

Vivado设计流程分析 Vivado HLS实现OpenCV的开发流程
可编程逻辑
描述
本文通过对OpenCV中图像类型和函数处理方法的介绍,通过设计实例描述在vivadoHLS中调用OpenCV库函数实现图像处理的几个基本步骤,完成从OpenCV设计到RTL转换综合的开发流程。
开源计算机视觉 (OpenCV) 被广泛用于开发计算机视觉应用,它包含2500多个优化的视频函数的函数库并且专门针对台式机处理器和GPU进行优化。OpenCV的用户成千上万,OpenCV的设计无需修改即可在 Zynq器件的ARM处理器上运行。但是利用OpenCV实现的高清处理经常受外部存储器的限制,尤其是存储带宽会成为性能瓶颈,存储访问也会限制功耗效率。使用VivadoHLS高级语言综合工具,可以轻松实现OpenCV C++视频处理设计到RTL代码的转换,输出硬件加速器或者直接在FPGA上实现实时视频处理功能。同时,Zynq All-programmable SOC是实现嵌入式计算机视觉应用的极好方法,很好解决了在单一处理器上实现视频处理性能低功耗高的限制,Zynq高性能可编程逻辑和嵌入式ARM内核,是一款功耗优化的集成式解决方案。
1 OpenCV中图像IplImage, CvMat, Mat 类型的关系和VivadoHLS中图像hls::Mat类型介绍
OpenCv中常见的与图像操作有关的数据容器有Mat,cvMat和IplImage,这三种类型都可以代表和显示图像,但是,Mat类型侧重于计算,数学性较高,openCV对Mat类型的计算也进行了优化。而CvMat和IplImage类型更侧重于“图像”,opencv对其中的图像操作(缩放、单通道提取、图像阈值操作等)进行了优化。在opencv2.0之前,opencv是完全用C实现的,但是,IplImage类型与CvMat类型的关系类似于面向对象中的继承关系。实际上,CvMat之上还有一个更抽象的基类----CvArr,这在源代码中会常见。
1.1 OpenCV中Mat类型:矩阵类型(Matrix)。
在openCV中,Mat是一个多维的密集数据数组。可以用来处理向量和矩阵、图像、直方图等等常见的多维数据。
Mat有3个重要的方法:
1、Mat mat = imread(const String* filename); 读取图像
2、imshow(const string frameName, InputArray mat); 显示图像
3、imwrite (const string& filename, InputArray img); 储存图像
Mat类型较CvMat与IplImage类型来说,有更强的矩阵运算能力,支持常见的矩阵运算。在计算密集型的应用当中,将CvMat与IplImage类型转化为Mat类型将大大减少计算时间花费。
1.2 OpenCV中CvMat类型与IplImage类型:“图像”类型
在openCV中,Mat类型与CvMat和IplImage类型都可以代表和显示图像,但是,Mat类型侧重于计算,数学性较高,openCV对Mat类型的计算也进行了优化。而CvMat和IplImage类型更侧重于“图像”,openCV对其中的图像操作(缩放、单通道提取、图像阈值操作等)进行了优化。
补充:IplImage由CvMat派生,而CvMat由CvArr派生即CvArr -》 CvMat -》 IplImage
CvArr用作函数的参数,无论传入的是CvMat或IplImage,内部都是按CvMat处理。
在openCV中,没有向量(vector)的数据结构。任何时候,但我们要表示向量时,用矩阵数据表示即可。
但是,CvMat类型与我们在线性代数课程上学的向量概念相比,更抽象,比如CvMat的元素数据类型并不仅限于基础数据类型,比如,下面创建一个二维数据矩阵:
CvMat* cvCreatMat(int rows ,int cols , int type);
这里的type可以是任意的预定义数据类型,比如RGB或者别的多通道数据。这样我们便可以在一个CvMat矩阵上表示丰富多彩的图像了。
1.3 OpenCV中IplImage类型
在OpenCV类型关系上,我们可以说IplImage类型继承自CvMat类型,当然还包括其他的变量将之解析成图像数据。
IplImage类型较之CvMat多了很多参数,比如depth和nChannels。在普通的矩阵类型当中,通常深度和通道数被同时表示,如用32位表示RGB+Alpha.但是,在图像处理中,我们往往将深度与通道数分开处理,这样做是OpenCV对图像表示的一种优化方案。
IplImage的对图像的另一种优化是变量origin----原点。在计算机视觉处理上,一个重要的不便是对原点的定义不清楚,图像来源,编码格式,甚至操作系统都会对原地的选取产生影响。为了弥补这一点,openCV允许用户定义自己的原点设置。取值0表示原点位于图片左上角,1表示左下角。
1.4 VivadoHLS中图像数据类型hls::Mat《》
VivadoHLS视频处理函数库使用hls::Mat《》数据类型,这种类型用于模型化视频像素流处理,实质等同于hls::steam《》流的类型,而不是OpenCV中在外部memory中存储的matrix矩阵类型。因此,在HLS实现OpenCV的设计中,需要将输入和输出HLS可综合的视频设计接口,修改为Video stream接口,也就是采用HLS提供的video接口可综合函数,实现AXI4 video stream到VivadoHLS中hls::Mat《》类型的转换。
