT(发送等待,发送完成后判断是否发送完成)。对于所有的脉冲信号,没有赋值的位置,全部赋值为0。
cnt为记录已经发送的数据个数。
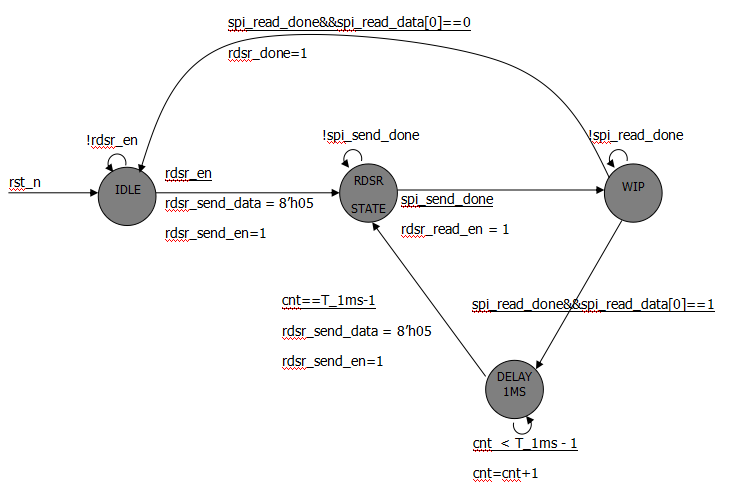
rdsr设计实现
本模块的功能为读取m25p16的状态寄存器,主要检测状态寄存器的最低位(WIP)。
WIP(write in progress :正在进行写进程),该bie位表示了flash内部是否在进行写进程。如果处于写进程时,flash忽略外部所有的命令,所以建议在执行任何命令前,首先进行检测该位。1表示正在写进程中,0表示不处于写进程。
如果检测到正在写进程中,进行延迟1ms,然后再次读取该位状态。直到写进程结束。
本模块采用状态机设计实现。ILDE(发送读状态寄存器命令)、RDSRSTATE(发送读使能)、WIP(判断wip位)、 DELAY1ms(延迟1ms)。cnt为延迟1ms的计数器。
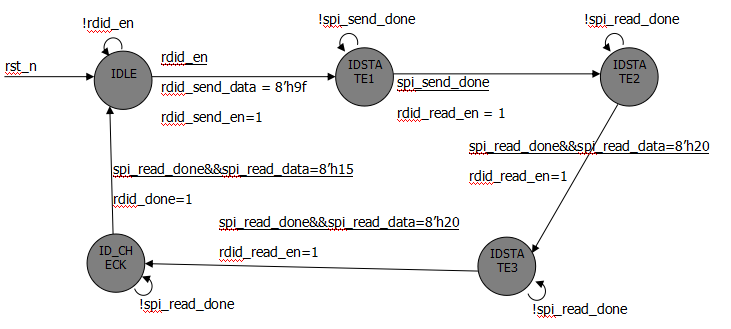
rdid设计实现
该模块负责读取flash的ID(2015),验证ID的正确性。
该模块采用状态机的方式实现。IDLE(等待读取ID的命令)、IDSTATE1(读取高八位ID)、IDSTATE2(读取中间八位ID)、IDSTATE3(读取低八位ID)、ID_CHECK(检测ID的正确性)。
状态转移图如下:
设计代码为:
module rdid (
input wire clk, input wire rst_n, input wire rdid_en, output reg rdid_done, output reg rdid_send_en, output reg [7:0] rdid_send_data, input wire spi_send_done, output reg rdid_read_en, input wire spi_read_done, input wire [7:0] spi_read_data);
localparam IDLE = 5’b00001; localparam IDSTATE1 = 5‘b00010; localparam IDSTATE2 = 5’b00100; localparam IDSTATE3 = 5‘b01000; localparam ID_CHECK = 5’b10000; reg [4:0] c_state; reg [4:0] n_state; always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) c_state 《= IDLE; else c_state 《= n_state; end always @ * begin case (c_state) IDLE : begin if (rdid_en == 1’b1) n_state = IDSTATE1; else n_state = IDLE; end IDSTATE1 : begin if (spi_send_done == 1‘b1) n_state = IDSTATE2; else n_state = IDSTATE1; end IDSTATE2 : begin if (spi_read_done == 1’b1 && spi_read_data == 8‘h20) n_state = IDSTATE3; else n_state = IDSTATE2; end IDSTATE3 : begin if (spi_read_done == 1’b1 && spi_read_data == 8‘h20) n_state = ID_CHECK; else n_state = IDSTATE3; end ID_CHECK : begin if (spi_read_done == 1’b1 && spi_read_data == 8‘h15) n_state = IDLE; else n_state = ID_CHECK; end default : n_state = IDLE; endcase end
