

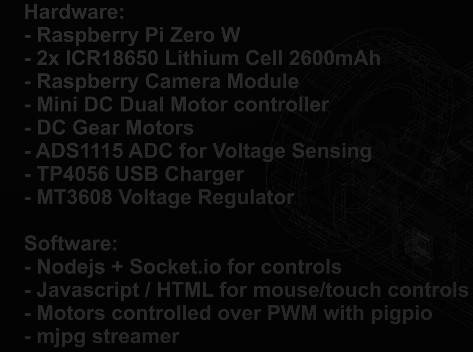
基于在Raspberry Pi Zero W的基础上实现设计微型机器人
描述
该项目是在Raspberry Pi Zero W的基础上设计的微型机器人,该机器人可通过无线控制将拍摄视频反馈给用户。此外,Raspberry Pi Zero W内置wifi,因此不需要路由器。
主要功能:
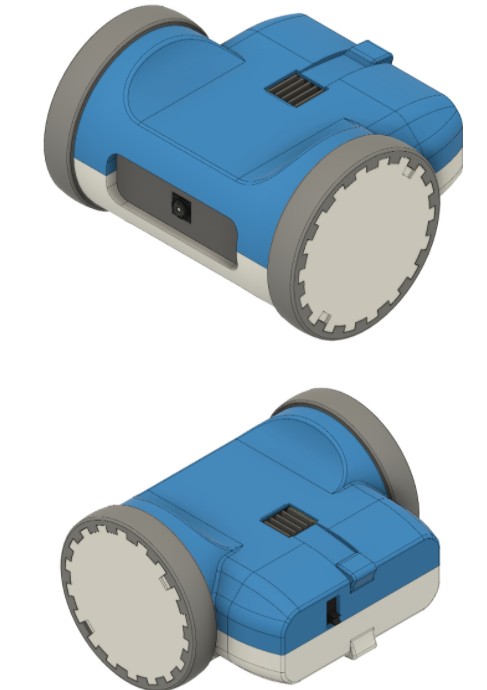
带有3D打印组件的紧凑型CAD设计
通过操纵杆(和多点触摸)进行模拟控制
仅使用标准移动电源即可提供简单的电池解决方案
低延迟流(〜0.2s)
易于制造且成本低廉
原理图:
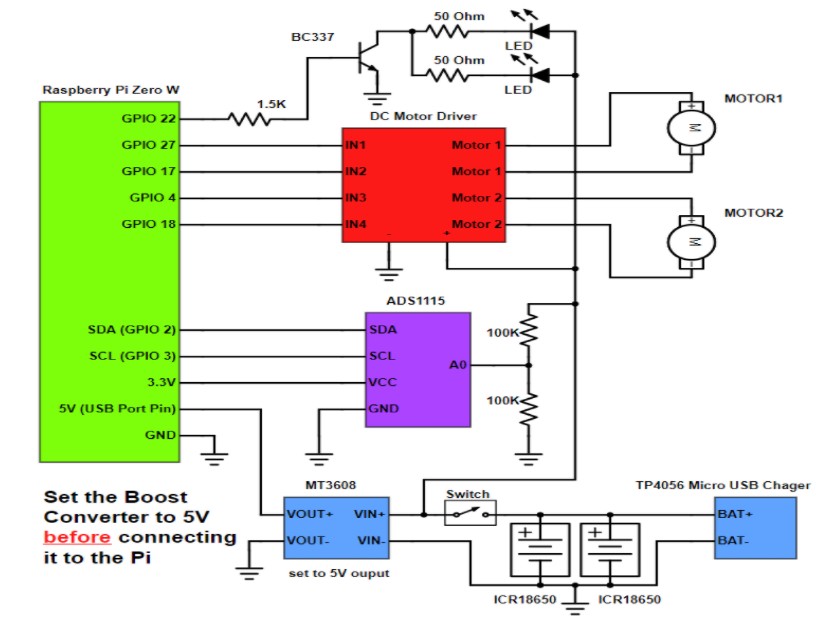
该原理图针对可读性进行了优化。只要电气连接保持不变,就不必使用这种确切的布线(例如,连接ADS1115的LED指示灯)。对于线规,信号连接使用约22 AWG的线,电池和电动机使用稍粗的线。
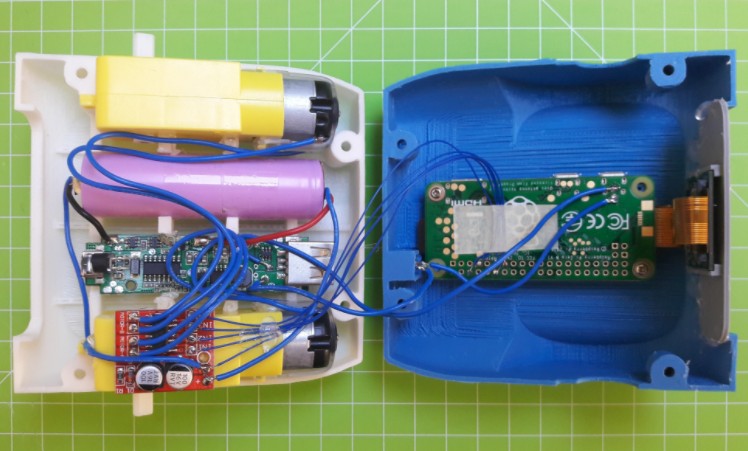
原型:
将电机连接到控制器,并拥护油漆胶带将其余零件固定在机器人的机箱上。
完成原型后,在Fusion 360中找到适合设计的形状,并使用3D打印零件。
组装:
大多数组件都粘在壳内,两个壳体使用四个六角凹头螺丝钉连接。
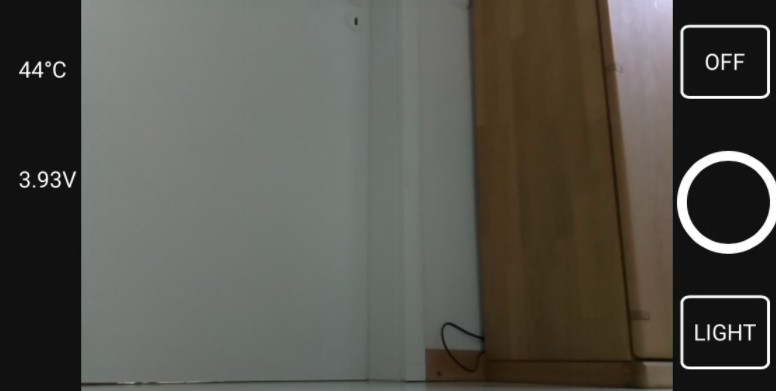
演示:
感觉该机器人缺少一些重要功能,所以对其进行了改进,并增加了一些新的功能:
不再由带有移动电源的单个电池供电,而是由两节2600mAh并联电池供电,无需打开外壳即可为电池充电。
