

理想与现实的碰撞:当下激光雷达量产的最优解
描述
上海车展在即。
今年,小鹏、蔚来、极狐、R 汽车等多家汽车品牌都将带来搭载激光雷达的自动驾驶量产车型。
自动驾驶这件事上,中国车企这次集体站在了特斯拉的对立面。
特斯拉认为,纯视觉可以实现完全自动驾驶。
今天主流的中国车企,则开始量产带激光雷达的自动驾驶方案。
为什么说激光雷达是 L3 级智能驾驶必备的传感器?
自动驾驶的感知任务就是去实时建立一个准确的 3D 环境模型。
深度学习加单目、三目视觉是无法完成这个任务的。
单目/三目摄像头的致命缺陷就是这类系统必须先识别才能探测得知目标的信息,目标识别(分类)和探测(Detection)是一体无法分割的。
深度学习算法的认知范围来源于数据集的广度和丰富性,而数据集永远是有限的,因此深度学习算法肯定会出现漏检。
如果无法识别目标,系统会认为前方不存在障碍物。特斯拉多次事故大多都是这个原因。
以上,也就是说单目/三目的系统漏检是无法避免的,因此它只能用于 L2 的系统。
L2 以上,则必须要有激光雷达,激光雷达将带来压倒性的安全优势。
某种意义上,激光雷达厂商的角色可以算是系统集成商。
传统激光行业可以提供包括激光发射与接收部分的成熟零组件,行业内这些零组件都有超过 15 年的技术沉淀,像 1550 纳米的激光接收二极管。
激光雷达公司们在激光二极管领域的技术沉淀最多也不会超过 3 年,因此它们的主要工作是设计扫描器。
扫描器也可以采购现成的产品。
如日本 Nidec 的多边形扫描器,Mirrorcle 的 MEMS 振镜。
一定程度上,研发激光雷达产品的门槛没有那么高。
激光雷达厂家要想掌握核心技术,就是自研自产扫描器。
1
理想与现实的碰撞:当下激光雷达量产的最优解
理想的激光雷达技术非 Flash 莫属。
无论从性能、生态、成本、体积、车规来考虑,Flash 激光雷达都是几乎完美的。
但是目前 Flash 激光雷达的瓶颈是性能太差,这主要是 Flash 激光雷达的激光发射端是 VCSEL 阵列。
