

采用嵌入式操作系统和PID控制技术实现智能微波治疗仪的设计
描述
作者:杨雪锋,李威,李允彩,许娟 来源:微计算机信息
本文主要阐述了医用微波治疗仪的智能系统的设计。简要介绍了微波治疗仪的组成原理及其功能,并详细描述了该微波治疗仪智能化自动控制系统的软硬件设计内容,同时对微波治疗仪的一些组成部件进行了相应的介绍。通过PID 调节和分段拟合对微波治疗仪的智能化控制,使得此微波治疗仪工作运行比没有利用此控制方案的情况更加稳定可靠,测试结果也表明该设计是切实可行。同时开发了上位机软件,为复诊以及治疗效果的统计分析提供了一个平台。
1 引言
微波治疗是临床上一种新的治疗手段,其设备简单,治疗效果明显,使用安全,并发症少,对组织损伤小,因此得到医务界的肯定。微波治疗仪是利用微波在人体产生的热对患者的病变部位进行辐射,从而达到治疗目的,鉴于其治疗效果显著,是当今发展无损伤治疗的理想医疗设备。目前各医院使用的微波治疗仪进口的占多数,普遍存在体积大、价格昂贵、操作复杂等缺点,而国内生产的微波治疗仪技术还需更新、输出功率稳定性欠佳,致使治疗效果不明显,缺乏一些必要的保护措施,这使得整个系统的安全性不是很好,智能化程度不理想,使用操作起来显得不方便。所以有必要对其进行重新设计,尤其在安全性和控制系统方面要使用新的设计方法,以达到最佳效果。
本文所设计的智能微波治疗仪有以下特点:(1)控制系统在硬件上使用了过载保护,软件上采用了PID 控制加分段拟合的方法,使治疗仪的安全性能和输出功率有了根本性的改变;(2)在软件的设计中采用了嵌入式操作系统,使整个微波治疗系统的可操作性能,安全性能以及稳定性都达到了一个新的高度。
2 微波治疗机理
微波是频率为300“300000MHz 波长1mm”1m 的超高频电磁波,属于非电离辐射。微波
技术在医疗诊断和治疗两方面发挥重要作用。
在微波治疗过程中,根据采用的微波功率密度的不同,而区分出热效应治疗和非热效应治疗。目前,热效应治疗机制较为明确。其治疗机制是:人体组织内大部分是由水和蛋白质等极性分子组成,在微波电场力矩的作用下,极性分子沿着微波电场的方向进行有序排列的取向运动,并随着高频电场的交变而来回转动,在转动的过程中与相邻的分子产生类似摩擦碰撞而生成热量。使受照射部位机体组织温度上升,使血管,微血管扩张,达到加快新陈代谢过程,改善局部营养,增强组织修复与再生能力的目的。与其它的热疗方法不同,微波加热的热源不是从外部传导,而是由生物组织本身产生的,这种热作用效率高,均衡性热稳定性好[4-6]。
3 系统组成及原理框图
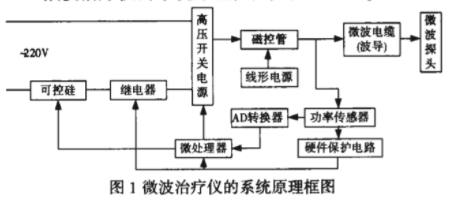
利用微波致热效应治疗原理,把生物体置于微波辐射场中完成治疗过程。仪器主要由开关高压源、磁控管、线性电源、波导、微波探头、传感器和微控制器等组成。脉宽调制式开关高压电源产生磁控管所需的高压,通过对高压直流电流的反馈控制,来稳定磁控管的输出功率,线性电源则提供稳定的直流电压给灯丝供电。磁控管采用医疗专用磁控管,波导(微波电缆)用来传输微波,微波探头插入病人患部组织里面进行治疗。传感器用来监测磁控管的输出功率。微控制器控制用来整个系统的正常运行。
通过一个全桥整流器和一个比较器,将正弦交流电转变为一系列矩形波,在矩形波的下降沿-即正弦交流电的过零点,系统将收到中断申请,表示可以触发可控硅和继电器,合适的触发点则由系统控制,以达到所要求的功率。功率传感器采集磁控管的输出,用来监测输出功率值,组成一个闭环控制系统。同时传感器的输出端还连在硬件保护电路上,如果控制系统出现故障,输出不受控制,则可能造成输出功率超出本仪器所要求的范围,此时,由硬件保护电路将检测到输出超标信号,将输出强行关断,以增强系统的可靠性。在治疗结束后,上位机软件将输出此次治疗的相关信息,并保存到数据库,以备复诊使用和进行治疗效果的统计分析。
微波治疗仪的系统原理框图如图 1 所示。
4 控制系统
控制系统是整个治疗仪器的核心,所有的控制指令都由它发出,所以控制系统的稳定性设计是整个设计的关键。
为了增强仪器的可靠性和抗干扰性,使用了专门的硬件保护电路,当硬件出现故障,微波的输出不受控制,在其功率超过设定值后,硬件保护电路将被触发,自动关断输出,提高了整个微波治疗仪的安全性。在软件设计上采用了嵌入式操作系统,使整个系统的稳定性和抗干扰性有了较大的提高。为了提高控制的可靠性和快速响应的性能,使用了PID闭环控制,同时微波管的输出功率受到电网电压,工作温度和工作时间等多方面的影响,其输出具有非线性、滞后、时变等特点,所以将传感器的输入进行分段拟合,并且在各段设置了不同的校正系数,使输出更加平稳。