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) rdid_send_data 《= 8‘d0; else if (c_state == IDLE && rdid_en == 1’b1) rdid_send_data 《= 8‘h9f; else rdid_send_data 《= 8’d0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) rdid_send_en 《= 1’b0; else if (c_state == IDLE && rdid_en == 1‘b1) rdid_send_en 《= 1’b1; else rdid_send_en 《= 1‘b0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) rdid_read_en 《= 1‘b0; else if ((c_state == IDSTATE1 && spi_send_done == 1’b1) || (c_state == IDSTATE2 && spi_read_done == 1‘b1 && spi_read_data == 8’h20) || (c_state == IDSTATE3 && spi_read_done == 1‘b1 && spi_read_data == 8’h20)) rdid_read_en 《= 1‘b1; else rdid_read_en 《= 1’b0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) rdid_done 《= 1’b0; else if (c_state == ID_CHECK && spi_read_done == 1‘b1 && spi_read_data == 8’h15) rdid_done 《= 1‘b1; else rdid_done 《= 1’b0; end endmodule
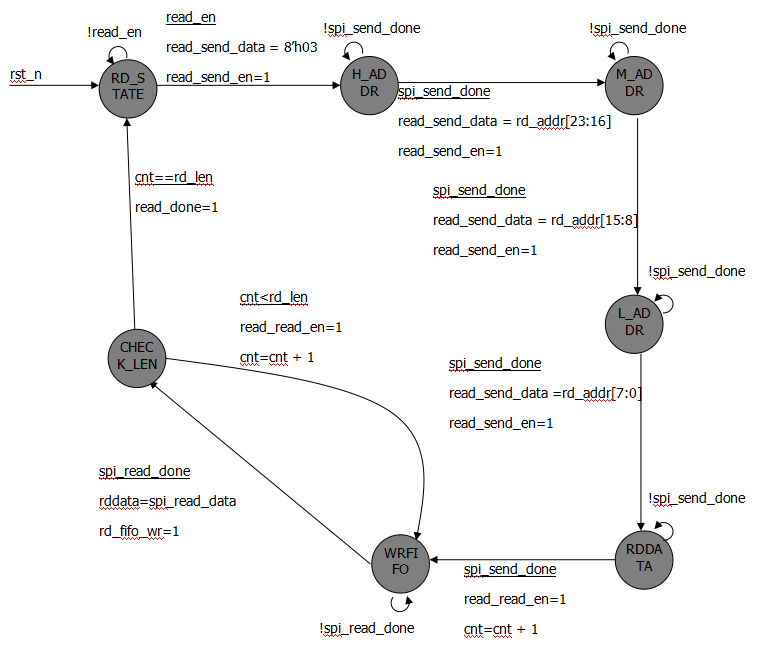
read_ctrl设计实现
该模块负责将flash的数据读出,写入到输出缓存中。
该模块采用状态机实现。RD_STATE(等待读命令)、H_ADDR(发送高八位地址)、M_ADDR(发送中间八位地址)、L_ADDR(发送低八位地址)、RDDATA(读取数据)、WRFIFO(将读出的数据写入到FIFO中)、CHECK_LEN(判断读取的长度)。
状态转移图如下:
wr_fifo和rd_fifo调用
两个fifo的宽度设置为8,深度设置为256,同步fifo,带有复位。
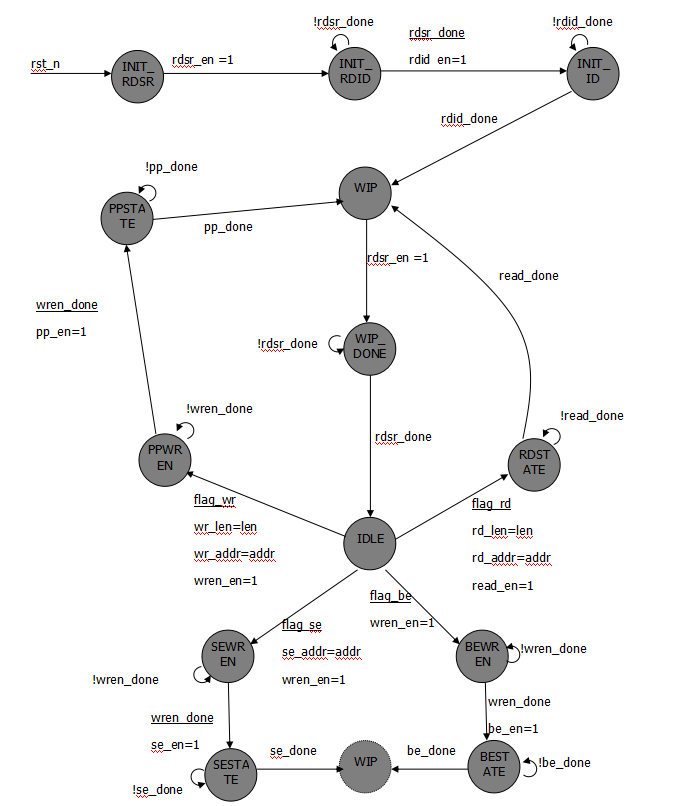
ctrl设计实现
该模块根据外部的命令,按照m25p16的执行规则,进行控制各个模块的执行。
该模块采用状态机实现。INIT_RDSR(读WIP),INIT_RDID(读ID),INIT_ID(判断ID),WIP(读WIP),WIP_DONE(等待WIP),IDLE(空闲状态),**STATE(执行对应的命令),**WREN(打开flash的写使能)。在进行任何命令前,都检查wip。
状态转移图如下:
在不同的状态,mux_sel选择对应的命令通过。
drive_busy只有在IDLE状态才是低电平。
spi_cs_n信号, DLE状态为高电平、WIP_DONE(INIT_RDID)中spi_read_done信号为高时 (保证能够多次读取状态寄存器)、在其他状态发生切换时,spi_cs_n 为高电平,否则为低电平。
m25p16_drive设计实现
本模块负责连接所有二级模块,实现所有的功能。
module m25p16_drive (