而 VCSEL 阵列的功率密度远不能和传统的激光二极管比,一旦突破这个瓶颈,Flash 激光雷达即可横扫市场。
但目前来看,Flash 激光雷达要实现量产突破至少还要 5 年时间。
另一个技术路线是硅光电的 FMCW 激光雷达,技术成熟度还低于 Flash,并且即便技术成熟,价格也要比 Flash 激光雷达要高。
FMCW 激光雷达需要昂贵的飞秒级激光发生器,调谐器工作在太赫兹频段,即便大规模量产,成本也要远高于 Flash 激光雷达。
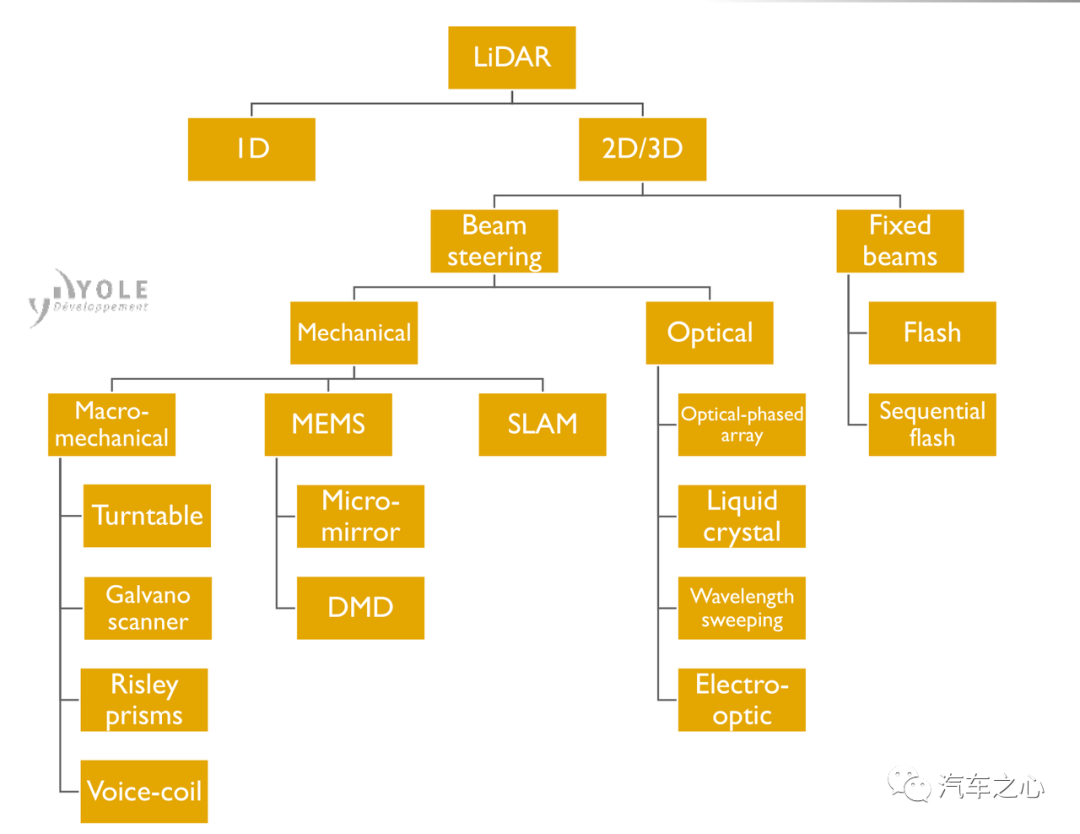
目前激光雷达扫描器可以分为机械式与光学式两大类,机械类再可分为微机械、MEMS 和 SLAM。
SLAM 比较罕见,目前市面主要看到的产品就是微机械和 MEMS。
微机械再可分为四小类,分别是旋转式(包括旋转镜和多边形扫描)、电流计式(Velarray)、多棱镜和音圈式。
MEMS 分为 MEMS 振镜和 DMD 微镜两大类。
MEMS 振镜再可分为压电、电磁、静电、电热四大类。
2
MEMS 路线为什么异军突起?巨大的成本优势
激光雷达的发展方向是朝 Flash 的全固态发展。
法雷奥是目前唯一有量产客户的激光雷达厂家,长距离车规级产品 SCALA 采用转镜式设计,短距离的产品采用 Flash。
然而,法雷奥的下一代长距离的 SCALA 却是 MEMS 激光雷达,这是为何?

法雷奥激光雷达发展路线图
法雷奥是车规级转镜激光雷达鼻祖,也最清楚转镜式激光雷达的缺点,那就是成本下降空间有限。
当下法雷奥在售的 SCALA 第二代转镜式激光雷达,成本恐难低于 400 美元。
这里,我们来分析一下激光雷达的成本结构。
激光雷达成本可以分为 BOM 成本、生产成本和研发成本。

先来看 BOM 成本。
以 Velodyne 的 Puck VLP-16 16 线激光雷达为例, 其零售价为 3800 美元,BOM 成本大约 1000 美元。
