

浅谈实现高级电动机控制系统的两个主要因素
电子说
描述
采用基于带有无传感器磁场定向控制(FOC)的永磁同步电动机(PMSM)的高级电动机控制系统,有两个主要的驱动因素:提高能源效率和加强产品差异化。虽然具有无传感器FOC的PMSM已被证明可以实现这两个目标,但需要一种提供整体解决方法的生态系统。
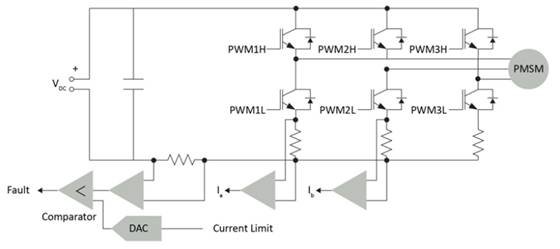
图1:使用三相电压源逆变器的三相无传感器PMSM控制系统
为什么选择PMSM?
PMSM电动机是使用电子换向的无刷电动机。它经常与无刷直流电动机(BLDC)混淆,后者是无刷电动机家族的另一成员,它也使用电子换向,但结构略有不同。PMSM的结构针对FOC进行了优化,而BLDC电机经过优化以使用6步切换技术。优化导致PMSM具有正弦反向电动势(Back-EMF),而BLDC电机具有梯形反向电动势。
这些电动机中的转子传感器也不同。PMSM通常使用位置编码器,而BLDC电机使用三个霍尔传感器进行操作。如果需要考虑成本,设计人员可以考虑采用无传感器技术,从而消除了磁体、传感器、连接器和布线的成本。由于减少了系统中可能发生故障的组件,因此消除传感器还提高了可靠性。当将无传感器PMSM与无传感器BLDC进行比较时,使用FOC算法的无传感器PMSM可以提供更好的性能,同时使用类似的硬件设计,并且实现成本相当。
切换到PMSM的最大受益者是那些当前使用有刷直流(BDC)或交流感应电动机(ACIM)。开关的主要优点包括更低的功耗,更高的速度,更平稳的转矩,更低的噪声,更长的使用寿命以及更小的尺寸,从而使该技术更具竞争力。但是,为了通过使用PMSM实现这些好处,开发人员需要实现更复杂的FOC控制技术以及其他特定于应用的算法,以满足系统需求。与BDC或ACIM相比,PMSM更为昂贵,但它提供了更多优势。
实施挑战
但是,要实现使用PMSM的优势,需要了解实现先进的FOC电机控制技术所固有的硬件复杂性,以及所需的领域专业知识。图1显示了使用三相电压源逆变器的三相无传感器PMSM控制系统。控制逆变器需要三对相互关联的高分辨率PWM信号,以及大量需要信号调理的模拟反馈信号。该系统还需要具有容错的硬件保护功能,该功能使用高速模拟比较器进行设计以实现快速响应。感测、控制和保护所需的这些额外的模拟组件会增加解决方案成本,典型的BDC电机设计或ACIM的控制不需要这些。
定义和验证PMSM电机控制应用的组件规格还需要额外的开发时间。为了应对这些挑战,设计人员可以选择微控制器,可以提供高度的模拟集成,并具有针对PMSM电机控制量身定制的设备规格。这将减少所需的外部组件数量,并优化物料清单(BOM)。高度集成的电机控制设备现已提供高分辨率PWM,以方便实施高级控制算法,用于精密测量和信号调节的高速模拟外设,功能安全所需的硬件外设以及用于通信和调试的串行接口。
同样具有挑战性的是电动机控制软件与电动机机电行为之间的相互作用。图2显示了标准的无传感器FOC框图。要将其从一个概念应用于实际设计,需要了解控制器架构和数字信号处理器(DSP)指令,以实现对数学要求严格的时间紧迫的控制回路。
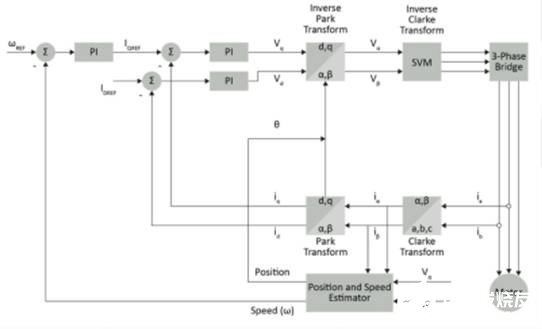
图2:标准无传感器FOC的框图
为了获得可靠的性能,控制回路必须在一个PWM周期内执行。需要对控制回路进行时间优化的三个原因。
1)约束:使用等于或大于20KHz(50uS时间段)的PWM开关频率来抑制逆变器开关产生的噪声。
2)为了获得更高带宽的控制系统,控制回路必须在一个PWM 周期内执行。
3)为了支持其他后台任务,例如系统监视,特定于应用程序的功能和通信,控制回路需要运行得更快。FOC算法的目标应是在少于10uS的时间内执行。
许多制造商都提供了FOC展示软件,该软件带有用于转子位置的无传感器估算器。但是,在FOC算法甚至无法开始旋转电动机之前,必须配置各种参数以使其与电动机和硬件相匹配。为了满足所需的速度和效率目标,必须进一步优化控制参数和系数。这可以通过以下组合实现:1)使用电机数据表推导参数,2)通过试错法进行实验。当电动机参数可能无法始终准确地表征电动机参数时,或者当设计人员无法使用高精度测量设备时,开发人员将不得不采用试错法。手动调整的过程需要时间和经验。
PMSM电动机用于许多不同的应用,可在不同的环境中运行或具有不同的设计限制。例如,在汽车散热器风扇中,当发动机将要启动时,由于风的作用,风扇叶片可沿反方向自由旋转。在这种情况下,使用无传感器算法启动PMSM电机是一项挑战,可能会损坏逆变器。一种解决方案是检测旋转方向和转子位置,并使用此信息通过主动制动,在启动电动机之前使电动机减速至停止状态。同样,可能有必要实施其他算法,例如每安培最大转矩(MTPA),转矩补偿和弱磁等。这些类型特定于应用程序的附加算法对于开发实用的解决方案是必不可少的,但它们也会因为增加开发时间和软件验证复杂化而增加设计复杂性。
降低复杂度的一种解决方案是让设计人员创建一种模块化软件体系结构,该体系结构使特定于应用程序的算法可以添加到FOC算法中,而不会影响时间紧迫的执行。图3显示了典型的实时电机控制应用程序的软件架构。该框架的核心是FOC功能,它具有严格的时序约束和许多特定于应用的附加功能,框架中的状态机负责控制功能与主应用程序接口。该体系结构需要在软件功能块之间有一个定义明确的接口,以使其模块化并简化代码维护。模块化框架支持将不同的特定于应用程序的算法与其他系统监视,保护和功能安全案例进行集成。
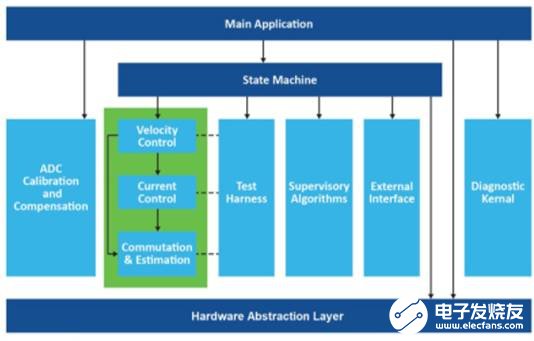
图3:FOC的应用框架
模块化体系结构的另一个好处是将外围接口层(或硬件抽象层)与电机控制软件分离,这使设计人员可以随着应用程序和性能要求的变化将IP无缝地从一个电机控制器迁移到另一个电机控制器。
完整生态系统的要求
为了应对这些挑战,需要针对无传感器FOC设计量身定制的电机控制生态系统。电机控制器,硬件,软件和开发环境都应一起工作,以简化实现高级电机控制算法的过程。为此,生态系统应具有以下功能:
1.一种高级工具,可自动执行电机参数测量,设计控制环并生成源代码,使没有专业知识的设计人员也可以实现FOC电机控制以及编写和调试非常耗时的关键代码。
2. FOC的应用程序框架和不同的特定于应用程序的附加算法减少了开发和测试时间。
3.具有确定性响应的电机控制器和集成的模拟外设,可在单个芯片中进行信号调理和系统保护,从而降低了解决方案的总成本。
图4显示了一个电机控制生态系统架构的示例,其中包括应用程序框架和用于高性能dsPIC33电机控制数字信号控制器(DSC)的开发套件。该开发套件基于GUI的FOC软件开发工具构建,该工具可以测量关键的电机参数并自动调整反馈控制增益。它还使用Motor Control应用程序框架(MCAF)为在开发环境中创建的项目生成所需的源代码。解决方案堆栈的核心是电机控制库,它使实现应用程序的时间紧迫的控制回路功能以及与dsPIC33 DSC的电机控制外设进行交互成为可能。这个GUI与多个可用的电机控制开发板配合使用,以支持电机参数提取以及适用于各种低压和高压电机的FOC代码生成。