input wire clk, input wire rst_n, input wire wrfifo_wr, input wire [7:0] wrfifo_data, input wire flag_be, input wire flag_se, input wire flag_wr, input wire flag_rd, input wire [23:0] addr, input wire [8:0] len, input wire rdfifo_rd, output wire [7:0] rdfifo_rdata, output wire rdfifo_rdempty, output wire drive_busy, output wire spi_cs_n, output wire spi_sclk, output wire spi_mosi, input wire spi_miso);
wire spi_send_en; wire [7:0] spi_send_data; wire spi_send_done; wire spi_read_en; wire [7:0] spi_read_data; wire spi_read_done; wire rdsr_send_en; wire [7:0] rdsr_send_data; wire rdsr_read_en; wire pp_send_en; wire [7:0] pp_send_data; wire wren_send_en; wire [7:0] wren_send_data; wire be_send_en; wire [7:0] be_send_data; wire se_send_en; wire [7:0] se_send_data; wire rdid_send_en; wire [7:0] rdid_send_data; wire rdid_read_en; wire read_send_en; wire [7:0] read_send_data; wire read_read_en; wire [2:0] mux_sel; wire be_en; wire be_done; wire wren_en; wire wren_done; wire se_en; wire [23:0] se_addr; wire se_done; wire pp_en; wire pp_done; wire wr_fifo_rd; wire [7:0] wrdata; wire [8:0] wr_len; wire [23:0] wr_addr; wire rdsr_en; wire rdsr_done; wire rdid_en; wire rdid_done; wire read_en; wire [23:0] rd_addr; wire [8:0] rd_len; wire [7:0] rddata; wire rd_fifo_wr; wire read_done; ctrl ctrl_inst(
.clk (clk), .rst_n (rst_n), .flag_be (flag_be), .flag_se (flag_se), .flag_wr (flag_wr), .flag_rd (flag_rd), .addr (addr), .len (len), .drive_busy (drive_busy), .spi_cs_n (spi_cs_n), .spi_read_done (spi_read_done), .rdsr_en (rdsr_en), .rdsr_done (rdsr_done), .wren_en (wren_en), .wren_done (wren_done), .pp_en (pp_en), .wr_addr (wr_addr), .wr_len (wr_len), .pp_done (pp_done), .be_en (be_en), .be_done (be_done), .se_en (se_en), .se_addr (se_addr), .se_done (se_done), .rdid_en (rdid_en), .rdid_done (rdid_done), .read_en (read_en), .rd_addr (rd_addr), .rd_len (rd_len), .read_done (read_done), .mux_sel (mux_sel) ); rd_fifo rd_fifo_inst ( .aclr ( ~rst_n ), .clock ( clk ), .data ( rddata ), .rdreq ( rdfifo_rd ), .wrreq ( rd_fifo_wr ), .empty ( rdfifo_rdempty ), .q ( rdfifo_rdata ) ); wr_fifo wr_fifo_inst ( .aclr ( ~rst_n ), .clock ( clk ), .data ( wrfifo_data ), .rdreq ( wr_fifo_rd ), .wrreq ( wrfifo_wr ), .q ( wrdata ) ); read_ctrl read_ctrl_inst(
.clk (clk), .rst_n (rst_n), .read_en (read_en), .rd_addr (rd_addr), .rd_len (rd_len), .rddata (rddata), .rd_fifo_wr (rd_fifo_wr), .read_done (read_done), .read_send_en (read_send_en), .read_send_data (read_send_data), .spi_send_done (spi_send_done), .read_read_en (read_read_en), .spi_read_done (spi_read_done), .spi_read_data (spi_read_data) );
rdid rdid_inst(
.clk (clk), .rst_n (rst_n), .rdid_en (rdid_en), .rdid_done (rdid_done), .rdid_send_en (rdid_send_en), .rdid_send_data (rdid_send_data), .spi_send_done (spi_send_done), .rdid_read_en (rdid_read_en), .spi_read_done (spi_read_done), .spi_read_data (spi_read_data) ); rdsr rdsr_inst(
.clk (clk), .rst_n (rst_n), .rdsr_en (rdsr_en), .rdsr_done (rdsr_done), .rdsr_send_en (rdsr_send_en), .rdsr_send_data (rdsr_send_data), .spi_send_done (spi_send_done), .rdsr_read_en (rdsr_read_en), .spi_read_data (spi_read_data), .spi_read_done (spi_read_done) ); pp pp_inst(
.clk (clk), .rst_n (rst_n), .pp_en (pp_en), .pp_done (pp_done), .wr_fifo_rd (wr_fifo_rd), .wrdata (wrdata), .wr_len (wr_len), .wr_addr (wr_addr), .pp_send_en (pp_send_en), .pp_send_data (pp_send_data), .spi_send_done (spi_send_done) ); se se_inst(
.clk (clk), .rst_n (rst_n), .se_en (se_en), .se_addr (se_addr), .se_done (se_done), .se_send_en (se_send_en), .se_send_data (se_send_data), .spi_send_done (spi_send_done) ); wren wren_inst(
.clk (clk), .rst_n (rst_n), .wren_en (wren_en), .wren_done (wren_done), .wren_send_en (wren_send_en), .wren_send_data (wren_send_data), .spi_send_done (spi_send_done) );