4.1 控制系统硬件设计
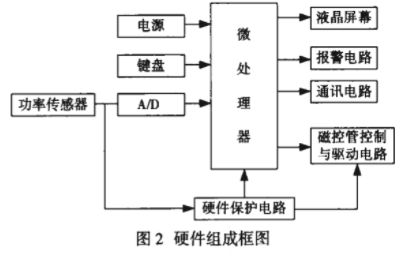
硬件主要分为以下几个部分。电源为控制系统提供电源;键盘和 LCD 显示电路完成人机对话功能;磁控管的控制电路根据程序指令的要求达到对病人不同疾病的治疗效果;硬件保护电路对控制系统出现的故障提供了可靠的保护;功率传感器和AD 转换器对微波管的输出进行监控;输出驱动则由继电器和可控硅同时完成;通讯电路完成控制器和上位机的信息交换;蜂鸣器驱动电路结合发光二极管共同对预热结束、治疗结束和故障进行报警工作。
硬件组成框图如图 2 所示:
4.1.1 电源和人机交互电路
为了防止干扰从电源窜入,电源由开关电源和滤波电路组成,抗干扰性能较好。为了方便操作,设置了治疗理疗转换键,工作暂停键,功率调节键,时间调节键和复位键;显示采用液晶屏幕加LED 指示灯,用来显示当前功率、时间和治疗状态等信息。
4.1.2 磁控管的控制和驱动电路
磁控管是微波的发射源,由阳极、谐振腔、阴极和磁场组成,当给磁控管灯丝加上3.3V直流灯丝电压,使阴极加热,同时阳极和阴极之间加2000V 左右的直流高压,阴极所发射的电子在强磁场作用下飞向阳极,阳极上有多个小的谐振腔,当电子打到阳极之前在这些谐振腔内发生振荡,谐振频率约为2450MHz。在治疗开始之后,闭合继电器,可控硅在过零点之后触发,控制微波的强度。同时功率传感器开始工作,监测微波强度。当可控硅击穿或者出现其它故障,系统不能控制磁控管的输出时,功率传感器采集到的值大于安全功率的上限,当断开可控硅无效的情况下,硬件保护电路动作,关闭继电器,断开高压电源,同时报警,提醒操作人员仪器出现故障。
4.1.3 报警和通讯电路
报警电路主要由发光二极管和蜂鸣器组成。当治疗结束或者是出现故障时,报警电路动作,将目前状态以声光方式通知操作人员。通讯电路主要负责本仪器与上位机之间的数据通讯,在治疗完毕之后,将此次治疗的相关信息上传至上位机。
4.2 控制系统软件设计
本系统软件包括上位机和仪器软件两部分。上位机软件使用VB 编写,主要记录治疗的信息,以便复诊和对治疗效果的统计分析。微控制器部分采用MicroC/OS-II 嵌入式操作系统,使整个控制系统稳定性和抗干扰性能大大增强,同时加快了设计速度并且代码易于维护。
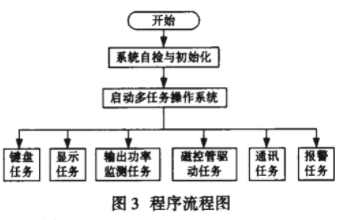
在治疗状态下,首先闭合继电器,然后检测电压的过零点,在过零点之后延时触发可控硅,延时时间由输出驱动电路和功率传感器组成PID 闭环系统控制。由于微波管的输出不是成线性变化的,所以将传感器的输入用不同的校正系数进行分段校正、拟合后,再用于PID调节。提高了控制系统的可靠性和快速响应能力,并且使输出更加平稳。
程序流程图如图 3 所示。
5 结语
本文作者创新点:该微波功率的控制方案从根本上解决了微波输出功率的失调问题。硬件上增加的保护电路使仪器的安全性能有了很大的提高,控制策略采用了分段拟合加PID控制融合的方法,既有线性化好的特点,又有PID 控制精度高、稳定性好的优点,克服了微波功率控制中非线性,滞后,时变等带来的困难。
责任编辑:gt
-
linux系统可以在arm上面开发一个低频脉冲治疗仪嵌入式设备...2014-04-15 4599
-
什么是嵌入式操作系统内存管理技术?2019-07-30 2200
-
RFID技术如何实现医疗器械的智能化控制2020-05-06 2436
-
采用嵌入式操作系统和PID控制技术实现智能微波治疗仪的设计2021-06-10 4524
-
短波治疗仪功放电路与控制系统设计2022-01-13 13657
-
基于Linux操作系统的嵌入式网关的实现2009-03-28 500
-
智能微波治疗仪及其控制系统设计2009-06-18 1076
-
基于嵌入式芯片89C51SND1C的电子治疗仪设计2010-12-16 949
-
基于STM32的红光治疗仪控制系统2012-04-18 1536
-
基于嵌入式器件AT89C51SND1C的电子治疗仪设计2016-01-20 825
-
嵌入式操作系统是什么_嵌入式操作系统有哪些2018-04-08 21503
-
嵌入式操作系统如何应用_嵌入式操作系统的组成2020-09-01 4171
-
嵌入式操作系统FreeRTOS的原理实现2021-07-30 1516
-
嵌入式操作系统2021-11-03 2440
-
什么是嵌入式操作系统?2021-12-23 10123
全部0条评论

快来发表一下你的评论吧 !