这当中主要是激光发射二极管和激光接收二极管,16 线需要 16 个发射,16 个接收。
发射二极管的价格一般是 20-25 美元,典型的如 Excelitas 的 TPGEW1S09H,905 纳米,峰值光功率 70 瓦,输入 12V,峰值电流 30A。
1550 纳米激光二极管价格大约是 905 纳米硅激光二极管价格的 3-5 倍,但其光功率很低,通常用在激光通信领域。
在激光雷达中需要选用到成本更高的 1550 纳米光纤激光器才能达到瓦级光功率,合计大约 580-740 美元。
电机和外壳以及结构件大约 50 美元,电路板大约 100 美元,光学镜头、滤光片和保护罩等光学器件也需要 100 美金以上。
这样的机械旋转式激光雷达合计 BOM 成本大约 830 - 990 美元。
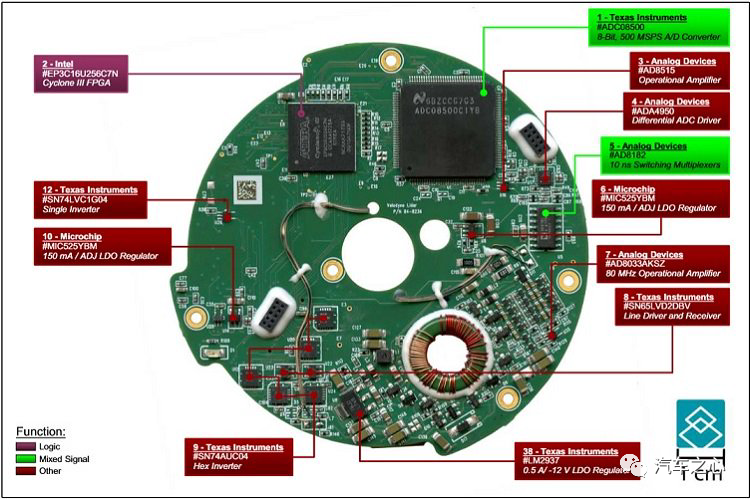
资料来源:techinsights
在主要的元件中,两个芯片比较贵。
一个是德州仪器的 ADC08500,这是个高速 ADC,高达 500MSPS,因此价格比较昂贵,千颗以上采购规模要 30 美元一片,这是德州仪器收购国际半导体所带来的产品线。
另外一个是英特尔收购的 Altera 的 FPGA,型号为 EP3C16U256C7N,价格大约 14美元。
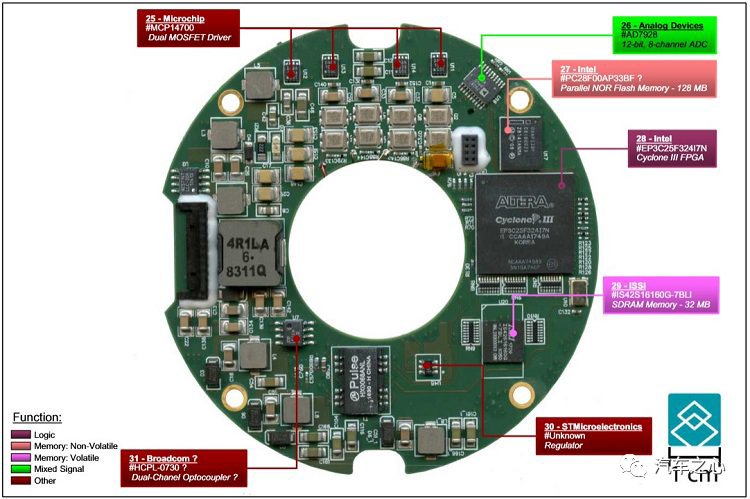
资料来源:techinsights
背面主要是三颗芯片,主数据处理芯片 Altera的FPGA,型号为 EP3C25F324I7,价格大约 22 美元。
还有两片存储器,价格估计只有 5 美元。
还有一些比较贵的高精度晶振,激光雷达是纳秒级产品,时钟精度要求极高。用的元件精度普遍都要很高。
芯片及主动元件大约占 80 美元,被动元件占 15 美元,PCB 大约 5 美元。
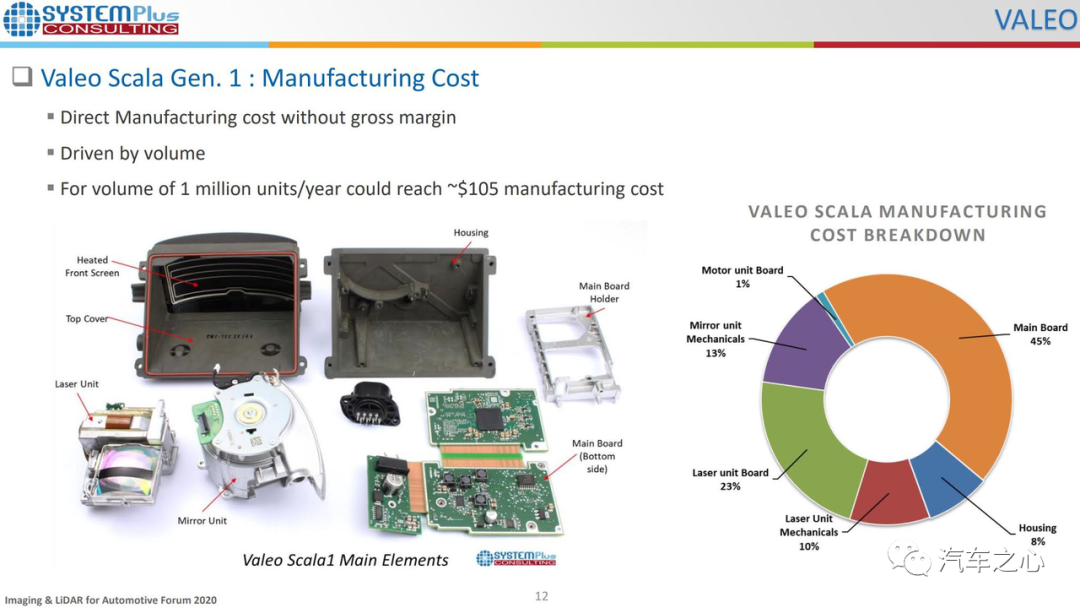