be be_inst(
.clk (clk), .rst_n (rst_n), .be_en (be_en), .be_done (be_done), .be_send_en (be_send_en), .be_send_data (be_send_data), .spi_send_done (spi_send_done) ); mux7_1 mux7_1_inst(
.rdsr_send_en (rdsr_send_en), .rdsr_send_data (rdsr_send_data), .rdsr_read_en (rdsr_read_en), .pp_send_en (pp_send_en), .pp_send_data (pp_send_data), .wren_send_en (wren_send_en), .wren_send_data (wren_send_data), .be_send_en (be_send_en), .be_send_data (be_send_data), .se_send_en (se_send_en), .se_send_data (se_send_data), .rdid_send_en (rdid_send_en), .rdid_send_data (rdid_send_data), .rdid_read_en (rdid_read_en), .read_send_en (read_send_en), .read_send_data (read_send_data), .read_read_en (read_read_en), .mux_sel (mux_sel), .spi_send_en (spi_send_en), .spi_send_data (spi_send_data), .spi_read_en (spi_read_en) ); spi_8bit_drive spi_8bit_drive_inst(
.clk (clk), .rst_n (rst_n), .spi_send_en (spi_send_en), .spi_send_data (spi_send_data), .spi_send_done (spi_send_done), .spi_read_en (spi_read_en), .spi_read_data (spi_read_data), .spi_read_done (spi_read_done), .spi_sclk (spi_sclk), .spi_mosi (spi_mosi), .spi_miso (spi_miso) ); endmodule
RTL仿真
本次设计涉及到读取flash的id以及状态寄存器,所以在仿真时需要加入仿真模型。仿真模型放在msim的m25p16_sim_module中。m25p16为仿真模型的顶层文件。
由于读写和擦除的时间较长,RTL仿真中,将只仿真RDSR和RDID,其他的功能测试在板级测试时进行。
仿真代码如下:
`timescale 1ns/1ps
module m25p16_drive_tb;
reg clk; reg rst_n; wire drive_busy; wire spi_cs_n; wire spi_sclk; wire spi_mosi; wire spi_miso;
m25p16_drive m25p16_drive_inst(
.clk (clk), .rst_n (rst_n), .wrfifo_wr (1’b0), .wrfifo_data (8‘d0), .flag_be (1’b0), .flag_se (1‘b0), .flag_wr (1’b0), .flag_rd (1‘b0), .addr (24’d0), .len (9‘d0), .rdfifo_rd (1’b0), .rdfifo_rdata (), .rdfifo_rdempty (), .drive_busy (drive_busy), .spi_cs_n (spi_cs_n), .spi_sclk (spi_sclk), .spi_mosi (spi_mosi), .spi_miso (spi_miso) );