图4:Microchip Technology电机控制生态系统架构
对高能效和产品差异化的需求推动了向无刷电机的过渡。 全面的电机控制生态系统提供了一种整体方法来简化带有PMSM的无传感器FOC的实现,并且应包括专用的电机控制器,快速原型开发板和易于使用的FOC开发软件,以实现代码自动生成。
编辑:lyn
-
设计一个PLC控制电动机正停反的控制系统2023-07-18 6558
-
同步电动机励磁控制系统对振荡的影响2023-03-02 1143
-
决定仿真精度的主要因素2021-11-11 2862
-
基于DSP的电动机控制系统的电磁兼容该如何去设计2021-08-18 1584
-
怎么实现基于PLC和变频器的双馈电动机节能控制系统设计?2021-05-31 1845
-
选择测试设备时需要考虑的主要因素有哪些?2021-05-18 2907
-
影响SNR损失的主要因素有哪些?2021-03-11 3260
-
电动机异常烧毁,电动机匝间短路的主要因素是什么2020-11-18 4002
-
影响电机结构的主要因素有哪些2020-03-15 6190
-
89C51单片机的步进电动机控制系统设计2018-01-16 16357
-
详细介绍基于DSP步进电动机控制系统设计2014-10-30 3996
-
小电动机的两个近似公式2009-08-14 736
-
行波超声电动机驱动控制系统设计2009-07-08 917
-
什么是伺服电动机2008-11-19 14017
全部0条评论

快来发表一下你的评论吧 !
