

微型机器人如何通过光电晶体管来感知外界?
电子说
描述
该项目主要介绍了三个微型机器人,它们有很多相似之处,如:控制器、电池以及它们的运动机制,而且它们都是通过光电晶体管来感知外界。但是它们具有不同的功能。
在该设计中,至少需要一只光电晶体管和一个LED,这是进行交互的必要条件。交互的类型取决于机器人的类型。例如,机器人1的视线是指向下方以扫描表面,而机器人3则仅向前看。
它们是像机器人之间的数据传输一样复杂,还是像干扰其他机器人的视线一样简单,取决于它们的编程方式。
我还没有对它们进行复杂的编程,所以,它们的主要行为特征为:
机械手1-左眼和右眼向下看。可以检测地面上的亮度模式,它充当的是线路跟随者。
机械手2-一只眼睛向下,一只向前。控制其发光二极管周围的一组LED。它可以看到地面的亮度并向前看。它也可以通过LED向各个方向发出信号。
机械手3-一只眼睛向前看,两个独立控制的LED指向左右两侧成45度角。它应该能够检测到障碍物并确定应转向哪个方向以避开障碍物。我仍在开发此功能。
硬件:
所需组件:
ATtiny85.。..。..。..。..1个 (控制器可以是任意8个引脚的ATtiny)
2N7002K MOSFET.。..。..。..。..2个
小型马达。..。..。..。...2个
红色LED.。..。..。..。..一些
ASDL-6620光电晶体管。..。..。..。..。一些
SMD电阻器和电容器。..。..。..。..。一些
LIR2032 3.6V可充电锂纽扣电池。..。..。..。...1个(续航时间较短)
原理图:
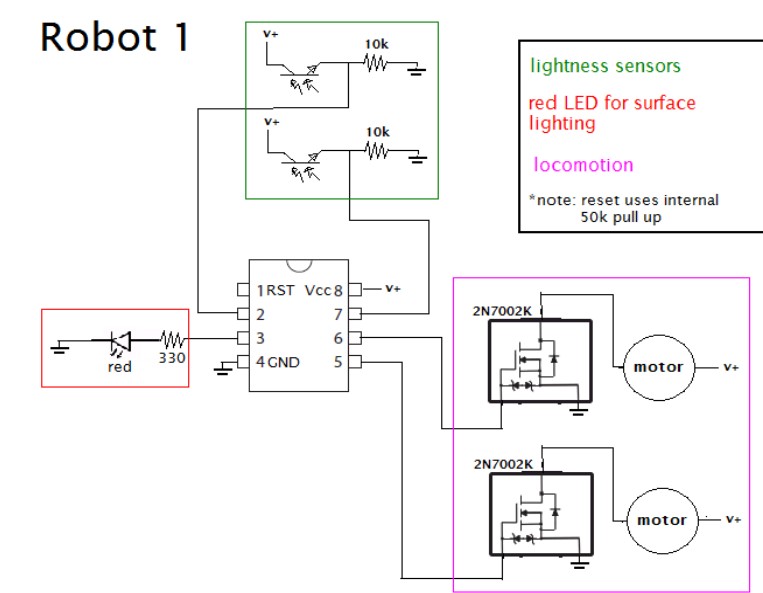
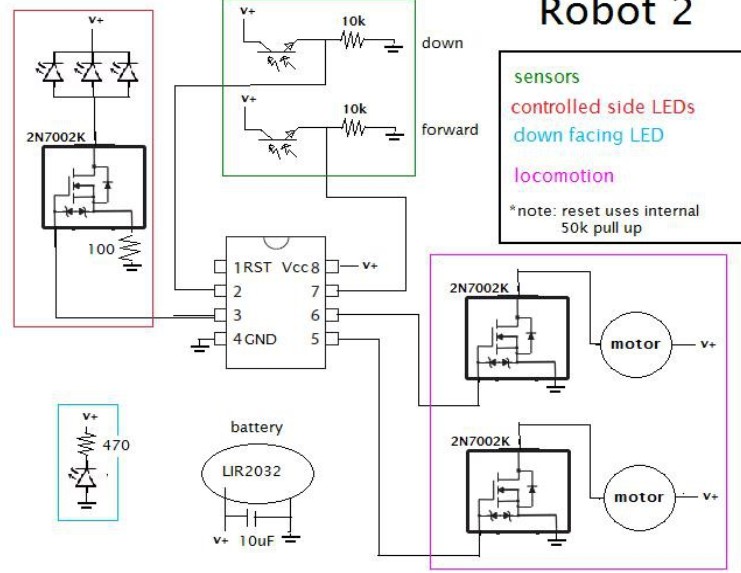
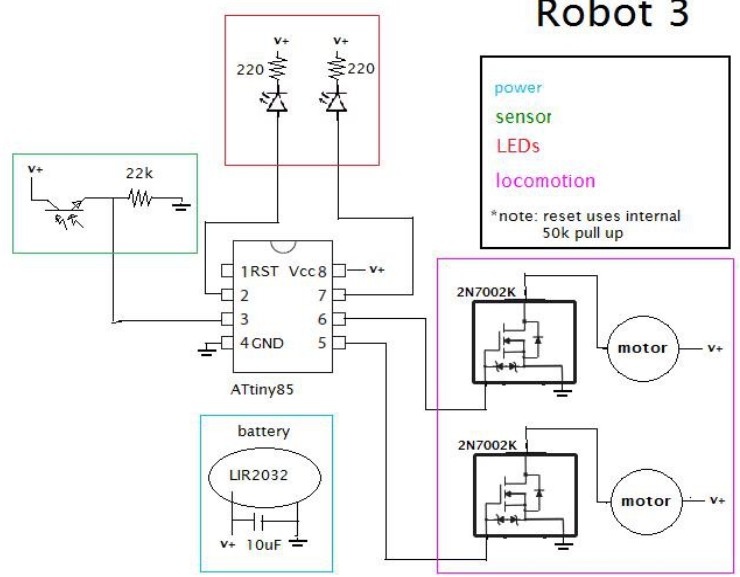
机器人底部示意图
软件:
主循环仅调用行为函数,所以可以很容易的在代码中添加其它的行为函数:
机器人1遵循一条行为;
机器人2扫描地面,并可以向该区域的其他机器人发出信号;
机器人3避开了障碍物(仍在该障碍物上工作)。
责任编辑:pj
-
用于混合组装的微型光电晶体管光耦合器 skyworksinc2025-07-03 87
-
什么是光电晶体管?光电晶体管的工作原理和结构2024-07-01 6436
-
光电晶体管的工作原理,如何使用光电晶体管构建一个自动开关2024-02-11 6206
-
光电晶体管的工作原理,基于光电晶体管构建的自动灯开/关开关2023-06-29 2135
-
光电晶体管的工作原理和用途2023-05-17 4631
-
光电晶体管工作原理2023-05-16 2247
-
光电晶体管电路的设计基础2022-11-15 708
-
使用LED和光电晶体管来感应手指的心跳2022-11-09 685
-
光电二极管和光电晶体管的工作原理2022-07-27 4044
-
什么是光电晶体管以及其应用2022-04-21 7132
-
什么是光电晶体管,光电晶体管电路解析2021-06-23 10780
全部0条评论

快来发表一下你的评论吧 !