m25p16 m25p16_inst( .c (spi_sclk), .data_in (spi_mosi), .s (spi_cs_n), .w (1‘b1), .hold (1’b1), .data_out (spi_miso) );
initial clk = 1‘b0; always # 50 clk = ~clk; initial begin rst_n = 1’b0; # 201 rst_n = 1‘b1; @ (negedge drive_busy); # 2000 $stop; end
endmodule
在设置testbench时,注意将所有文件全部添加到文件中。
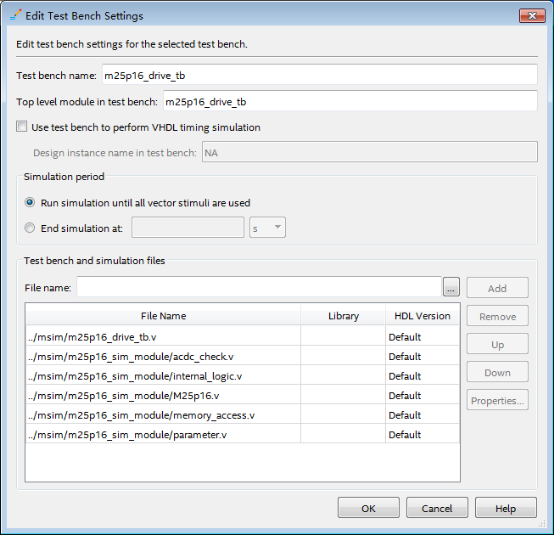
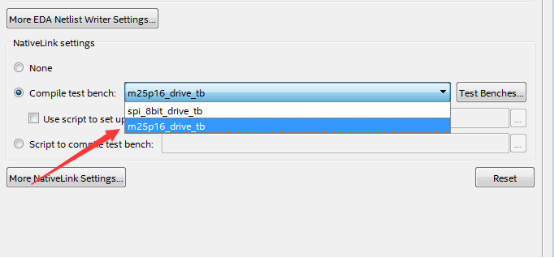
选择testbench时,注意选中设置的m25p16_drive_tb。
利用modelsim仿真,可以得出如下RTL仿真波形。
读到ID,以及检测WIP都是正确的。
板级测试
由于m25p16的时序原因,整个设计工作在10MHz(利用PLL产生)。
在进行测试控制时,对最后一个扇区进行擦除;对最后一个扇区的第一页进行写入数据100个(1至100);对最后一个扇区的第一个进行读取,验证数据是否为1至100。
测试的控制模块命名为test_ctrl。
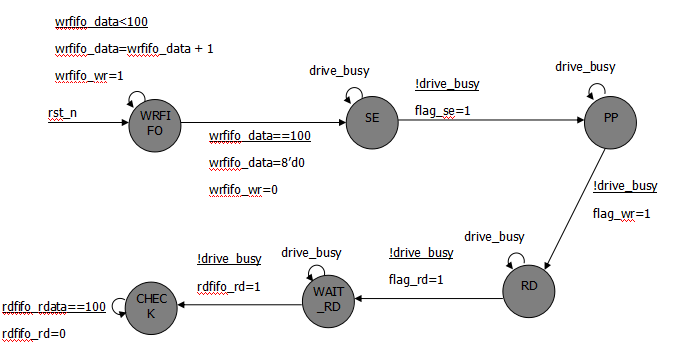
此模块采用状态机实现。WRFIFO(将1至100写入wrfifo中)、SE(扇区擦除)、PP(写入flash)、RD(读出flash)、WAIT_RD(等待读取)、CHECK( 检测读出的数据的正确性)。
设计代码为:
module test_ctrl (
input wire clk, input wire rst_n, output reg wrfifo_wr, output reg [7:0] wrfifo_data, output reg flag_se, output reg flag_wr, output reg flag_rd, input wire drive_busy, output reg rdfifo_rd, input wire [7:0] rdfifo_rdata);
localparam WRFIFO = 6’b000_001; localparam SE = 6‘b000_010; localparam PP = 6’b000_100; localparam RD = 6‘b001_000; localparam WAIT_RD = 6’b010_000; localparam CHECK = 6‘b100_000; reg [5:0] c_state; reg [5:0] n_state; always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) c_state 《= WRFIFO; else c_state 《= n_state; end always @ * begin case (c_state) WRFIFO : begin if (wrfifo_data == 8‘d100) n_state = SE; else n_state = WRFIFO; end SE : begin if (drive_busy == 1’b0) n_state = PP; else n_state = SE; end PP : begin if (drive_busy == 1‘b0) n_state = RD; else n_state = PP; end RD : begin if (drive_busy == 1’b0) n_state = WAIT_RD; else n_state = RD; end WAIT_RD : begin if (drive_busy == 1‘b0) n_state = CHECK; else n_state = WAIT_RD; end