上图是法雷奥的 SCALA 这样的旋转镜激光雷达成本结构,年产量达十万级。
其 BOM 成本大约 300 美元,16 线需要增加 12 套发射与接收,也就是大约 400 美元。
这已经是年产量十万级的规模。
这个价格显然有点高了。
对于 MEMS 激光雷达,发射和接收激光器大幅度减少,即使做到等效上百线,有些只有几个发射,接收可以用单线的 SiPM,也可以用阵列,比较灵活。
BOM 成本大幅度降低,其主要成本集中在 MEMS 振镜上,大规模量产 MEMS 振镜可以降低到 30 到 50 美元,目前从外采购则是 1000 美元上下。
基于振镜和光源不同,MEMS 激光雷达 BOM 成本目前大约 450 到 1200 美元。
对于 Flash 激光雷达,没有扫描器,高功率 VCSEL 和高性能 SPAD 都处于萌芽阶段,目前价格都很高,万级像素的 Flash 激光雷达 BOM 大约 700-1000 美元左右。
未来大规模生产可以轻松降低到 100 美元以下。
那么 MEMS 的缺点是什么?
缺点就是信噪比和有效距离及 FOV 太窄。
因为 MEMS 只用一组发射激光和接收装置,那么信号光功率必定远低于机械激光雷达。
同时 MEMS 激光雷达接收端的收光孔径非常小,远低于机械激光雷达,而光接收峰值功率与接收器孔径面积成正比,这导致功率进一步下降。
这就意味着最小信号探测能力的降低,同时也意味着有效距离的缩短。
扫描系统分辨率由镜面尺寸与最大偏转角度的乘积共同决定,镜面尺寸与偏转角度是矛盾的,镜面尺寸越大,偏转角度就越小。
最后 MEMS 振镜的成本和尺寸也是正比,目前 MEMS 振镜最大尺寸是 Mirrorcle,可达 7.5 毫米,售价高达 1199 美元。
速腾聚创投资的希景科技开发的 MEMS 微振镜镜面直径为 5mm,已经进入量产阶段。
禾赛科技的 PandarGT 3.0 中用到的 MEMS 微振镜则是由自研团队提供。
英飞凌收购的 Innoluce 也能自研 MEMS 振镜。
