

来自德国LOLA的人形机器人
描述
近几年,科技界迎来了机器人的大发展,工业机器人咱们暂且不论,在类人机器人的发展历史中,我们之前相继介绍过多款了。
比如最早的是日本本田已经终止开发的人形机器人ASIMO:
技能和动作水平最高的美国波士顿动力公司的机器人Atlas:
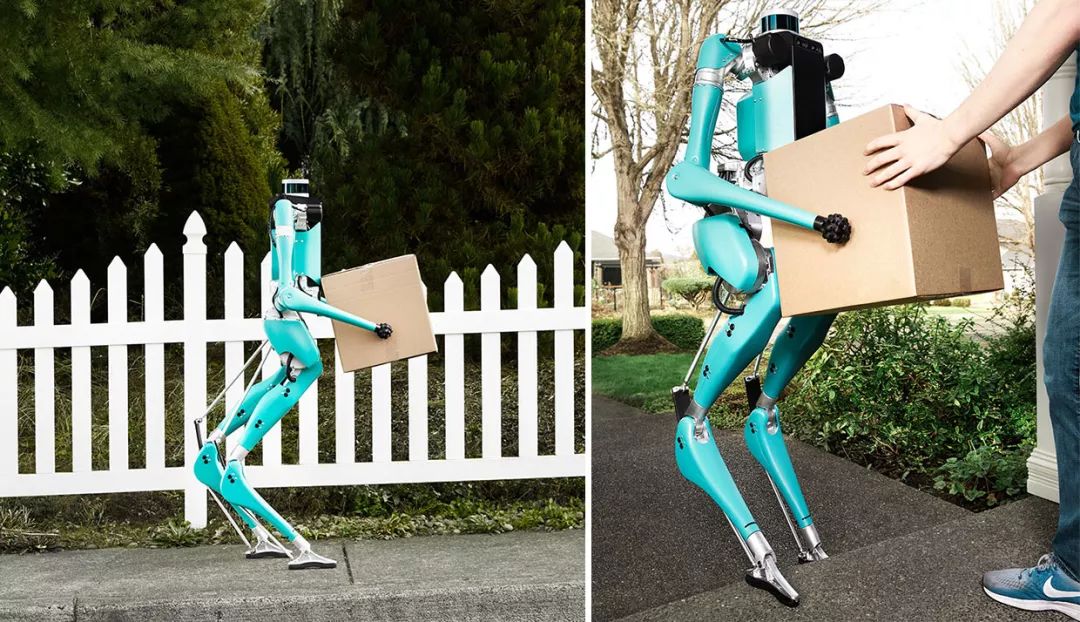
铁了心送快递的美国大长腿机器人Agility Robotics对(升级版的Cassie):
可以开车、射击、用机械工具的俄罗斯Fedor宇航机器人:

还有前段时间咱们刚介绍过的韩国的LIMS2仿人双臂机器人:
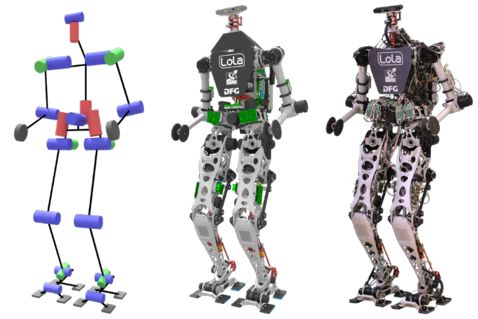
今天咱们介绍一下来自德国LOLA的人形机器人。
LOLA的人形机器人是慕尼黑工业大学机械工程系正在研究构造的一种能够快速、类似人类自主行走的机器人,他们通过改进视觉感知和步行控制的整合来解决机器人的自主性问题。
LOLA机器人研究的重点是机器人不依赖于人类感知和决策能力的自主性。研究内容包括动力学,实时运动规划控制以及此类系统的设计。
LOLA的基本信息:
身高:180厘米
体重:68kg
速度:5公里/小时
硬件:26个电动关节,由无刷直流电动机驱动。
LOLA机器人的腿部设计非常精妙,自由度分别分布在:腿6个自由度,髋关节3,膝盖1,踝关节2。其中,膝关节采用电机+滚珠丝杠传动,踝关节采用电机+同步带+锥齿轮+滚珠丝杠+连杆传动。这两个主要关节的所有驱动均布置于大腿内部,质心高,惯量低,从而为站立和行走时的稳定性提供了物理基础。
之后研发人员对LOLA的上身增加两个附加关节,即别名“手臂旋转”,这大大增加了可到达的任务空间。
近日,LOLA双足步行机器人又进行了一次重大升级,实现了依靠上肢辅助的多触点移动(multi-contact locomotion)。直观地说,就是机器人学会扶墙了: 研究团队表示,这项技术仍处于早期阶段,但它为LOLA带来了迄今为止机器人中最人性化的双足运动。 在软件方面,机器人采用了层次性架构。 在最高层次上,视觉系统先生成一个环境模型,并估计场景中机器人的6D姿态。然后,行走模式生成器使用这些信息来规划一个动态模型,引导LOLA到预定的目标位置。 在较低层次上,稳定模块来进一步完善这个环节,以补偿模型或其他因素产生的误差,并保持整体的平衡。
研究人员表示,使用LOLA进行研究的主要目标之一是在复杂,崎岖不平的地形上保持快速自主的运动,最终达到与人类相似的步行速度。
研发团队希望通过这项研究,一方面能为直立行走的控制机制提供新思路,另一方面能证明目前对人类步态的生物力学模型的理解是否正确。 当前,LOLA可以以1.8 km/h的速度进行多点接触运动并穿越不平坦的地形,这对于两足动物而言相对较快,但对人类而言仍然较慢。 平坦的地面上,LOLA的硬件使其能够以相对较高的3.38 km /h的最高速度行走。 在LOLA 变得越来越像人的同时,研究人员也在探索双足机器人如何利用它们的四肢以非人类的方式移动。用LOLA进行的这次研究就是朝更多可能性迈出的一步。
责任编辑:lq
-
伺服电动缸在人形机器人中的应用2025-02-06 1951
-
【深度剖析】德国机器人发展未来展望2016-01-12 5214
-
机器人Alpha2 美国众筹9天破百万美元2016-02-04 6831
-
为什么人形机器人更讨人喜欢?2016-05-12 5110
-
【开发教程1】人形街舞机器人-套件检测教程2022-04-22 4648
-
【教程1】人形街舞机器人-套件检测教程2022-08-12 9237
-
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评2023-12-20 1691
-
人形机器人发展现状2023-01-06 2509
-
人形机器人的落地思考2023-10-18 1777
-
全球首款具有仿人脊柱核心功能的人形机器人来了!2024-02-21 2093
-
人形机器人成为车圈“新宠”?2024-02-22 783
-
为何要做人形机器人?2024-04-09 1438
-
从市场角度简要解读“人形机器人”2024-06-29 1012
-
日本推出革命性的人形机器人2024-08-02 1546
-
作为工业强国,德国为何仅有一家人形机器人公司?2025-03-11 1111
全部0条评论

快来发表一下你的评论吧 !