2 使用VivadoHLS实现OpenCV到RTL代码转换的流程
2.1 OpenCV设计中的权衡
OpenCV图像处理是基于存储器帧缓存而构建的,它总是假设视频frame数据存放在外部DDR 存储器中,因此,OpenCV对于访问局部图像性能较差,因为处理器的小容量高速缓存性能不足以完成这个任务。而且出于性能考虑,基于OpenCV设计的架构比较复杂,功耗更高。在对分辨率或帧速率要求低,或者在更大的图像中对需要的特征或区域进行处理是,OpenCV似乎足以满足很多应用的要求,但对于高分辨率高帧率实时处理的场景下,OpenCV很难满足高性能和低功耗的需求。
基于视频流的架构能提供高性能和低功耗,链条化的图像处理函数能减少外部存储器访问,针对视频优化的行缓存和窗口缓存比处理器高速缓存更简单,更易于用FPGA部件,使用VivadoHLS中的数据流优化来实现。
VivadoHLS对OpenCV的支持,不是指可以将OpenCV的函数库直接综合成RTL代码,而是需要将代码转换为可综合的代码,这些可综合的视频库称为HLS视频库,由VivadoHLS提供。
OpenCV函数不能直接通过HLS进行综合,因为OpenCV函数一般都包含动态的内存分配、浮点以及假设图像在外部存储器中存放或者修改。
VivadoHLS视频库用于替换很多基本的 OpenCV函数,它与OpenCV具有相似的接口和算法,主要针对在FPGA架构中实现的图像处理函数,包含了专门面向FPGA的优化,比如定点运算而非浮点运算(不必精确到比特位),片上的行缓存(line buffer)和窗口缓存(window buffer)。
2.2 VivadoHLS实现OpenCV设计流程介绍
使用VivadoHLS实现OpenCV的开发,主要的三个步骤如下:
在计算机上开发OpenCV应用,由于是开源的设计,采用C++的编译器对其进行编译,仿真和debug,最后产生可执行文件。这些设计无需修改即可在 ARM内核上运行OpenCV应用。
使用I/O函数抽取FPGA实现的部分,并且使用可综合的VivadoHLS Video库函数代码代替OpenCV函数的调用。
运行HLS生成RTL代码,在vivadoHLS工程中启动co-sim,重用openCV的测试激励验证产生的RTL代码。在ISE或者Vivado开发环境中做RTL的集成和SOC/FPGA实现。
2.2.1 VivadoHLS视频库函数
HLS视频库是包含在hls命名空间内的C++代码。#include “hls_video.h”
与OpenCV等具有相似的接口和等效的行为,例如:
OpenCV库:cvScale(src, dst, scale, shift);
HLS视频库:hls:cale《。。。》(src, dst, scale, shift);
一些构造函数具有类似的或替代性的模板参数,例如:
OpenCV库:cv::Mat mat(rows, cols, CV_8UC3);
HLS视频库:hls::Mat mat(rows, cols);
ROWS和COLS指定处理的最大图像尺寸
表2.2.1 VivadoHLS视频处理函数库
2.2.2 VivadHLS实现OpenCV设计的局限性
首先,必须用HLS视频库函数代替OpenCV调用。
其次,不支持OpenCV通过指针访问帧缓存,可以在HLS中使用VDMA和 AXI Stream adpater函数代替。
再者,不支持OpenCV的随机访问。HLS对于读取超过一次的数据必须进行复制,更多的例子可以参见见hls:uplicate()函数。
最后,不支持OpenCVS的In-place更新,比如 cvRectangle (img, point1, point2)。
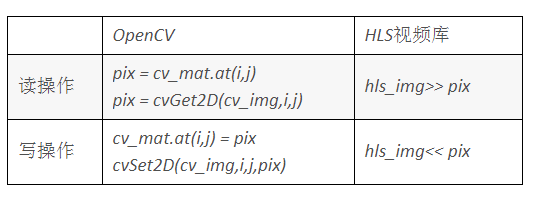
下面表格2.2.2列举了OpenCV中随机访问一帧图像处理对应HLS视频库的实现方法。
OpenCVHLS视频库
读操作pix = cv_mat.at(i,j)
pix = cvGet2D(cv_img,i,j)hls_img 》》 pix
写操作cv_mat.at(i,j) = pix
cvSet2D(cv_img,i,j,pix)hls_img 《《 pix
表 2.2.2 OpenCV和HLS中对一帧图像像素访问对应方法
2.3 用HLS实现OpenCV应用的实例(快速角点滤波器image_filter)
我们通过快速角点的例子,说明通常用VivadoHLS实现OpenCV的流程。首先,开发基于OpenCV的快速角点算法设计,并使用基于OpenCV的测试激励仿真验证这个算法。接着,建立基于视频数据流链的OpenCV处理算法,改写前面直觉的OpenCV的通常设计,这样的改写是为了与HLS视频库处理机制相同,方便后面步骤的函数替换。最后,将改写的OpenCV设计中的函数,替换为HLS提供的相应功能的视频函数,并用VivadoHLS综合,最后在Xilinx开发环境下实现。当然,这些可综合代码也可在处理器或ARM上运行。
2.3.1 设计基于OpenCV的视频滤波器设计和测试激励