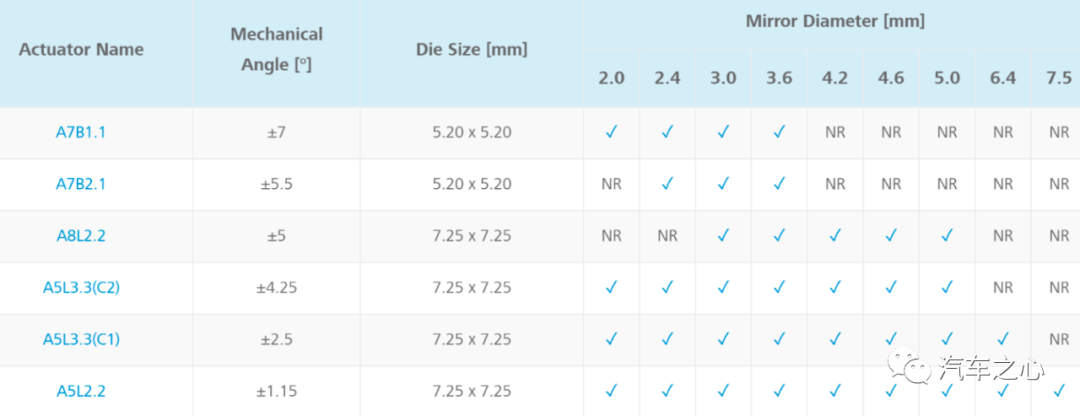
MEMS 振镜主要供应商 Mirrorcle 的产品一览,很明显,尺寸越大,角度越小。
3
电磁式 MEMS 振镜:激光雷达最佳选择
怎么解决或者改善这个问题,那就是电磁振镜。
按照驱动方式的不同,MEMS扫描镜可以分为静电驱动、电磁驱动、压电驱动和电热驱动四种驱动方式。

电热驱动是利用电能转换为热能,再转换为机械能驱动,其优点是驱动力和驱动位移较大,但是响应速度较慢。
压电驱动是利用压电材料的压电效应实现驱动,具有驱动力大、响应速度快等优点,但是压电材料存在迟滞现象。
电磁驱动是利用电磁或者永磁体实现驱动,具有较大的驱动力力和驱动位移,缺点是可能会受到电磁干扰。
静电驱动是利用带电导体间的静电作用力实现驱动,具有功耗低、速度快、兼容性好等优点。是目前使用广泛的驱动方式。
静电驱动是比较成熟的方式,上述 Mirrorcle 还有某以色列厂家都是采用静电驱动。
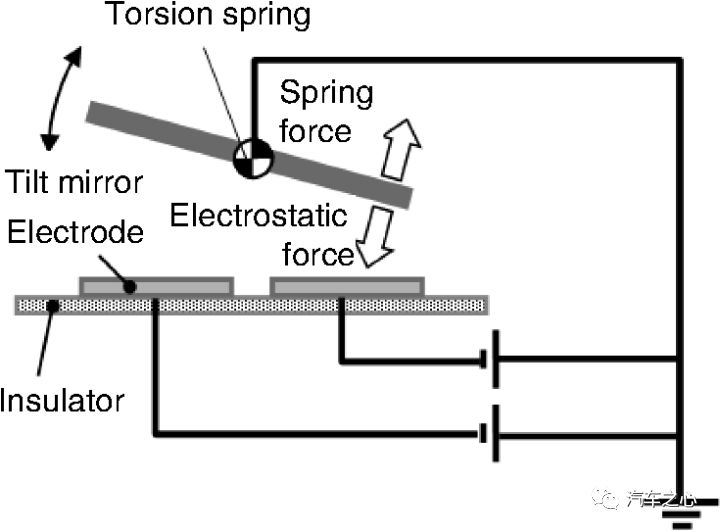
静电式 MEMS 振镜原理图
静电驱动 MEMS 扫描镜采用单晶硅制造,工艺简单、成熟、成本低,芯片尺寸非常小,驱动功耗极低,封装也比较简单,属电压驱动型器件。
缺点是力也有点小,且是非线性的,此外存在吸合现象。
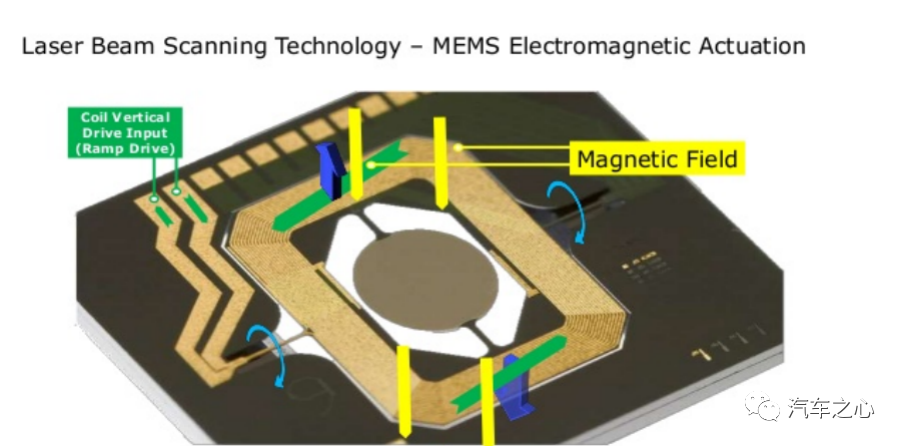
电磁式MEMS振镜
电磁驱动的力密度大,电磁驱动 MEMS 扫描镜也获得广泛的应用,其扫描角度大,可以实现线性扫描。
电磁驱动器件工艺涉及数十微米厚度的电磁线圈的制造,封装需要配置永磁铁,器件模块尺寸稍大些。
该器件属电流驱动型器件,驱动电流达数十毫安,驱动功耗较高。
器件既可工作于谐振状态,也可以工作于非谐振状态,当工作与谐振状态时,驱动功耗可以大幅度降低。
电磁式的缺点是工艺复杂,门槛高,成本略高,体积略大,响应速度略慢于静电,响应速度这点倒不成问题.