CHECK : begin n_state = CHECK; end
default : n_state = WRFIFO; endcase end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) wrfifo_data 《= 8‘d0; else if (c_state == WRFIFO && wrfifo_data 《 8’d100) wrfifo_data 《= wrfifo_data + 1‘b1; else wrfifo_data 《= 8’d0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) wrfifo_wr 《= 1’d0; else if (c_state == WRFIFO && wrfifo_data 《 8‘d100) wrfifo_wr 《= 1’d1; else wrfifo_wr 《= 1‘d0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) flag_se 《= 1‘b0; else if (c_state == SE && drive_busy == 1’b0) flag_se 《= 1‘b1; else flag_se 《= 1’b0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) flag_wr 《= 1’b0; else if (c_state == PP && drive_busy == 1‘b0) flag_wr 《= 1’b1; else flag_wr 《= 1‘b0; end
always @ (posedge clk, negedge rst_n) begin if (rst_n == 1’b0) flag_rd 《= 1‘b0; else if (c_state == RD && drive_busy == 1’b0) flag_rd 《= 1‘b1; else flag_rd 《= 1’b0; end always @ (posedge clk, negedge rst_n) begin if (rst_n == 1‘b0) rdfifo_rd 《= 1’b0; else if (c_state == WAIT_RD && drive_busy == 1‘b0) rdfifo_rd 《= 1’b1; else if (c_state == CHECK && rdfifo_rdata == 8‘d99) rdfifo_rd 《= 1’b0; else rdfifo_rd 《= rdfifo_rd; end endmodule
将test模块设置为顶层。在test模块中,m25p16_drive例化中,对于整片擦除不做控制,对于addr直接指向最后一个扇区的第一页,len指定为100。
代码为:
module test (
input wire clk, input wire rst_n, output wire spi_cs_n, output wire spi_sclk, output wire spi_mosi, input wire spi_miso);
wire wrfifo_wr; wire [7:0] wrfifo_data; wire flag_rd; wire flag_se; wire flag_wr; wire drive_busy; wire rdfifo_rd; wire [7:0] rdfifo_rdata; wire clk_10m; wire pll_locked; pll_test pll_test_inst ( .areset ( ~rst_n ), .inclk0 ( clk ), .c0 ( clk_10m ), .locked ( pll_locked ) );
test_ctrl test_ctrl_inst(