在这个例子中,首先设计开发完全调用OpenCV库函数的快速角点滤波器设计opencv_image_filter.cpp和这个滤波器的测试激励opencv_image_filter_tb.cpp,测试激励用于仿真验证opencv_image_filter算法功能。算法和测试激励设计代码如下:
void opencv_image_filter(IplImage* src, IplImage* dst)
{
IplImage* gray = cvCreateImage( cvGetSize(src), 8, 1 );
std::vector keypoints;
cv::Mat gray_mat(gray,0);
cvCvtColor( src, gray, CV_BGR2GRAY );
cv::FAST( gray_mat, keypoints, 20, true);
cvCopy( src,dst);
for (int i=0;i
{
cvRectangle(dst, cvPoint(keypoints[i].pt.x-1,keypoints[i].pt.y-1),
cvPoint(keypoints[i].pt.x+1,keypoints[i].pt.y+1), cvScalar(255,0,0),CV_FILLED);
}
cvReleaseImage( &gray );
}
例子2.3.1.1 通常的OpenCV视频处理代码opencv_image_filter.cpp
int main (int argc, char** argv) {
IplImage* src=cvLoadImage(INPUT_IMAGE);
IplImage* dst = cvCreateImage(cvGetSize(src), src-》depth, src-》nChannels);
opencv_image_filter(src, dst);
cvSaveImage(OUTPUT_IMAGE_GOLDEN, dst);
cvReleaseImage(&src);
cvReleaseImage(&dst);
return 0;
}
例子2.3.1.2 OpenCV视频处理测试激励代码opencv_image_filter_tb.cpp
上面的例子是直接调用OpenCV在处理器上软件应用实现的例子,可以看到在算法设计中直接调用opencV库函数,测试激励读入图像,经过滤波器处理输出的图像保存分析。可以看到,算法的处理基于IPIimage类型,输入和输出图像都使用此类型。
2.3.2 使用IO函数和Vivado HLS视频库替换OpenCV函数库
需要特别说明的是,xilinx通常使用的视频处理模块都是基于axi4 streaming协议进行不同模式见像素数据的交互,也就是我们所说的AXI4 video接口协议格式。为了和xilinx视频库接口协议统一,VivadoHLS提供了视频接口函数库,用于从OpenCV程序中抽取需要进行RTL综合转换的顶层函数,并把这些可综合的代码和OpenCV不可综合转换的代码进行隔离。然后,对需要综合转换为RTL代码的OpenCV函数,用xilinx VivadoHLS提供相应功能的可综合video函数进行替换。最后在C/C++编译环境下仿真验证OpenCV代码和替换video函数后功能的一致,并在VivadoHLS开发环境中做代码综合和产生RTL代码的co-sim混合仿真验证。
VivadoHLS可综合的视频接口函数:
Hls::AXIvideo2Mat 转换AXI4 video stream到hls::Mat表示格式
Hls::Mat2AXIvideo 转换hls::Mat数据格式到AXI4 video stream
首先,我们对2.3.1中OpenCV的设计进行改写,改写的代码还是完全基于OpenCV的函数,目的是为了对视频的处理机制基于视频流的方式,与VivadoHLS视频库提供函数的处理机制一致。下面是OpenCV设计的另一种写法:
void opencv_image_filter(IplImage* src, IplImage* dst)
{
IplImage* gray = cvCreateImage( cvGetSize(src), 8, 1 );
IplImage* mask = cvCreateImage( cvGetSize(src), 8, 1 );
IplImage* dmask = cvCreateImage( cvGetSize(src), 8, 1 );
std::vector keypoints;
cv::Mat gray_mat(gray,0);
cvCvtColor(src, gray, CV_BGR2GRAY );
cv::FAST(gray_mat, keypoints, 20, true);
GenMask(mask, keypoints);
cvDilate(mask,dmask);
cvCopy(src,dst);
PrintMask(dst,dmask,cvScalar(255,0,0));
cvReleaseImage( &mask );
cvReleaseImage( &dmask );
cvReleaseImage( &gray );
}
例子2.3.2.1另一种OpenCV设计应用opencv_image_filter.cpp