可以测量电池电压并将其显示在用户界面上。
有一个关机按钮,在显示确认提示后安全关闭Pi。这样可以防止文件系统损坏。
用户界面已针对各种屏幕尺寸进行了优化。现在有用于不同功能的按钮:
新的版本:
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
在Raspberry Pi Zero上监视Wi-Fi2023-06-16 968
-
基于微流控和浸渍密封技术的微型机器人2023-01-03 1928
-
Raspberry Pi Zero W和Python 3入门2022-12-16 1037
-
基于Raspberry Pi Zero W的气象站2022-12-13 826
-
微型机器人由哪些部分组成2021-09-10 1746
-
选择微型机器人电机需要考虑什么?2021-01-22 2301
-
微型机器人关节使用超声波电机的优势2020-11-02 2821
-
详谈仿白细胞微型机器人的应用2020-08-06 1280
-
微雪电子Raspberry Pi Zero W 墨水屏套餐简介2020-01-12 2814
-
微型机器人会给我们的生活带来什么影响2019-10-29 4045
-
微型机器人可以给我们带来什么好处2019-10-24 9596
-
如何设置Raspberry Pi Zero W2019-07-26 8711
-
树莓派推出新产品 Raspberry Pi Zero W,内建 Wi-Fi 及蓝牙模组的 10 美元电脑2019-04-02 812
-
血管微型机器人无损伤体内驱动方法2009-06-28 2336
全部0条评论

快来发表一下你的评论吧 !