.clk (clk_10m), .rst_n (pll_locked), .wrfifo_wr (wrfifo_wr), .wrfifo_data (wrfifo_data), .flag_se (flag_se), .flag_wr (flag_wr), .flag_rd (flag_rd), .drive_busy (drive_busy), .rdfifo_rd (rdfifo_rd), .rdfifo_rdata (rdfifo_rdata) ); m25p16_drive m25p16_drive_inst(
.clk (clk_10m), .rst_n (pll_locked), .wrfifo_wr (wrfifo_wr), .wrfifo_data (wrfifo_data), .flag_be (1‘b0), .flag_se (flag_se), .flag_wr (flag_wr), .flag_rd (flag_rd), .addr (24’hff0000), .len (9‘d100), .rdfifo_rd (rdfifo_rd), .rdfifo_rdata (rdfifo_rdata), .rdfifo_rdempty (), .drive_busy (drive_busy), .spi_cs_n (spi_cs_n), .spi_sclk (spi_sclk), .spi_mosi (spi_mosi), .spi_miso (spi_miso) ); endmodule
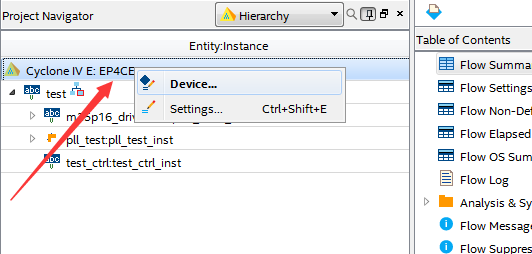
由于开发板上的flash是为FPGA进行保存配置信息的,所以管脚都连接在专用管脚上,本次实验需要将这专用管脚配置为普通io。
右击器件型号,选择device。
点击device and pin options。
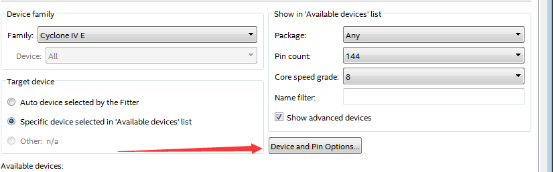
选择Dual-purpose pins,将其中所有的功能改为普通IO。
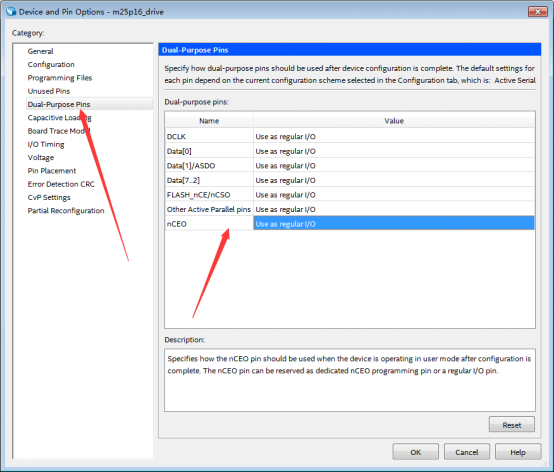
点击ok后,即可进行综合分析。
连接开发板和PC,打开逻辑分析仪。
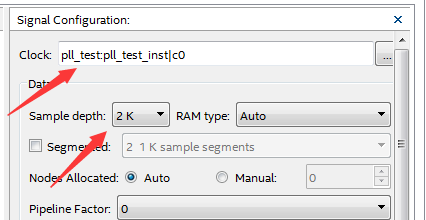
采样时钟选择10MHz(PLL 的c0),采样深度设置为2K。
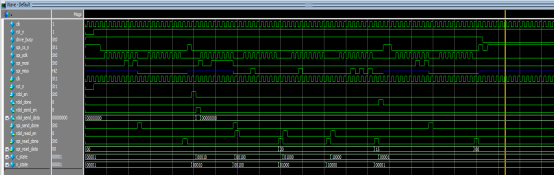
观测信号如下图所示。
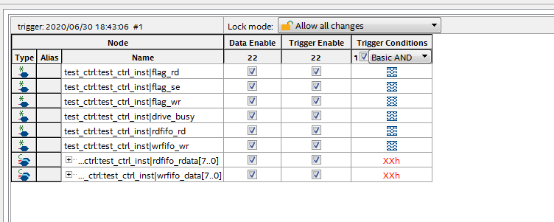
首先将wrfifo_wr的触发条件设置为上升沿。点击触发后,按下复位按键。触发后,可以看到写入数据1至100后,然后进行SE命令。
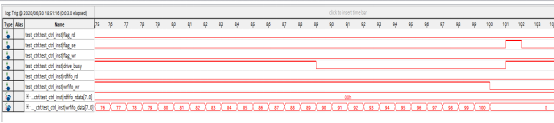
将rdfifo_rd的触发条件设置为上升沿(将wrfifo_wr触发条件修改为donot care)。点击触发后,按下复位按键。

通过仿真和下板实测,验证控制器设计正确。
原文标题:FPGA零基础学习精选 | SPI 协议驱动设计
文章出处:【微信公众号:FPGA技术江湖】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
FPGA实现基于SPI协议的Flash驱动控制芯片擦除2025-12-02 3075
-
FPGA中关于SPI的使用2023-04-12 1766
-
FPGA实现SPI2023-03-20 1076
-
FPGA实现的SPI协议2022-02-17 1154
-
一文看懂SPI协议2022-01-25 880
-
FPGA实现的SPI协议(二)----基于SPI接口的FLASH芯片M25P16的使用2021-12-22 1449
-
基于FPGA来介绍并设计标准的SPI总线协议2021-11-10 1161
-
基于FPGA与MCU通信的SPI协议设计2021-11-05 1205
-
fpga与spi通信协议2014-04-09 2872
-
SPI方式FPGA配置和SPI flash编程2011-05-16 1164
-
PCI总线协议的FPGA实现及驱动设计2010-03-12 659
-
FPGA中SPI复用配置的编程方法2010-01-06 4034
全部0条评论

快来发表一下你的评论吧 !