其次,使用Vivado HLS视频库替代标准OpenCV函数,并使用可综合的视频接口函数,采用video stream的方式交互视频数据。用于FPGA的硬件可综合模块由VivadoHLS视频库函数与接口组成,我们用hls命名空间中的相似函数代替OpenCV函数,增加接口函数构建AXI4 stream类型的接口。
void image_filter(AXI_STREAM& input, AXI_STREAM& output, int rows, int cols)
{
//Create AXI streaming interfaces for the core
#pragma HLS RESOURCE variable=input core=AXIS metadata=“-bus_bundle INPUT_STREAM”
#pragma HLS RESOURCE variable=output core=AXIS metadata=“-bus_bundle OUTPUT_STREAM”
#pragma HLS RESOURCE core=AXI_SLAVE variable=rows metadata=“-bus_bundle CONTROL_BUS”
#pragma HLS RESOURCE core=AXI_SLAVE variable=cols metadata=“-bus_bundle CONTROL_BUS”
#pragma HLS RESOURCE core=AXI_SLAVE variable=return metadata=“-bus_bundle CONTROL_BUS”
#pragma HLS interface ap_stable port=rows
#pragma HLS interface ap_stable port=cols
hls::Mat _src(rows,cols);
hls::Mat _dst(rows,cols);
#pragma HLS dataflow
hls::AXIvideo2Mat(input, _src);
hls::Mat src0(rows,cols);
hls::Mat src1(rows,cols);
#pragma HLS stream depth=20000 variable=src1.data_stream
hls::Mat mask(rows,cols);
hls::Mat dmask(rows,cols);
hls:calar《3,unsigned char》 color(255,0,0);
hls:uplicate(_src,src0,src1);
hls::Mat gray(rows,cols);
hls::CvtColor(src0,gray);
hls::FASTX(gray,mask,20,true);
hls:ilate(mask,dmask);
hls:aintMask(src1,dmask,_dst,color);
hls::Mat2AXIvideo(_dst, output);
}
例子2.3.2.2 采用VivadoHLS视频库替换后可综合的设计opencv_image_filter.cpp
最后,在vivadoHLS开发环境下综合例子2.3.2.2的设计,产生RTL代码并重用OpenCV的测试激励验证RTL代码功能。
3 VHLS实现OpenCV设计流程总结
通过上面章节介绍以及在vivadoHLS工具中实现opencV设计的例子可以看出,OpenCV函数可实现计算机视觉算法的快速原型设计,并使用VivadoHLS工具转换为RTL代码在FPGA或者Zynq SOC上实现高分辨率高帧率的实时视频处理。计算机视觉应用与生俱来的异构特性,使其需要软硬件相结合的实现方案。Vivado HLS视频库能加快OpenCV函数向FPGA可编程架构的映射。
-
探索Vivado HLS设计流,Vivado HLS高层次综合设计2020-12-21 4731
-
Vivado HLS设计流程2025-04-16 1926
-
Vivado HLS视频库加速Zynq-7000 All Programmable SoC OpenCV应用2013-12-30 4286
-
用OpenCV和Vivado HLS加速基于Zynq SoC的嵌入式视觉应用开发2014-04-21 5448
-
请问一下Vivado HLS设计流程是怎样的?2021-06-17 1483
-
Vivado HLS实现OpenCV图像处理的设计流程与分析2021-07-08 5355
-
嵌入式硬件开发学习教程——Xilinx Vivado HLS案例 (流程说明)2021-11-11 3626
-
Hackaday读者有话说:Vivado HLS使用经验分享2017-02-08 938
-
Vivado设计之Tcl定制化的实现流程2017-11-18 4300
-
TCL脚本简介 vivado hls 的设计流程2018-06-05 7635
-
基于Vivado HLS的计算机视觉开发2018-11-10 1896
-
Xilinx FPGA Vivado开发流程介绍2023-02-21 5544
-
用TCL定制Vivado设计实现流程2023-05-05 2506
-
vivado仿真流程2023-07-18 7304
-
vivado主界面及设计流程2023-09-17 5254
全部0条评论

快来发表一下你的评论吧 !