因为目前后端的数据处理能力有限,现在激光雷达数据处理除传统算法外基本都采用了深度学习算法,也用激光雷达识别目标,与视觉传感器融合.
不过,由于数据量巨大,一般只能承受 10-15Hz 的帧率,电磁式可以做到 30Hz,静电式更高,但意义不大。
另一个电磁干扰问题很容易解决,那就是增加磁屏蔽和加大磁场密度:采用目前最强的磁体 NdFeB,即钕铁硼。
至于退磁问题,烧结钕铁硼的居里温度点是 312 摄氏度,居里温度越高,磁材的工作温度也相对越高,并且温度稳定性更好。
烧结钕铁硼原料中加入钴、铽、镝等元素可提高其居里温度。
EH 牌号的钕铁硼工作温度可达 200 摄氏度,较低的 H 牌号也可以达 120 摄氏度,足以适应车载环境。
MEMS 振镜的可靠性一直被拿来作为攻击标靶,说 MEMS 振镜像薯片一样脆薄。
静电式或许真有点如此,但电磁式就不同了,其体积大,悬臂可以做的强度更高,电磁振镜可以做到 300G 以上的抗冲击,远超车规要求的 50G。
在军用及航天中的惯性制导系统普遍采用 MEMS 技术,能够承受超过 500g 的过载加速度。
该应用领域时限已经超过 30 年,而技术也逐步由军工转向民用,并非新技术。
相比之下,机械式激光雷达使用的旋转电机,达到 50G 抗冲击也有困难。
实际在车上已经有不少 MEMS 产品,包括陀螺仪、加速度计、压力传感器、MEMS 硅麦克风、AR-HUD 和大灯用的 DMD 振镜。
DMD 振镜是德州仪器独家供应,即 DLP 技术,DLP 技术已经使用超过 20 年,可靠性毋容置疑。
林肯大陆和导航员使用的是德州仪器早期 DMD 芯片 DLP3030,只有 40 万像素。
奔驰 AR HUD 使用德州仪器最新的 DMD 芯片 DLP5531(2018年下半年才量产,所以林肯没用上)有 130 万像素,FOV 为 10X5°,VID 距离为 33 英尺即 10 米,奔驰称这相当于 77 英寸显示器。
不仅在 HUD 上使用了 DLP 投影,在车大灯上,奔驰还极尽奢华使用了 DLP 投影,也是 DLP5531。
使用 MEMS 微镜的投影大灯
温度方面由温度超高的 DLP 投影背书,自然不成问题,实际 MEMS 振镜可以看成一个半导体芯片。硅基半导体的温度范围可轻易做到摄氏零下 40 到 125 度。
机械式激光雷达使用的旋转电机因为润滑油的原因:
低温状态下油凝结成脂,出现难以启动或者无法启动的现象。
高温状态下,油会挥发到镜面上,循环往复次数多了,会累积成油滴干扰光路。
这两个问题在目前机械式雷达中普遍存在。法雷奥特别增加了 PTC 加热和冷却设施。
对传统车厂来说,车规比性能重要,因此近距离选择Flash激光雷达。
对新兴车厂来说,性能比车规重要,因此选择 Luminar,而介于两者之间的厂家多选择 MEMS,如宝马,尽管 Innoviz 诸多不顺,但宝马并未放弃 MEMS 路线。
因为交期问题,Innoviz不得已在初期选择静电振镜,但正在转向电磁振镜。
综合考虑性能、车规、成本、体积、生态,MEMS电磁振镜激光雷达恐怕是这5年内大多数厂家最好的选择。
责任编辑:lq
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30464
-
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享2021-07-22 10099
-
激光雷达或迎来量产元年?2021-01-29 4638
-
激光雷达2021-01-17 20188
-
TOF激光雷达2019-06-07 9273
-
机器人和激光雷达都不可或缺2019-02-15 6221
-
北醒固态设计激光雷达2018-01-25 5865
-
消费级激光雷达的起航2017-12-07 7484
-
成熟的无人驾驶方案离不开激光雷达2017-10-23 6919
-
激光雷达究竟为什么这么牛,这么贵2017-10-16 7143
-
常见激光雷达种类2017-09-25 13999
-
激光雷达分类以及应用2017-09-19 8898
-
速腾聚创激光雷达现在实现量产2017-08-21 3518
全部0条评论

快来发表一下你的评论吧 !
